偏心安装的导引头隔离度测量值的修正*
2017-01-03杨勇
杨 勇
(中国西南电子技术研究所,成都 610036)
偏心安装的导引头隔离度测量值的修正*
杨 勇**
(中国西南电子技术研究所,成都 610036)
针对偏心安装条件下导引头隔离度的测量偏差问题,介绍了一种导引头隔离度测量值的修正方法。构建了导引头在转台上偏心安装条件下的数学模型,推导了偏心安装引起的导引头输出角速度偏差,分析了这种偏差对导引头隔离度测量的影响,最后给出了一种导引头隔离度测量值的修正方法。仿真和测试证明了该方法的可行性,这对解决雷达导引头高精度指标测量问题具有重要指导意义。
雷达导引头;偏心安装;隔离度测量值修正;扰动频率;角速度误差
1 引 言
雷达导引头是引导导弹跟踪和捕获目标的高精度传感器,但是由于导弹在飞行中会受到空气阻力,引起弹体剧烈振荡,从而导致雷达波束发生偏移和摆动,甚至丢失目标。为克服弹体扰动影响,通常的雷达导引头稳定方法采用二轴两框架稳定方法,利用陀螺的惯性速率测量功能构成稳定回路来去除弹体扰动并跟踪目标。因此,导引头对弹体扰动的去耦能力是导引头的重要指标之一,它将直接影响导引头角速度测量精度[1-2]。常规的隔离度测量方法是利用雷达导引头、转台、目标模拟器和暗室环境构成系统跟踪回路,采用转台模拟弹体扰动进行测试[3-5]。这种方法需要将雷达导引头通过结构工装安装在转台上,由于转台模拟的弹体扰动角速度较大,因此,结构工装一般将导引头的质心设计在转台中心上,从而满足转台在高速摆动过程中保持力矩稳定,这就产生了一个雷达导引头天线旋转中心与转台中心的安装偏差,即偏心距。由于暗室中目标模拟器到雷达导引头的距离一般远大于偏心距,因此在导引头的隔离度指标要求不高的条件下,这种测试方法可满足指标要求。但是,随着导引头精度的提升,对隔离度的要求也越来越高,上述不考虑安装偏心距的常规测试方法已经无法满足隔离度测量精度的要求。为此,本文构建了雷达导引头在转台上偏心安装条件下的数学模型,推导了偏心距所引起的雷达导引头输出角速度误差,并分析了该角速度偏差对导引头隔离度的影响,最后给出了导引头隔离度的补偿方法。仿真和试验结果表明该方法补偿了偏心距对系统隔离度的影响,可以满足当前导引头隔离度的高精度测量要求。
2 隔离度定义及其测试系统
隔离度γ定义为天线电轴指向转动角速度与弹体转动角速度之比,隔离度越小,表明稳定系统对弹体扰动的隔离能力越强。由于介绍隔离度的理论模型及定义文章较多[6-7],这里就不再赘述,本文主要从测试系统角度对隔离度进行定义和分析。
理想隔离度测试系统如图1所示,由雷达信号模拟源、扰动转台、导引头、数据采集系统和暗室环境组成。雷达信号源产生目标模拟信号,导引头接收该辐射信号,对其进行信号处理并通过随动系统使电轴始终保持指向目标;扰动转台模拟弹体扰动;数据采集系统记录转台和导引头输出角速度数据;暗室环境为雷达信号模拟器向导引头辐射模拟信号电磁波传播的空间,同时屏蔽外界的干扰,为导引头提供一个静区空间。导引头安装在扰动转台上,且导引头的天线转动中心与扰动转台的转动中心重合。
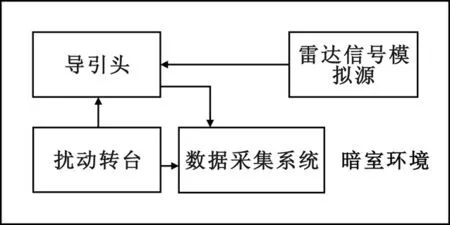
图1 理想隔离度测试系统
Fig.1 The ideal system for isolation test
隔离度的测试方法是:扰动转台模拟弹体在飞行状态的扰动,扰动转台在水平方向作正弦摆动;目标不动,导引头处于目标跟踪状态;启动扰动转台,在水平方向以规定的频率和摆幅摆动,导引头稳定回路对扰动起去耦作用,角跟踪回路保持电轴始终指向目标。隔离度γ(f)按下式计算[8]:
(1)

扰动转台的模拟原理是通过控制扰动频率和扰动幅度的方法来达到弹体角扰动模拟的目的。扰动转台模拟方法较为简单,通常是由超低频正弦信号发生器经随动系统驱动扰动转台往复运动。通过调节正弦信号的频率和幅度,可以模拟导引头承受导弹弹体扰动。假设θ(t,f)为扰动转台转动角,b(t,f)为导引头天线转动角,θ(t,f)和b(t,f)可分别表示为
θ(t,f)=Asin(2πft+φ),
(2)
b(t,f)=Bsin(2πft+φ)。
(3)


(4)

(5)
由式(1)隔离度定义,可知最大隔离度ζ为
(6)
3 考虑偏心距的隔离度模型
实际隔离度测试系统必须考虑偏心距安装误差(如图2所示),根据在实际系统中导引头、雷达信号模拟源以及扰动转台形成的三角几何关系可知若不存在安装偏心距,则导引头的理想隔离效果应使得在转台扰动过程中导引头天线指向始终保持初始天线指向方向。图2中R为雷达信号模拟源到导引头天线面的距离,r为导引头在扰动转台上的安装偏心距。
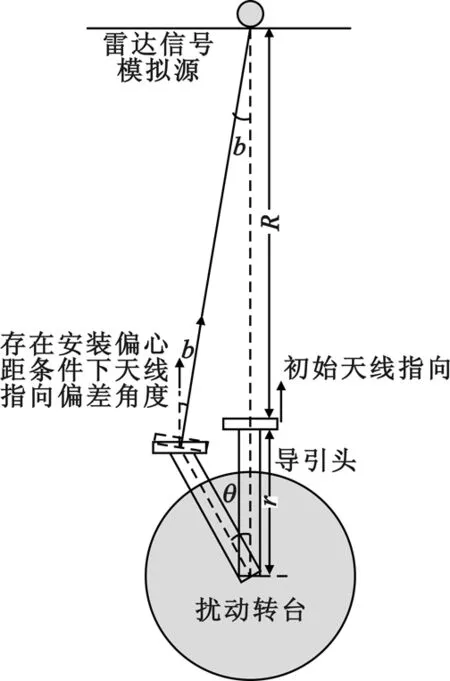
图2 考虑偏心距误差的隔离度测试系统
Fig.2 The isolation test system with a centroid offset
但由于安装偏心距r的存在,使得在理想隔离条件下,导引头也必然产生一个天线指向偏差角度b(t,f)。令k=R/r,ϖ=2πf,其可表示为
(7)
式(7)两边对t求导,可得
(8)
其中:
(9)
(10)
(11)

由式(8)可知,这种偏心距引起的扰动角速度可由雷达信号模拟源到导引头天线面的距离R、偏心距r和转台频率f等已知的测试常量表示,并唯一确定。因此,只要利用式(8)对测试获得的导引头角速度数据进行修正,就可得到真实的隔离度测试结果。
4 仿真、试验结果及分析
假设雷达系统隔离度测试的仿真环境如图2所示,其中R=7.6 m,偏心距r=0.01 m,扰动转台转动频率f=1 Hz,转台转动最大幅度A=14°,数据采集系统的采样时间Ts=1 ms。上述仿真环境和参数均为常规导引头测试环境及参数。
导引头隔离度仿真结果如图3~5所示。图3和图4分别为转台角速度和偏心距引起的导引头角速度,由两图曲线对比可知后者在相位上滞后于前者180。图5为偏心距引起的导引头隔离度结果,最大隔离度值为0.131 6%,且该极值出现在扰动转台和导引头角速度输出曲线波峰或波谷处。

图3 转台角速度
Fig.3 The angle-velocity of turntable

图4 偏心距引起的导引头角速度(仿真)
Fig.4 The simulated angle-velocity of seeker installed with a centroid offset

图5 偏心距引起的导引头隔离度
Fig.5 The isolation of seeker caused by the centroid offset
针对上述隔离度仿真系统,令导引头安装在转台上的偏心距r=0.01 m保持不变,转台的转动频率由1 Hz开始,按1 Hz步进递增到10 Hz,则导引头隔离度仿真结果如图6~8所示。图6和图7分别为转台和偏心距引起的输出角速度最大值随频率的变化结果,图8为偏心距引起的导引头隔离度随频率的变化结果。由图6和图7可以看出,虽然转台和导引头的角速度最大值均随频率的增大而增大,但是其隔离度输出则始终保持不变(ζ=0.131 6%)。由此可知,偏心距引起的导引头隔离度最大值与转台转动频率无关。
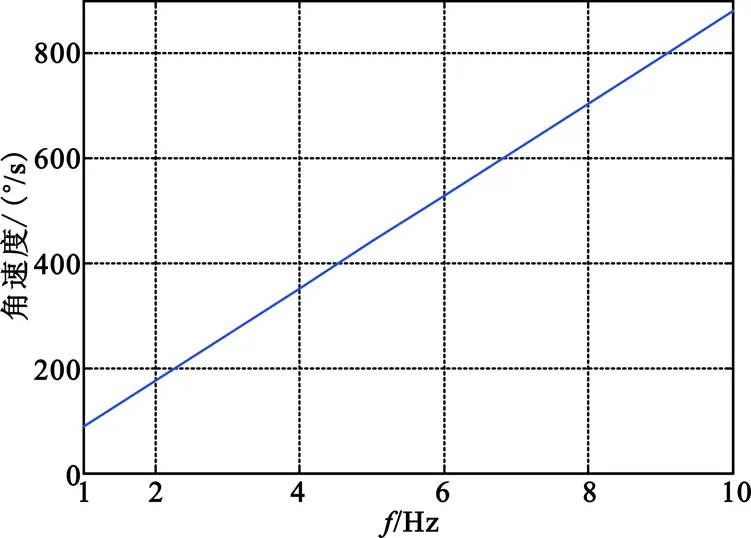
图6 转台角速度最大值随频率的变化
Fig.6 The angle-velocity maximum value of turntable with frequency variation

图7 偏心距引起的角速度最大值随频率的变化
Fig.7 The angle-velocity maximum value caused by the centroid offset with frequency variation
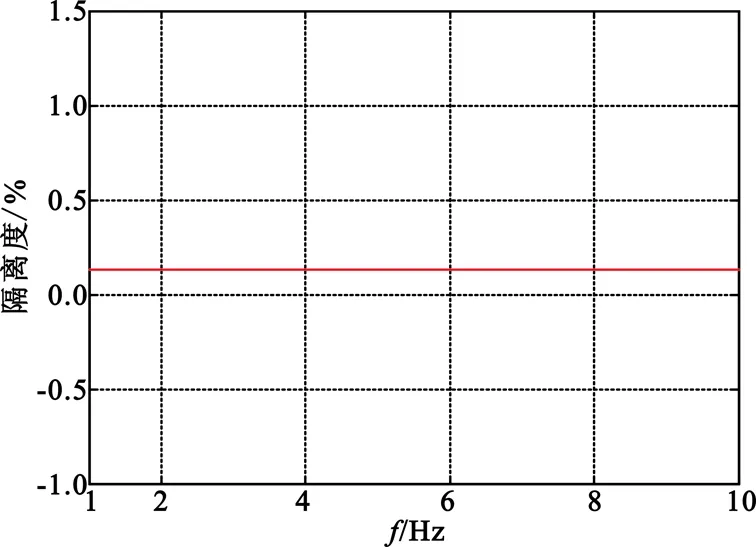
图8 偏心距引起的隔离度随频率的变化
Fig.8 The isolation caused by the centroid offset with frequency variation
同样,令转台的转动频率f=1 Hz保持不变,导引头安装在转台上的偏心距由r=0.01 m开始,按0.01 m步进递增到0.1 m,则导引头隔离度仿真结果如图9所示。从图9可知,安装偏心距越大,则其引入的导引头隔离度偏差越大,偏差值在0.131 6%~1.31 6%之间,又因为常规导引头的隔离度指标要求为2%~3%,因此,如果不严格控制偏心距,将会极大影响导引头隔离度指标的测试精度。必要时,需要针对偏心距引起的导引头隔离度进行补偿。

图9 导引头隔离度随偏心距的变化
Fig.9 The isolation of seeker with centroid offset variation
采用上述方法对某雷达导引头样机进行系统隔离度测试,测试参数如下:R=7.6 m,偏心距r=0.01 m,扰动转台转动频率f=1 Hz,转台转动最大幅度A=14°,数据采集系统的采样时间Ts=1 ms。导引头隔离度测试结果如图10所示,其中导引头输出角速度测试曲线存在大量噪声和毛刺,经低通滤波处理后可得导引头系统隔离度测试结果为2.59 5%。利用本文提出的偏心距模型可得偏心距引起的角速度输出曲线如图11所示,通过计算可得偏心距所引起的隔离度为0.134 1%。由图10和11可知,在实际测试过程中,由于真实测试设备与理论仿真存在一定误差,实际偏心距引起的角速度与转台角速度在相位上基本不存在滞后,因此,可以认为偏心距引起的角速度均正向叠加到导引头输出角速度上,从而导致导引头的输出角速度偏大,隔离度指标变差。由于这里得到的偏心距引起的角速度为复数,并与导引头角速度存在明确的幅度和相位关系,因此可在时域直接相减进行补偿。图12所示为转台和补偿后的导引头输出角速度,在补偿偏心距引起的角速度后,导引头隔离度为2.517%。由此可知,采用本文提出的偏心距模型可有效补偿导引头输出角速度偏差,提高导引头隔离度测试指标精度。
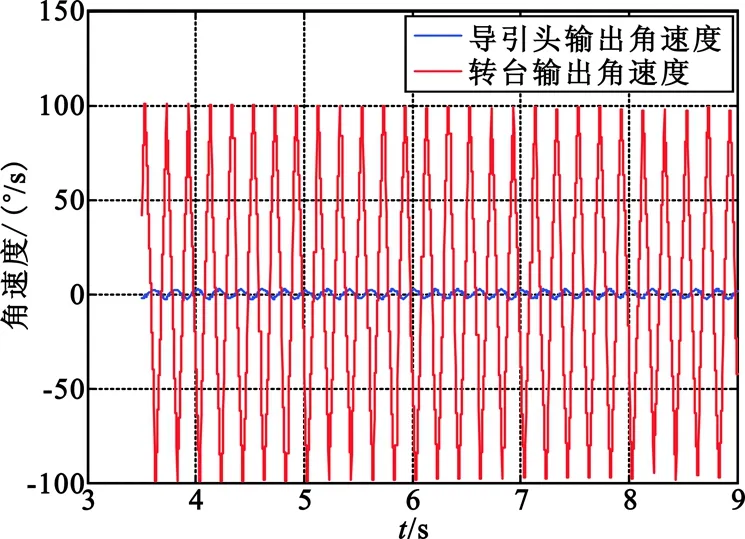
图10 导引头和转台的角速度
Fig.10 The angle-velocities of turntable and seeker

图11 偏心距引起的导引头角速度(实测)
Fig.11 The measured angle-velocity of seeker caused by the centroid offset

图12 转台角速度和补偿后的导引头角速度
Fig.12 The angle-velocity of turntable and angle-velocity by compensating of seeker
5 结 论
本文介绍了一种在雷达导引头隔离度测试过程中的测量值补偿方法。该方法构建了雷达导引头在转台上偏心安装条件下的数学模型,定量分析了偏心距对雷达导引头隔离度测试的影响。从仿真和实际试验结果来看,该方法可有效补偿偏心距引起的角速度偏差,提高导引头隔离度测量精度,这对解决雷达导引头高精度指标测量问题具有重要指导意义。
[1] 周桃品,李友年. 导引头隔离度对制导系统影响研究[J]. 航空兵器,2013(1):32-35. ZHOU Taopin,LI Younian. Effect of seeker disturbance rejection rate on guidance system[J]. Aero Weaponry,2013(1):32-35.(in Chinese)
[2] 徐平,王伟,林德福. 导引头隔离度对末制导炮弹制导控制的影响[J]. 弹道学报,2012,24(1):17-21. XU Ping,WANG Wei,LIN Defu. Effect of seeker isolation on guidance and control of terminal guided projectile[J]. Journal of Ballistics,2012,24(1):17-21.(in Chinese)
[3] 刘正云,苏建刚. 瞄准线稳定精度的室内测试技术[J]. 光学精密工程,1999,7(5):96-99. LIU Zhengyun,SU Jiangang. Indoor measurement techniques for the stabilizing accuracy of aiming line of image stabilizer[J]. Optics and Precision Engineering,1999,7(5):96-99.(in Chinese)
[4] 张安锋. 光电稳定系统的稳定精度测试研究[D]. 长春:长春理工大学,2003. ZHANG Anfeng. Stabilization accuracy test of O-E stabilized system[D]. Changchun:Changchun University of Science and Technology,2003.(in Chinese)
[5] 赵桂军,吴晔,成志锋,等. 导引头伺服系统去耦系数的自动化测试方法[J]. 制导与引信,2009,30(3):11-15. ZHAO Guijun,WU Ye,CHENG Zhifeng,et al. The automatic test method of decoupling coefficient for seeker servo system[J]. Guidance and Fuze, 2009,30(3):11-15.(in Chinese)
[6] 赵超. 导引头稳定系统隔离度研究[J]. 光电与控制,2008,15(7):78-82. ZHAO Chao. Study on disturbance rejection rate of a seeker servo system[J]. Electronics Optics and Control, 2008,15(7):78-82.(in Chinese)
[7] 杨黎都,高向东,郑星,等. 射频仿真系统三轴模拟转台动态误差分析[J]. 电讯技术,2012,52(7):1198-1201. YANG Lidu,GAO Xiangdong,ZHENG Xing,et al. Dynamic error analysis of three-axis simulation rotating platform based on RF simulation system[J]. Telecommunication Engineering,2012,52(7):1198-1201.(in Chinese)
[8] 吴雪芳. 通用伺服系统隔离度测试方法的研究[D]. 成都:电子科技大学,2012. WU Xuefang. Universal servo system isolation of testing method study[D]. Chengdu:University of Electronic Science and Technology of China,2012.(in Chinese)
YANG Yong was born in Fushun,Liaoning Province,in 1978. He received the Ph.D. degree from Wuhan University in 2006. He is now a senior engineer. His research concerns radar signal processing and image processing technology.
Email:25600073@qq.com
Revising of Measurement Isolation Value of Seeker Installed with a Centroid Offset
YANG Yong
(Southwest China Institute of Electronic Technology,Chengdu 610036,China)
The measured values from the isolation of seeker installed with a centroid offset commonly have bias. A data correcting method of the measurement isolation values of seeker is presented.The mathematical model of seeker installed on the turntable with a centroid offset is established. The angle-velocity errors caused by the centroid offset installation are derived for analyzing the influence of the angle-velocity errors on the measurement values of seeker. Finally,a revising method is given. Computer simulation and test result verify the feasibility of the proposed method. It is instructive for practical project in which missile tracks surface targets.
radar seeker;centroid offset installation;measurement isolation value revising;disturbance frequency;angle-velocity error
10.3969/j.issn.1001-893x.2016.12.006
杨勇.偏心安装的导引头隔离度测量值的修正[J].电讯技术,2016,56(12):1335-1339.[YANG Yong.Revising of measurement isolation value of seeker installed with a centroid offset[J].Telecommunication Engineering,2016,56(12):1335-1339.]
2016-03-02;
2016-08-10 Received date:2016-03-02;Revised date:2016-08-10
TN953
A
1001-893X(2016)12-1335-05

杨 勇(1978—),男,辽宁抚顺人,2006年于武汉大学获博士学位,现为高级工程师,主要从事雷达信号处理、图像处理等方面的研究工作。
**通信作者:25600073@qq.com Corresponding author:25600073@qq.com
