基于RC6—9控制器的双钢轮振动压路机控制系统开发
2017-01-03张佩王凯
张佩+王凯

摘要本文介绍了双钢轮振动压路机的控制技术,开发了基于RC6-9控制器的压路机控制系统。给出了行驶系统、振动系统、洒水系统等关键系统的控制方法及流程;通过模拟试验,验证了控制方法的合理性。
关键词双钢轮振动压路机;控制系统;RC6-9控制器
双钢轮振动压路机在作业过程中存在着很多影响压实质量的问题,比如振动的频率不稳定,系统的压力冲击较大等。而目前高频电控技术在双钢轮振动压路机上的应用在国内还处于初级阶段,不能充分解决上述问题。本文所研究的双钢轮振动压路机控制技术针对上述影响压实质量的问题,提出独有的控制方法,改善压实质量。
1RC6-9控制器简介
在控制器选择上,通过纵向横向比较,最终选择了以生产液压元件和相应控制器件的博世力士乐公司的RC6-9控制器,作为本文研究样机的控制器,其性能如表1所示。
2双钢轮振动压路机控制系统设计
2.1控制系统的总体结构
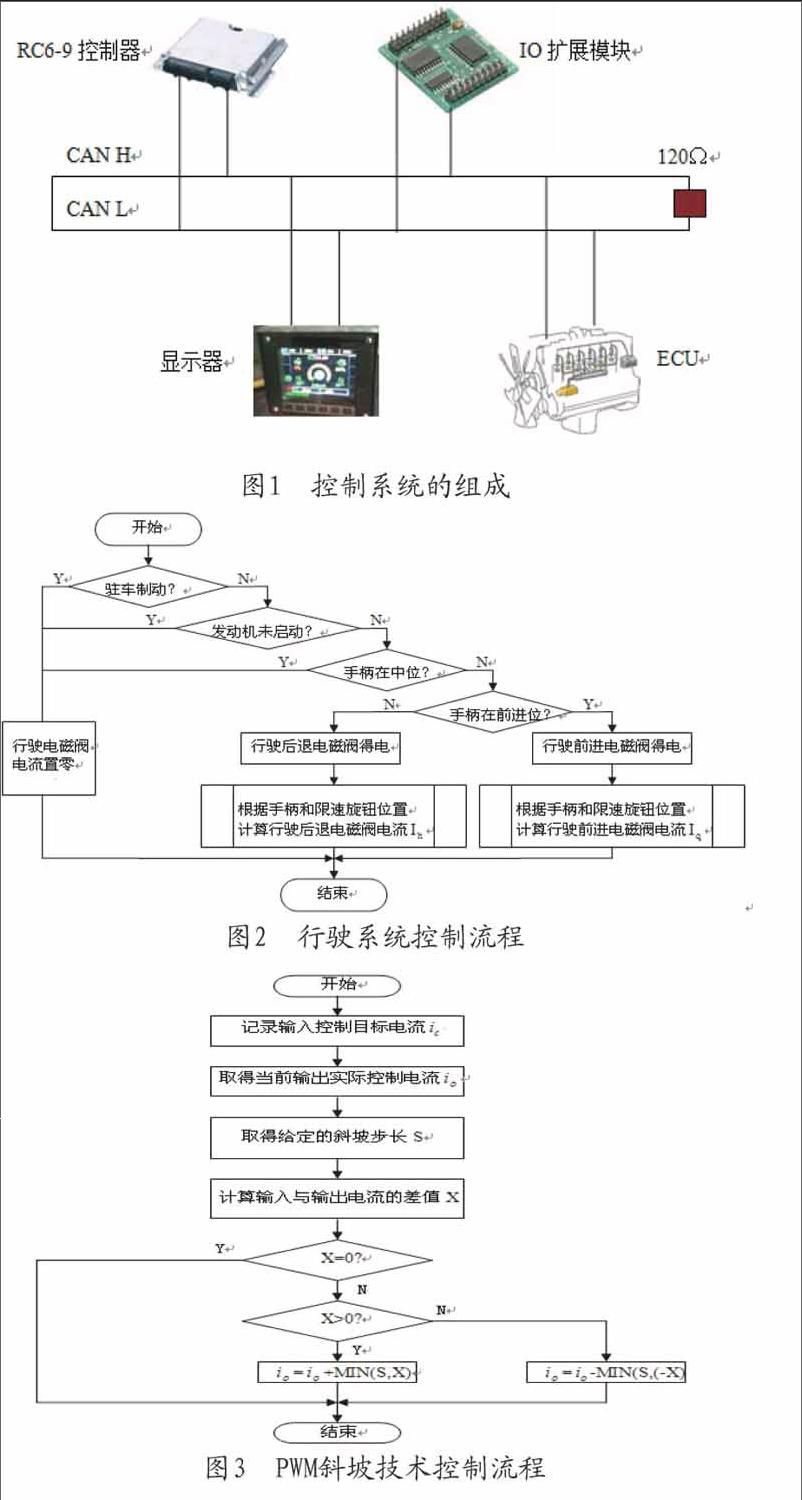
整个控制系统通过CAN总线连接而成。具体的组成如图1所示。
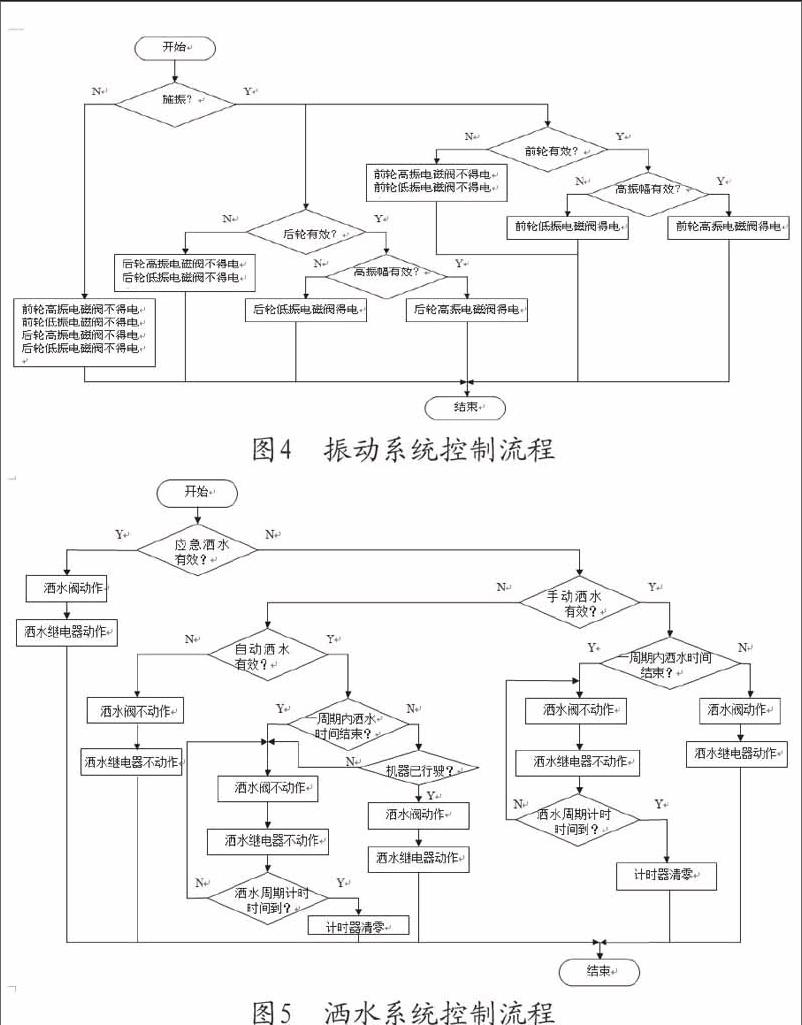
2.2控制方法研究
根据控制系统的功能需求,对行驶系统、振动系统、洒水系统等关键系统的控制方法进行研究,其中图2为行驶系统的控制流程图,图3为PWM斜坡技术的控制流程图,图4为振动系统的控制流程图,图5为洒水系统的控制流程图。
3试验
3.1试验目的
运用BODAS2.0软件对控制系统进行模拟调试,查看是否读入所有信号,对控制系统功能进行测试,看能否达到预期目标。
3.2试验主要设备
试验的主要设备:32位输入输出试验板、220v电源、实验专用Pc机、普通万用表、CAN总线与Pc机USB连接的转换卡以及RC6-9控制器。具体连接如图6所示。
3.3试验的内容以及结果
对样机进行了模拟调试,其调试的主要内容以及结果如表2所示。
3.4模拟实验结论
分析模拟实验的结果,得出以下结论:
1)各个输入输出信号的参数设置较为合理。
2)控制系统各部分工作正常。
3)控制系统的预设功能基本得到实现。
4结论
本文对双钢轮振动压路机进行了控制系统的硬件选型,提出了一些控制方法,并进行了模拟试验研究,验证了控制系统功能的合理性。
