同类点匹配改进策略下的阴影自动补偿方法
2016-12-28万幼川高贤君
王 瑶,万幼川,高贤君
(1.武汉大学 遥感信息工程学院,湖武汉 430079)
同类点匹配改进策略下的阴影自动补偿方法
王 瑶1,万幼川1,高贤君1

提出一种基于ISoDATA分类,通过获取同质区来提高同类点匹配正确率的方法。首先进行阴影检测,然后对影像的阴影和非阴影区域用ISoDATA算法分类,在分类结果的辅助下获取精度较高的同类点对,最后基于局部补偿模型,以同类点对中非阴影区域特征值为目标估计值,求解补偿模型参数,实现各阴影区的自适应补偿。实验结果表明,该方法有利于求解最佳补偿参数,能更准确、均衡地恢复阴影区信息。
阴影检测;ISoDATA同类点匹配策略;局部补偿模型;阴影自动补偿
在遥感影像获取过程中,建筑物、树木、云等物体形成的阴影易造成影像中部分信息丢失,降低影像质量,不利于影像应用。因此,研究遥感影像的阴影检测与自动补偿方法对提高影像利用率、扩大遥感影像的应用范围具有重要意义。
阴影检测算法分为基于模型和基于阴影属性2 类[1-5]。基于模型的阴影检测方法需要辅助数据,计算量大、耗时长,有局限性;基于阴影属性的检测方法是利用阴影区域的光谱和几何特性来检测阴影,虽然检测结果不稳定但算法简单,广泛应用于单幅影像自动检测。传统的阴影补偿法包括直方图变换、边缘模糊Retinex法[6]、同态滤波法等,目前的阴影补偿方法有线性相关补偿法[7]、信息补偿法等[8],这些方法存在人工干预过多、自动化程度较低的问题。文献[9]提出的基于同类点匹配自动获取补偿模型参数的方法虽然可实现自动补偿,但仍然存在同类点匹配数量不均匀、精度偏低的问题,获取的补偿参数不稳定,影响补偿精度。
为了解决上述问题,本文提出ISoDATA同类点匹配策略,结合局部补偿模型,可以更准确地自动获取补偿模型参数,完成自动阴影补偿,更好地恢复地物真实的色彩、纹理等信息。
1 阴影自动补偿方法
本文采用基于阴影属性的检测方法获取阴影区域,在检测结果的基础上实现自动阴影补偿,其关键点在于阴影补偿模型选择和模型参数自动获取两部分。以局部补偿模型为基础,结合ISoDATA分类法在各阴影区和邻近非阴影区获取匹配精度较高的同类点,实现补偿参数的自动解算,完成相应阴影的自动补偿,恢复地物信息。
1.1 局部补偿模型
局部统计增强法是一种有效的图像增强方法,用于阴影补偿处理。文献[10]提出引入非阴影信息的局部补偿模型,如式(1)所示:

式中,g(i,j)、gc(i,j)分别为影像中像素(i,j)某特征分量的原始值和补偿值,mSD、σSD分别为阴影区域的亮度均值和均方差,mNSD、σNSD为邻近的非阴影区域的亮度均值和均方差。通过设置合理的补偿强度系数A,可以有效提升补偿效果。
1.2 模型参数自动求解策略
利用同类点匹配原理进行模型参数自动求解的方法是在阴影区和非阴影区中分别提取代表同类地物的大量点对[9],以非阴影点对应的特征值为阴影点的补偿目标估计值,结合补偿模型,可用于自动求解补偿模型参数。文献[9]利用相关系数法匹配同类点对时,由于阴影区域地物灰度值较接近、非阴影搜索窗口包含地物种类有限,易造成误匹配,降低匹配精度。为了改善这个问题,本文提出了ISoDATA同类点匹配策略,以实现更准确的自动补偿。
1.2.1 ISODATA同类点匹配策略
ISoDATA同类点匹配策略的原理是对影像的阴影区和非阴影区分别分类,以获取高可信度的同质区域[11]。由于不同地物的灰度大小定性关系一致,例如道路的灰度值高于树木的灰度值,阴影区和非阴影区的分类结果均可按灰度从小到大标记属性;再利用Harris算子提取特征点,基于相关系数法匹配同类点策略[9],以非阴影区特征点为搜索范围,计算匹配窗口中的特征点和阴影区域特征点的相关系数,相关系数最大者视为其匹配的同类点;然后对获取的同类点对进行筛选,判断每组同类点对的属性是否相同,若相同则保留,否则删除。利用ISoDATA同类点匹配策略可以得到数量合适、精度更高的同类点对。
遥感影像中阴影区亮度较低,地物类别亮度差异小,相关系数法同类点匹配策略直接提取阴影区特征点并用于后续的匹配,易造成误匹配,降低匹配可靠性。为了确保ISoDATA分类的精度,先对阴影区作亮度拉伸处理,扩大亮度差异。以城区影像图1a为例,在阴影检测的基础上对阴影区和非阴影区分别分类,如图1b、图1c所示,图1d为整体的分类效果图。表 1为分类精度表,阴影区和非阴影区的分类精度均超过85%,说明ISoDATA分类效果较好,可以作为同类点对的判断依据。
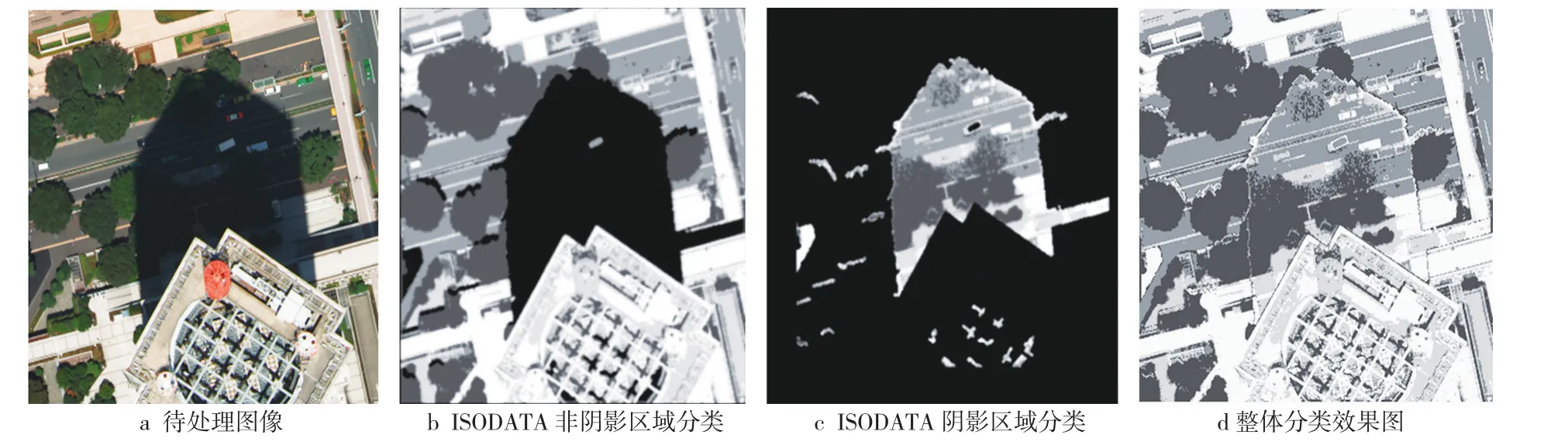
图1 分类结果图

表1 分类精度评价/%
利用Harris算子进行点特征提取,在阴影和非阴影区域获取类别丰富、数量较多的特征点;用相关系数法作为匹配原则获取大量特征点对,然后用ISoDATA分类结果判断点对在阴影和非阴影区域的属性编号是否相同,筛选得到数量合理、精度更高的同类点对。以图1a为例,本文将相关系数法和ISoDATA分类法得到的同类点对作精度评价(表2),结果说明ISoDATA分类法能有效地提高同类点对的匹配精度,特别是道路同类点的准确率有了大幅提高,为补偿强度系数的自动求解提供了良好的数据基础。
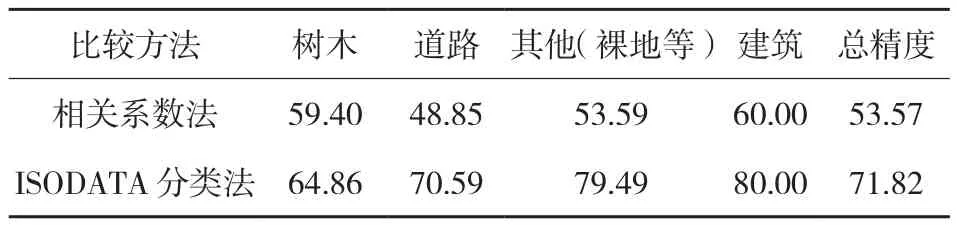
表2 同类点匹配精度评价/%
1.2.2 补偿强度系数求解
利用ISoDATA同类点匹配策略提高了同类点匹配精度,并获取大量准确的同类点对。以非阴影点特征值作为阴影点的目标补偿估计值,采用局部补偿模型,通过线性拟合,可求得补偿强度系数A。再代入式(1),对阴影区的I分量进行补偿计算,即可实现亮度分量上的自动阴影补偿。不同的同类点匹配策略会影响阴影补偿效果,对ISoDATA同类点匹配策略与相关系数法同类点匹配策略的补偿结果分别进行评估,可比较两种同类点匹配策略的可靠性。
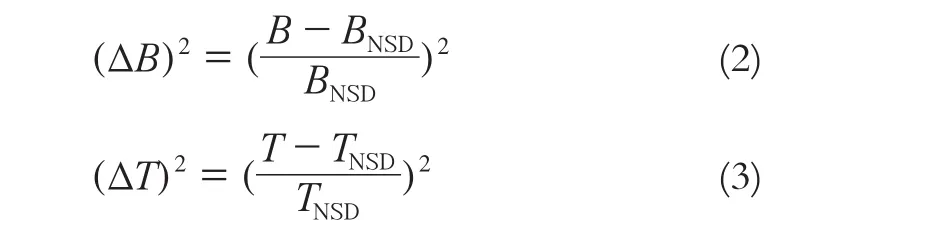
以反映图像明暗程度的亮度均值B与反映图像对微小细节反差表达能力的平均梯度T来构建补偿结果总体质量参数(∆B)2+(∆T)2[9],计算方法如下:
式中,B、T、BNSD、TNSD分别为阴影区域补偿后和非阴影区域的亮度均值与平均梯度。质量参数的值越小,说明补偿结果与非阴影区域质量越接近、效果越好。人工选取一定范围的补偿强度系数A,获取与其对应的总体质量,拟合得到关系曲线,如图2所示,总体质量最小值对应的A值即为理论上的最佳补偿强度系数值。对3个阴影区域进行实验,分别获取其最佳A值,并将ISoDATA分类法与相关系数法自动求解的A值进行对比,数据如表3所示。基于ISoDATA分类法自动获取的A值比相关系数法更接近数据拟合最佳值,说明ISoDATA分类法是一种更可靠的同类点匹配策略。
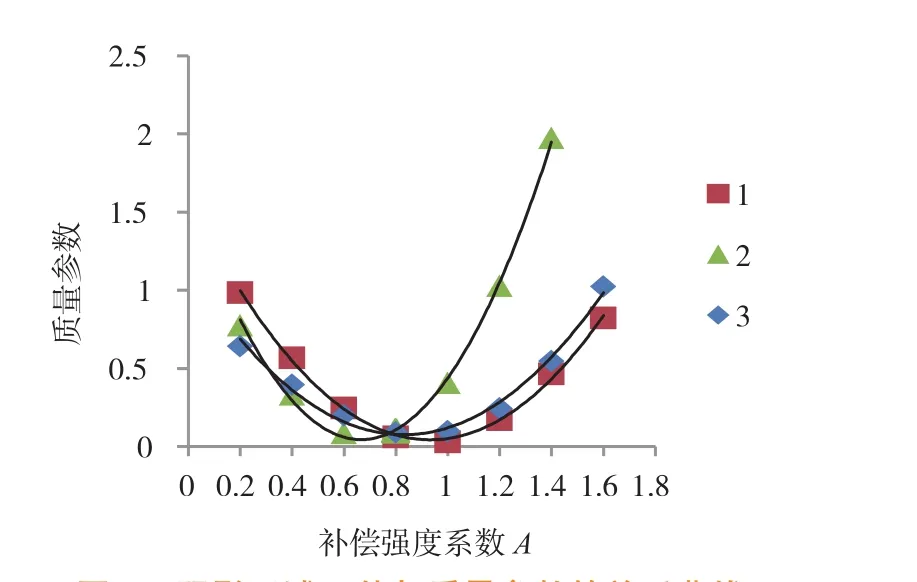
图2 阴影区域A值与质量参数的关系曲线
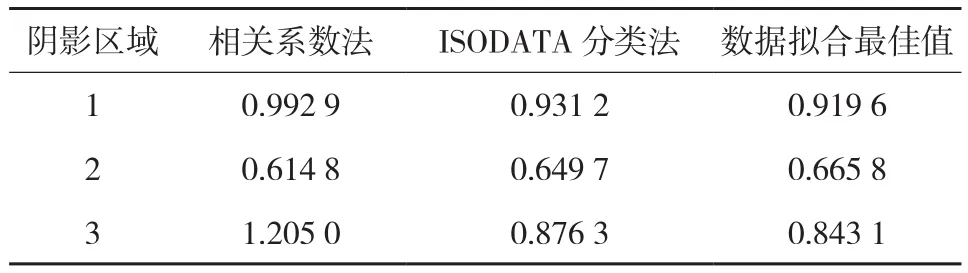
表3 阴影区域不同方法下的A值对比
1.3 自动补偿流程
基于ISDoDATA同类点匹配策略的单个阴影区域I分量补偿流程如图3所示,首先检测阴影区域,然后对检测出的阴影区域进行逐个补偿,得到I分量上的阴影补偿值,再转换到RGB空间,获取最终的阴影补偿结果。
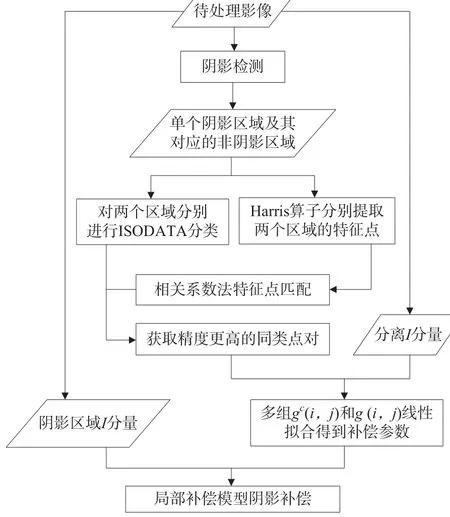
图3 单个阴影区域I分量补偿流程图
2 实验分析与评价
选取3幅影像,分别采取基于ISoDATA分类法和相关系数法两种同类点匹配策略进行阴影补偿对比分析,补偿效果如图4~6所示。对比发现,二者均能提升阴影区域的亮度,提高影像质量,但相关系数法补偿效果不稳定,会出现亮度低于目标值(如图4c)或高于目标值(如图5c)的情况以及色彩失真(如图6c)的问题,部分地物色彩偏差较大。ISoDATA分类法的阴影补偿效果更稳定,能较好地恢复阴影区域的地物信息,阴影区域色调与非阴影区域基本一致,补偿结果更接近地物真实情况。

图4 实验1阴影补偿效果
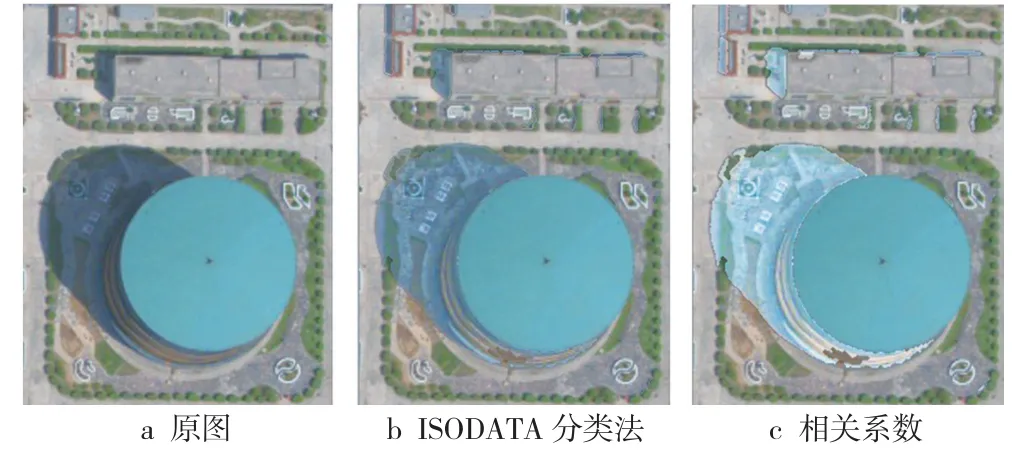
图5 实验2阴影补偿效果
从定量的数据分析,将阴影区补偿前后的亮度均值和平均梯度用总体质量参数(表4)对比发现,ISoDATA分类法与相关系数法均提升了阴影区的亮度,但相关系数法亮度补偿结果不稳定,而ISoDATA分类法得到的补偿结果与目标值更接近,质量参数更小,效果更好,更能有效地恢复阴影区域的地物信息。
3 结 语
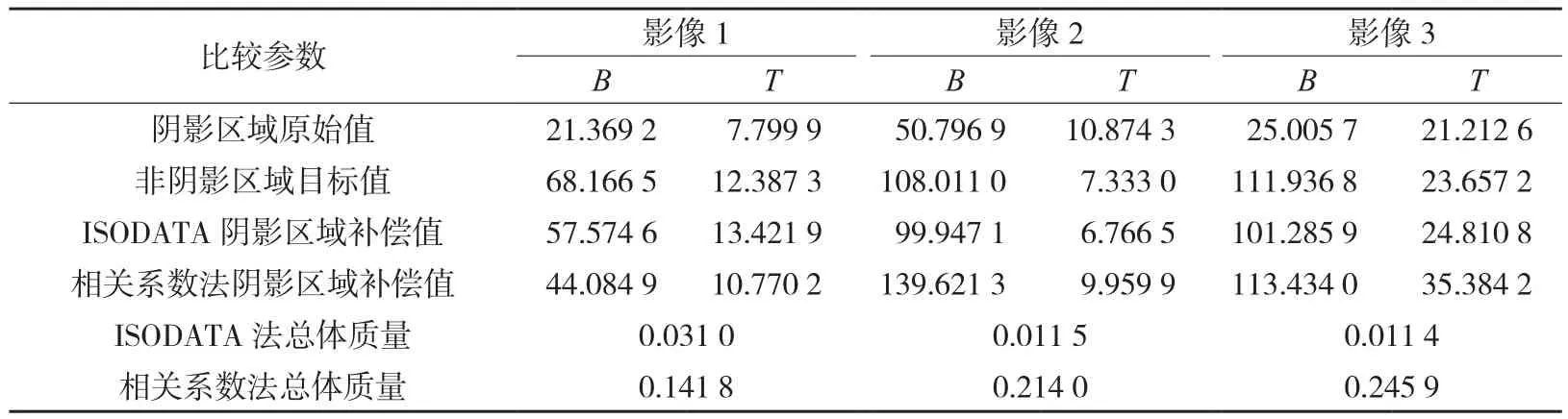
表4 阴影补偿结果评价
本文提出的ISoDATA分类法优点在于根据分类结果获取数量合适、精度较高、分类均匀的同类点对逐一对阴影区进行补偿,尽可能真实地反映地物信息,提高阴影区域自适应补偿效果;其缺点在于依赖分类结果的可靠性,决定同类点匹配的精度因素单一,要进一步提高分类精度需进行人工干预,影响阴影补偿自动化。
[1] 夏怀英,郭平.基于统计混合模型的遥感影像阴影检测[J].遥感学报,2011,15(4):778-791
[2] MAKARAU A, RICHTER R, MüLLER R,et al. Adaptive Shadow Detection using a Blackbody Radiator Model[J]. IEEE Transactions on Geoscience and Remote Sensing,2011,49(6):2 049-2 059
[3] AMATo A, MoZERoV M G, BAGDANoV A D,et al. Accurate Moving Cast Shadow Suppression based on Local Colot Constancy Detection[J].IEEE Transactions on Image Processing, 2011,20(10):2 954-2 966
[4] LIU J, FANG T, LI D. Shadow Detection in Remotely Sensed Images based on Self-adaptive Feature Selection[J]. IEEE Transactions on Geoscience and Remote Sensing,2011,49(12): 5 092-5 103
[5] 鲍海英,李艳,尹永宜.城市航空影像的阴影检测和阴影消除方法研究[J].遥感信息,2010(1): 44-47
[6] FINLAYSoN D,HoRDLEY S D,DREW M S,et al.Removing Shadows From Images Using Retinex[C].10th Color Imaging Conference: Color Science Engineering Systems, Technologies, Applications.2002
[7] FINLAYSoN G D, HoRDLEY S D, LU C, et al. on the Removal of Shadows from Images[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence,2006,28(1):59-68
[8] SoNG H, HUANG B, ZHANG K.Shadow Detection and Reconstruction in High-Resolution Satellite Images via Morphological Filtering and Example-Based Learningp[J].IEEE Transactions on Geoscience and Remote Sensing,2014,52(5):2 545-2 554
[9] 高贤君,万幼川,杨元维,等.高分辨率遥感影像阴影的自动检测与自动补偿[J].自动化学报,2014,40(8):1 709-1 720
[10] 杨俊,赵忠明,杨健.一种高分辨率遥感影像阴影去除方法[J].武汉大学学报(信息学科版),2008,33(1):17-20
[11] 舒宁,马洪超.模式识别的理论与方法[M].武汉:武汉大学出版社,2004
P237
B
1672-4623(2016)08-0017-03
10.3969/j.issn.1672-4623.2016.08.006
王瑶,硕士研究生,研究方向为遥感影像实时处理。
2015-11-11。
项目来源:博士点基金资助项目(20130141130003)。