六点支撑自动调平系统关键技术研究
2017-01-03陈建平
汤 辉,陈建平
(中国电子科技集团公司第三十八研究所 机械传动与控制工程实验室,合肥230088)
六点支撑自动调平系统关键技术研究
汤 辉,陈建平
(中国电子科技集团公司第三十八研究所 机械传动与控制工程实验室,合肥230088)
对车载自动调平系统进行了详细的描述与讨论。列举了目前典型自动调平系统的类型和特点,通过对六点自动调平系统的受力模型分析,得出了车载上装设备的结构布局设计的指导原则。重点研究了六点支撑共同参与调平过程的控制策略,并通过设计实例归纳了撑腿在自动调平过程中伸长量的计算方法。对自动调平系统中的关键技术如虚腿、安全性等问题也进行了梳理和总结。
车载自动调平系统;六点支撑;静不定;虚腿
0 引 言
自动调平系统在车载军事装备和工程机械中有着广泛的应用。随着调平对象规模的不断增大和调平精度的提高,调平支撑从三点发展到四点、六点甚至更多。众所周知,三点确定一个平面,所以三点支撑不但可以确定一个平面,而且可以保证每条支腿的受力状态的重复性,是控制策略最容易实现的支撑方式。但是,考虑实际装备的稳定性、抗倾覆性以及单腿承载力的有限性,四点调平和六点调平在工程中却有着大量的应用,尤其是四点调平是当前主流装备普遍采用的形式。当然,由于四点调平是一次超静定系统,提高刚度和稳定性是以增加静不定次数、加大控制难度为代价的。目前工程实际中已经成功解决了由于超静定问题带来的耦合和虚腿问题,一种方法是将四条调平支腿解耦为两个方向,在两个方向上分别布置水平传感器,检测水平度,通过两个方向的调平实现平台调平,即在一个方向调平平台,然后锁定该方向的水平度,再调平另外一个方向,可重复多次调节,遵守只升不降的原则;另外一种是通过建立平台调节控制的数学模型,同时调节四条支腿,实现对平台的水平调整。当平台需要更好的刚性和更高的调平精度时,六点支撑则成为可选的手段。六点支撑是一个三次超静不定系统,系统的控制策略设计和稳定性控制难度更高。所以,目前在实际工程中大多采用以其中两个支点为辅助支撑,实际参与调平的依然是四个支撑点。而这种调平方法对单腿的动态承载力提出了很高的要求,尤其是平台上装质量不断增大、撑腿安装空间无法增加的情况下四点调平+两点辅助的方法已很难满足系统要求。六点支撑共同参与调平是必然趋势,对六点支撑自动调平系统中关键技术的研究则非常必要。
1 模型分析
为了各撑腿能够平均承担上装质量,需要对平台上装的质心进行布局。所以,首先需要对平台系统进行静力学建模,以此从理论上保证支腿的受力能调整到基本一致,尽量降低单腿的最大承载载荷,以降低撑腿的设计难度。图1为平台简图。
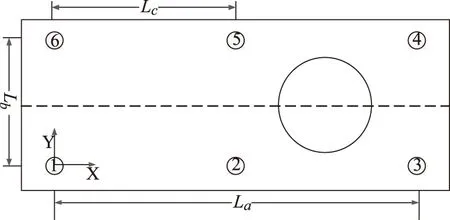
图1 平台简图
本文对平台系统的静力学模型进行分析,分析过程作出如下假设:
(1) 地面是绝对刚性的;
(2) 平台是绝对刚性的;
(3) 平台支撑的弹性变形满足虎克定律。
如图1,平台上六个支撑点的坐标分别为(0,0)、(Lc,0)、(La,0)、(La,Lb)、(Lc,Lb)、(0,Lb),总质量为M,重力作用点的坐标为(Lx,Lb/2)。当平台处于水平状态时,支撑的内力和变形满足静力学方程。由力平衡可得:
F1+F2+F3+F4+F5+F6=9.8M
由力矩平衡可得(以3和4支点连线为支撑):
F1*La+F2*(La-Lc)+F5*(La-Lc)+F6*La
=9.8M*(La-Lx)
其中,F1~F6为支腿1~6的受力;Lx为上装质量质心距离1腿的X轴向距离;La为3、4腿距离1腿的X轴向距离;Lb为4、5、6腿距离1腿的Y轴向距离;Lc为2、5腿距离1腿的X轴向距离。
一般情况下,上装质量质心在车辆平台的Y轴向中心,即支腿1、2、3和支腿4、5、6受力情况相同,F1=F6,F2=F5,F3=F4,那么上式可以分别变换成:
F1+F2+F3=4.9M
F1*La+F2*(La-Lc)=4.9M*(La-Lx)
系统设计要求F1=F2=F3=9.8 M/6,通过上述计算可得Lx=(La+Lc)/3。
因此,为了保证六点支撑调平系统的各撑腿受力均匀一致,在载车平台长度一定的情况下,需要从上装质量质心和中间两个撑腿的位置布置着手,尽量使得各撑腿受力均匀。
2 调平策略
调平策略与驱动形式没有必然关系。本文仅从控制算法角度去讨论在六点支撑系统中调平策略的选择问题。目前,在车载调平系统中,调平控制策略主要分为两种:角度误差控制调平法和位置误差调平法。
角度误差控制调平法以双轴水平传感器的测量值为依据,与撑腿驱动形成闭环控制,通过两个方向先后独立多次循环调整,达到解耦和调平的目的。该方法的优点是不需要掌握撑腿和水平传感器的具体安装位置和相互关系,且撑腿的伸出行程计算功能也没有强制要求,算法简单。它的缺点是调平时间慢,且仅适用于三点或四点调平系统,无法满足六点调平系统多点共同参与调平的要求。
位置误差调平法的控制原理是:在撑腿落地完成后,以某一条撑腿为基准,保持该撑腿不动,根据调平撑腿和水平传感器的安装位置关系尺寸和当前水平传感器的测量值,计算出其他撑腿的伸长量或收回量,控制撑腿执行相应的伸缩量,完成调平。该方法的优点是适用于任意数量支撑腿的调平系统,且调平时间快。它的缺点是控制系统需要掌握支撑点和传感器的位置关系,软件算法复杂,调平撑腿要求具备行程计算功能,调平精度受到系统刚性、传动间隙以及安装尺寸误差等因素的影响,当然也可以通过闭环修正弥补上述误差带来的影响。本文根据六点支撑调平系统的特点,选择位置误差调平法中的“追高法”进行讨论。“追高法”即保持落地后调平撑腿中的追高点不同,其他支撑点向上运动与之对齐,当各点达到最高点位置时平台即处于水平状态。这种方法能在一定程度上解决虚腿的问题[1]。
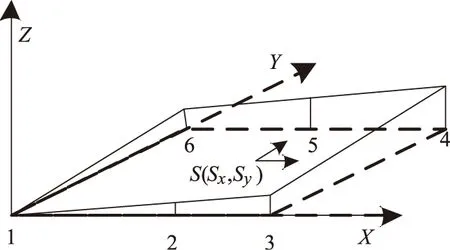
图2 六点调平“追高法”撑腿伸长量计算示意
如图2所示,以水平传感器的安装位置处平面为调平对象,以撑腿1支点处为直角坐标原点,各撑腿的支点坐标为(Xi,Yi,Zi)(i=1,2,3,4,5,6),水平传感器安装位置的坐标为(Sx,Sy,Sz)。假设当前水平传感器的输出值为(Ax,Ay),撑腿落地完成后通过传感器的输出值可以容易地判断出最高点为4号支撑腿,则在接下来的调平程序中保持4号支撑腿不动,其余撑腿的伸长量计算如下[2](见图3)。
首先计算X方向上支腿5、6的伸长量:
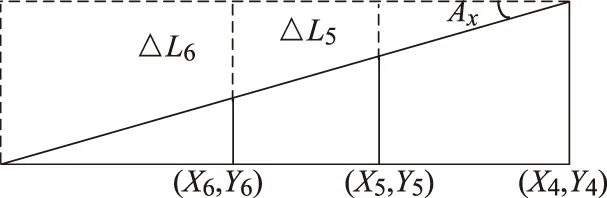
图3 X轴调平撑腿伸长量计算示意
由于△L5和△L6不影响Y方向的水平度,为了保持在调节X方向水平值时的Y向水平度,使撑腿1和2也相应地伸长△L5和△L6,则X向水平值调整完成。
接下来进行Y方向调节,伸长量计算如下(见图4)。
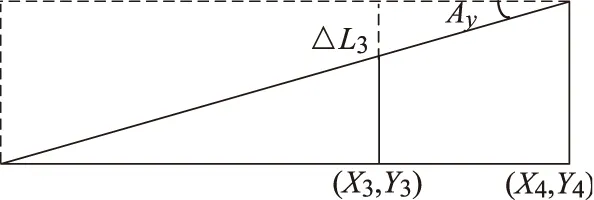
图4 Y轴调平撑腿伸长量计算示意
显然,撑腿1和2在Y方向调整中的伸长量也为△L3。
总结上述过程,则在撑腿落地完成后执行自动调平阶段各撑腿的伸长量分别为
△L1=X4×tanAx+Y4×tanAy
△L2=(X4-X5)×tanAx+Y4×tanAy
△L3=Y4×tanAy
△L4=0
△L5=(X4-X5)×tanAx
△L6=X4×tanAx
上述讨论建立在地面和平台均是绝对刚性的前提下,而这种假设在实际工程中却是不可能完全满足的。为了解决这种非刚性对调平策略和调平精度的影响,可以采用多次反复调整的方法克服其带来的影响。
3 虚腿问题
“虚腿”问题是自动调平系统关键技术研究的重点,也是工程化实现中必须要面对和解决的难题。引起虚腿的根本原因在于四点或六点自动调平系统是一个典型的超静定系统。盛英等在《6腿支撑液压式平台自动调平算法》一文中提出了参照Stewart并联机构[3],将高次静不定平台结构转化为静定结构,避免了虚腿问题。但是,该方案在工程中应用案例极少。施勤等在《基于油压检测的雷达车全自动调平策略》一文中提出在自动调平系统中基于油压检测原理解决虚腿支撑的策略[4],也讨论了油压检测中普遍遇到的工程难题,如环境温度的影响、结构因素的影响等,但所提出的解决办法只是起到改善或者提高的作用,并没有从根本上解决问题。另外,油压检测的方法只适用于液压式调平系统,机电调平系统则无法采用。目前,机电调平系统普遍采用的减小虚腿现象出现概率的方法是采用只升不降的调平策略,通过实时采集电机电流和多次循环调平的方法达到避免虚腿的目的。但是,该方法依然受到环境温度等客观因素的影响,且多次循环调平和只升不降的方法也使得系统的调节余量越来越小。
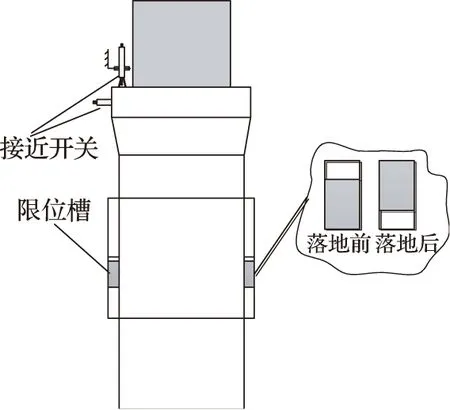
图5 调平撑腿落地检测原理
根据六点自动调平系统的特点,本文讨论一种新颖的落地检测的方法。通过该方法可以实时准确检测撑腿的落地情况,检测结果基本上不受其他因素的影响。无论是油压检测还是电机电流检测都是通过外部物理量的变化转换成电信号的变化来进行判断,而物理量即液压系统的压力或者电机转矩均会受到外部环境或者机械部分的不定因素的影响。如果落地检测或者虚腿检测能够直接通过机械结构的固定变化转换成开关量,则大大降低了外界因素的影响。在调平撑腿的设计中采用滑块限位结构,滑槽的长度比滑块的长度大2~4 mm。当撑腿落地受力后,只要克服撑腿自身的重量,即可推动滑块从滑槽的底部运动到顶部。由于检测距离的变化,引起了撑腿顶部接近开关点亮,指示撑腿落地完成。撑腿侧面的接近开关通过检测同轴安装在撑腿传动机构上的齿轮齿面进行开关计数,实现撑腿行程的实时监控,一方面作为调平策略的支撑,另一方面也可以防止撑腿伸出超出行程,同时也能够作为撑腿是否收回到位的检测条件。
显然,本文所讨论的撑腿落地检测方法克服了外部环境因素的影响,通过在撑腿落地前后机械结构上的变化实现落地检测或虚腿检测,只要撑腿的重量一致即可保证撑腿稳定可靠且重复性一致的落地检测性能。通过调节检测开关的检测距离,可以在一定范围内调节撑腿落地的受力程度,满足不同载车和产品的落地要求。另外,值得一提的是,该设计中所有的检测开关均布置在容易达到的地方,符合工程设计中维修性的要求,即方便维修更换又易于观察[5]。
4 安全性问题
这里要讨论的是除了第4条描述的“虚腿”问题以外带来的安全性隐患。车载自动调平系统一般上载重量较重,且上装设备体积和高度都比较大,一旦最基础的平台调平存在安全隐患,那么其对整个设备和人员的安全会带来极大的危害。为此,本文专门讨论自动调平系统普遍存在的安全性问题及应对措施。
水平传感器是自动调平系统的关键设备,围绕其展开安全性的讨论是必要的。水平传感器的故障大致会对系统带来两种可能,一是调平控制器接收到的水平值始终是零或极大值,另一种可能是传感器始终输出一个固定的有效值,但不随平台的运动而变化。无论是哪一种情况,在不同的调平策略中,如果不加以对水平值进行实时判断都会带来撑腿一直伸出,或者无法真正完成调平的故障出现,给上装设备带来安全隐患。为此,首先应该在调平控制程序中对接收到的水平值进行实时地判断。如果一旦水平值出现超出正常的预设范围,或者撑腿落地完成后继续伸出时水平值不会变化,均要求系统立即停止动作且声光报警输出提醒操作人员进行系统检查。
另一种故障现象与“虚腿”正好相反。当检测落地的接近开关损坏时,系统即失去了该条撑腿落地检测的功能,如果不设置保护措施,则该撑腿会一直伸出,直到行程超限为止。一旦出现这种情况,轻则无法完成正常调平,重则会造成整车的大角度倾斜,异常危险。针对这种情况的保护措施是,在执行落地过程中实时监控撑腿伸出行程,预设落地检测段的伸出行程最大值,一旦超出该值还没有完成落地检测就立即停止工作并报警输出。另外,根据对架设地形的要求,可以计算出各条撑腿落地阶段所用行程或者时间的最大间隔,根据其他撑腿的落地情况,也可以作为避免该撑腿出现上述情况的软手段。
第3种情况是当检测行程的接近开关损坏时,无法实时监控撑腿行程带来的影响。显然,这时会影响前面两种情况的保护措施的设置,也会带来无法实现撑腿收回到位的判断和伸出最大行程的保护等功能的失效。针对这种情况的保护措施是,在撑腿伸出或收回时,以一定的时间间隔判断行程计数值的变化,一旦发现撑腿动作一定间隔时间前后计数值没有变化,立即停止动作并报警输出。
5 结束语
六点自动调平系统在大型车载设备中的应用越来越普遍。笔者结合自己多年的工程经验,对工程化的车载自动调平进行了系统性的讨论和分析,其中重点阐述了六点支撑调平系统中上装质心与撑腿布局、撑腿伸长量、虚腿控制和安全性等实际工程问题的解决方法,对于相关工程技术人员具有一定的借鉴和参考意义。
[1] 姜伟伟,高云国,等. 大型光电设备基准平面自动调平系统[J]. 光学精密工程,2009,17(5):1039-1045.
[2] 李斌,李洪,等. 重载平台精确调平方法的研究[J]. 机械设计与制造,2008(9):99-101.
[3] 盛英,仇原鹰. 6腿支撑液压式平台自动调平算法[J]. 西安电子科技大学学报(自然科学版),2002,29(5):593-597.
[4] 施勤,岳振兴.基于油压检测的雷达车全自动调平策略[J]. 现代雷达,2010,32(10):73-76.
[5] 陆作其,单春贤,等. 车载雷达自动调平系统中虚腿的模糊控制[J]. 数学的实践与认识,2010,40(3):115-122.
Research on key technologies of an automatic leveling system with six legs
TANG Hui, CHEN Jian-ping
(Laboratory of Mechanical Transmission and Control Engineering,No. 38 Research Institute of CETC, Hefei 230088)
The vehicle-borne automatic leveling system is described and discussed in detail, and the types and characteristics of the current typical automatic leveling systems are listed. The guiding principles of the structure layout of the equipment on the leveling system are obtained through the force model analysis of the automatic leveling system with six legs. The control strategies of the automatic leveling system with six legs are studied emphatically, and the method of calculating the elongation in the leveling progress is concluded through the design instances. The key technologies such as the weak leg and the system safety are also summarized.
vehicle-borne automatic leveling system; six legs; static indetermination; weak leg
2016-09-10;
2016-09-27
汤辉(1980-),男,高级工程师,研究方向:雷达伺服系统研制开发;陈建平(1965-),男,研究员,研究方向:雷达结构总体。
TP271
A
1009-0401(2016)04-0060-04
