基于有源阻尼注入的单逆变器多电机系统动态转矩平衡方法*
2016-12-28李春平宋文峰杨万清栾敬钊徐殿国
李春平,宋文峰,杨万清,栾敬钊,徐殿国
(1. 国家电网辽宁省电力有限公司, 辽宁 大连 116001;2. 哈尔滨工业大学 电气工程学院, 黑龙江 哈尔滨 150000)
基于有源阻尼注入的单逆变器多电机系统动态转矩平衡方法*
李春平1,宋文峰1,杨万清1,栾敬钊1,徐殿国2
(1. 国家电网辽宁省电力有限公司, 辽宁 大连 116001;2. 哈尔滨工业大学 电气工程学院, 黑龙江 哈尔滨 150000)
针对单逆变器多电机(SIMM)驱动系统动态转矩失衡问题,提出了一种基于有源阻尼注入的SIMM系统动态转矩响应方法。引入权值系数Km建立双永磁同步电机(PMSM)的等效加权数学模型,并基于该模型完成双机驱动系统最大转矩每安培曲线设计。但是,考虑到双机动态状态的不一致性,引入辅助的有源阻尼机制以提高系统动态稳定性。最后,基于双25kW PMSM调速系统试验平台进行验证与分析,包括:SIMM系统动、稳态特性及运行效率等多项测试。结果表明,所提有源阻尼机制对提升SIMM系统功率动态平衡具有理论意义和现实价值。
单逆变器多电机; 动态转矩; 有源阻尼; 加权模型
0 引 言
近年来由于多电机在造纸、纺织、炼钢、城市轨道交通等领域中的广泛应用,使得多电机的驱动技术成为研究热点[1-3]。对多机系统的研究通常被简化为对多个电机独立系统的研究。文献[4]基于最小相关轴数目的同步控制思想,解决了大型高精度、高转速传动系统的多电机同步控制问题。文献[5- 6]研究了两电机驱动的三相、四相、五相电压源逆变器的拓扑结构,并将其应用到多相电机的控制系统中。文献[7-8]将电压源逆变器的桥臂数推广到(2n+1),并提出n台电机驱动系统的拓扑结构。
单逆变器多电机(Single Inverter Multiple Motor, SIMM)驱动系统作为多机系统的重要发展方向,其在结构、成本、可靠性等诸多方面优势突出,已成为工业现场多电机驱动的重要解决方案之一[9-12]。但是,现有SIMM系统分析过程均建立在多电机等效稳态模型的基础上,应用场合也多为动态要求较低的工业场合。实际多机驱动系统运行过程中不可避免的存在负载差异性、电机参数不匹配等工况,如何建立适用于高性能矢量控制的SIMM系统模型,同时采取有效的技术手段提高双机驱动系统的动态稳定性意义显著[13-16]。
本文以低成本SIMM系统为研究对象。为了克服SIMM系统动态转矩失衡问题,提出了一种基于有源阻尼注入的SIMM系统动态转矩响应方法。首先,引入权值系数Km建立双永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)的等效加权数学模型,并基于该模型完成双机驱动系统最大转矩每安培(Maximum Torque Per Ampere, MTPA)曲线设计。但是,考虑到双机动态状态的不一致性,引入辅助的有源阻尼机制以提高SIMM系统动态稳定性。最后,基于双25kW PMSM调速系统试验平台进行验证与分析,包括:SIMM系统动、稳态特性及运行效率等多项测试。结果表明,所提有源阻尼机制对提升SIMM系统性能具有理论意义和现实价值。
1 SIMM系统加权数学模型
本文以双PMSM驱动系统为例研究SIMM系统一般特性。SIMM驱动系统结构示意图如图1所示。对于独立的三相理想对称PMSM驱动系统,可建立其两相旋转dq坐标系下的电压、转矩方程为
(1)
(2)
(3)
式中:ud、uq——d、q轴定子电压;
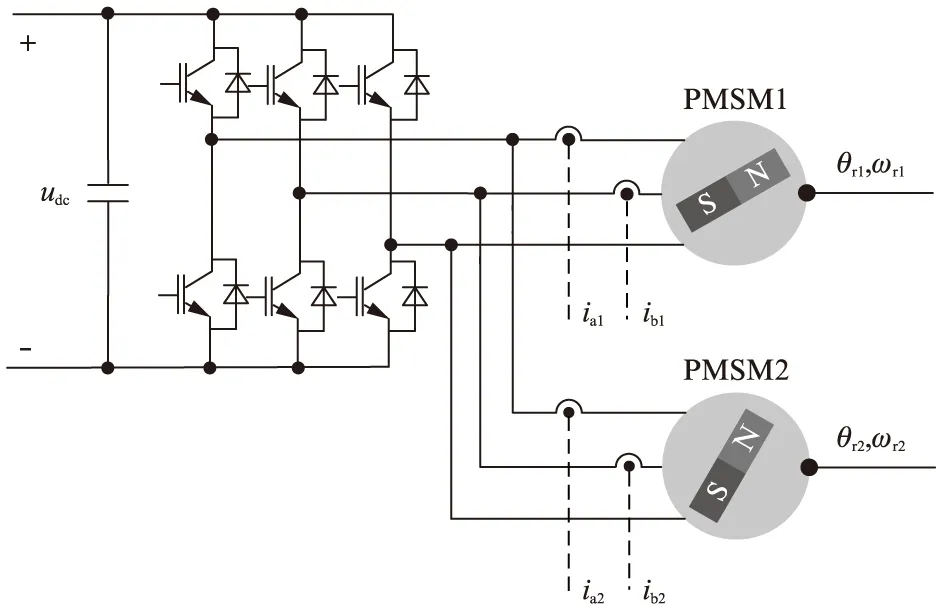
图1 SIMM驱动系统结构示意图
Ld、Lq——dq轴电感;
id、iq——dq轴定子电流;
p——电机极对数;
Ψm——永磁体磁链;
Te——电机电磁转矩。
SIMM系统建模的难点在于双机转子位置、负载特性、电机参数等均存在不一致性,为此本文引入加权系数Km进行双PMSM矢量控制系统定向角度、激磁电流、转矩电流修正。图2所示即为SIMM系统加权模型矢量描述结果。其中,在等效转子磁链dq坐标系下磁连、电流、角速度的加权值和误差值如下:
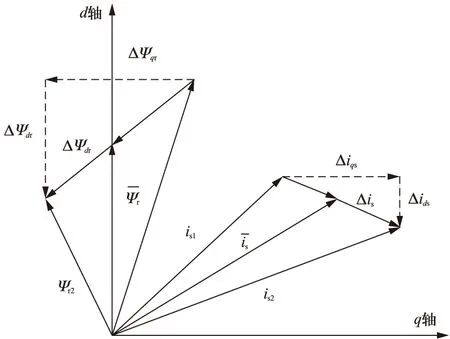
图2 SIMM系统加权模型矢量描述
(5)
(6)
(7)
式中:Ψr——双PMSM加权转子磁链矢量,其中d轴与加权转子磁链矢量Ψr同方向。
dq坐标系下转子磁链、电机电流矢量描述为
(8)
进一步建立双PMSM转矩方程为
Tsum=T1+T2=
[is+KmΔis]
(9)
至此,分析式(10)可知加权系数Km物理意义为在双PMSM负载不平衡情况下优化系统动态响应特性,故将其定义为
(10)
假设双PMSM驱动系统出现负载转矩不平衡现象,此时1号电机负载转矩突增即对应加权系数Km增加,此时双机矢量控制系统以1号电机为主电机控制,保证1号电机转速快速恢复其期望值。
2 SIMM系统MTPA原理
MTPA作为提高PMSM运行效率的一种有效方法,可根据负载转矩大小的变化完成PMSM磁场的主动调节,以获得一定电流幅值下的最大转矩输出。对于SIMM系统,考虑到双PMSM由同一逆变单元驱动,其定子端电压保持相同,即电压矢量幅值满足以下关系:

[Rsiq1+ωr(λf+Lsid1)]2=
(Rsid2-ωrLsiq2)2+
[Rsiq2+ωr(λf+Lsid2)]2
(12)
将式(3)进行简化分析可得
(13)

此外,考虑到逆变器功率单元最大输出电流限制,SIMM系统需满足以下电流限制约束,即
(14)
(15)
分析式(8)可知,对于期望的转矩电流iq1、iq2工作点存在多组(id1,id2)满足要求,此时引入双PMSM铜损方程,即
(16)
考虑到PMSM输出电磁转矩由实际负载转矩直接决定,即iq1、iq2由负载转矩直接决定。因此,将双PMSM驱动系统损耗模型简化为
(17)
至此,联立式(8)、式(12)构建拉格朗日极值方程为
(18)
式中:λ——拉格朗日约束因子。
对式(18)各变量进行偏微分处理得
(19)
当且仅当式(19)中拉格朗日微分方程均为零时,SIMM驱动系统为铜损最小的MTPA工作状态,即
(20)
图3即为对应式(20)的id1、id2坐标系下的稳态MTPA轨迹,其中:1号电机工作于变负载工况,2号电机工作于1p.u.额定负载工况。当SIMM系统运行于MTPA模式下时,1号电机空载工作点由A移至B。
3 有源阻尼注入动态功率平衡方法
前文给出了SIMM系统的MTPA工作原理,重点关注SIMM系统稳态运行效率。但是,对于负载大范围且频繁波动的工业现场,如何提高多机动态响应性能同样意义重大。考虑到多机系统动态状态的不一致性,以及不同电机之间的参数误差,传统矢量控制方法很难实现多机输出功率与负载转矩的快速匹配。SIMM系统往往需要经过多个时间基波周期才能实现负载转矩响应,基于加权数学模型的SIMM系统矢量控制方案虽可使系统趋于稳定,但其过长的动态调节时间成为限制SIMM系统向高性能场合应用的关键。

图3 id1、id2坐标系下的稳态MTPA轨迹
式(20)给出了SIMM系统MTPA运行轨迹下的双机d轴激磁电流关系,但双机又需要满足各自独立的电气特性方程,即式(1)~式(4)。为了求得双机内在电流关系,将1号电机电压方程以电流描述的形式代入2号电机电压方程中,此时,可得SIMM系统双机电流关系式为

(21)
式中:θd——1号、2号电机转子位置角度差,即θd=θ2-θ1。
众所周知,单机驱动系统中通过调节逆变器dq轴电压分量,可实现对电机dq轴激磁、转矩电流分量的调节。但是,SIMM双机系统中存在四维度状态变量,逆变环节仅可提供二维度控制变量,因此需对1号、2号双机d、q轴电流在内的4个控制分量进行优先级选取。本文以1号电机为主电机、2号电机为从电机,选取1号主电机电流idq1为高优先级分量,2号主电机电流idq2为低优先级分量。分析式(21)可知,idq1与idq2之间以θd呈正弦比例关系,通过调节1号电机电流idq1同样可以对2号电机产生调节能力。
基于此,本文设计如图4所示的SIMM系统有源阻尼方法,即在SIMM系统动态过程中,以双机转速、位置误差向1号电机激磁电流中注入阻尼分量idamp*。阻尼分量仅出现在SIMM系统动态过程中,系统进入稳态后阻尼分量趋近于零,SIMM系统可进入新的MTPA工作点。
图5所示为SIMM驱动系统双机电流调节原理,其中:图5(a)、图5(b)为主电机落后工况,且分别对应d轴电流增大、减小。由于d轴电流对电机输出转矩并无直接影响,因此对应的1号主电机d轴电压ud1并不发生改变,不对1号主电机输出转矩产生影响,但却有效地改变了2号从电机d轴电压,即可实现对2号从电机负载转矩的动态调节。图5(c)为主电机超前工况,其分析过程与图5(a)、图5(b)工况类似,此处不再赘述。
4 试验验证
4.1 试验平台及方案
为了验证所提基于有源阻尼注入的SIMM系统动态转矩响应方法的可行性和有效性,基于图6所示的双25kW PMSM调速系统试验平台进行验证与分析,包括:SIMM系统动、稳态特性及运行效率等多项测试。主电路部分:双试铭牌参数一致,关键参数为额定转速1500r/min、极数4、永磁体磁链1.2Wb、d轴电感0.6mH、q轴电感1.2mH。控制电路部分:采用多核心DSP+FPGA结构,完成SIMM驱动系统控制环节的同时,兼顾对外多端口通信及驱动保护功能,并以光纤触发的形式输出PWM波形。图7为SIMM系统动态转矩响应方法控制原理,控制系统可被划分为加权模型状态观测器、稳态MTPA磁链控制环节、主电机控制环节和从电机控制环节四部分。此外,SVPWM调节器作为脉冲调制环节。
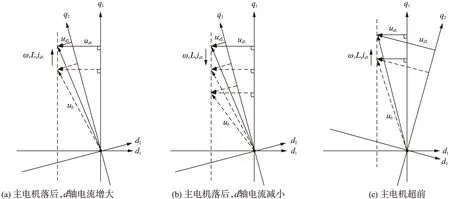
图5 SIMM驱动系统双机电压矢量关系

图6 双25kW PMSM调速系统试验平台
4.2 试验结果及分析
图8给出了SIMM驱动系统稳态电流波形。其中:1号电机为重载50N·m负荷,2号电机为轻载20N·m负荷。由图8可以看出,1号、2号电机电流幅值分别为40A和25A,频率均为50Hz,表明双PMSM在单逆变器驱动下均工作于额定转速,但其输出转矩存在差异。此时,基于加权系数Km建立的双PMSM等效加权数学模型中1号电机占主导地位,1号电机为主电机、2号电机为从电机。上述主从关系并非固定不变,随着1号、2号电机负荷强度的变化,其主、从关系及加权系数Km也随之变化,验证了双PMSM矢量控制系统加权模型的实时修正方法的优越性。
图9为双PMSM驱动系统MTPA和id=0方法损耗对比结果。其中:电机转速运转在500~1500r/min、负载转矩保持恒定为71N·m,转速变化步长为500r/min。图9数据表明,MTPA、id=0两种方法均可实现双PMSM驱动系统高效率运行,其系统全局效率值均可达到80%以上。差异性表现在,MTPA不仅考虑了PMSM的效率最优化,电机驱动系统损耗的引入使得系统全局效率值更高,而且上述差异性随着电机转速的增加逐步放大。由此可见,采取MTPA方法对于提升SIMM系统具有积极意义。
图10、图11为SIMM驱动系统动态电流波形,均将1号电机保持空载特性不变,2号电机在200ms时负载由空载突增至100%。图10为无有源阻尼注入时SIMM系统测试结果,其中:2号电机由于负载突增出现转速扰动,最大扰动范围达到200r/min,扰动持续时间达到0.5s以上;此时1号电机运行转速并未随2号电机负载波动而变化。试验结果验证了双机矢量控制系统的解耦特性,同时无附加阻尼注入使得2号电机响应时间过长(10个基波周期以上)的缺点。图11为有源阻尼注入时SIMM系统测试结果,其中:2号电机在相同负载扰动的情况下瞬时被注入辅助阻抗,对应最大扰动范围达到150r/min,但其扰动持续时间仅为0.1s以内(仅为1~2个基波周期)。1号电机在该过程中同样保持解耦特性,由此可见有源阻尼机制对于提升SIMM系统动态特性的有效性。

图7 SIMM系统动态转矩响应方法控制原理
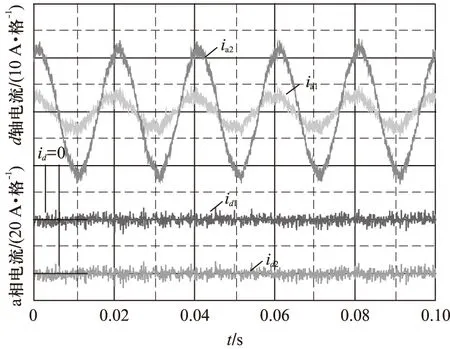
图8 SIMM驱动系统稳态电流波形
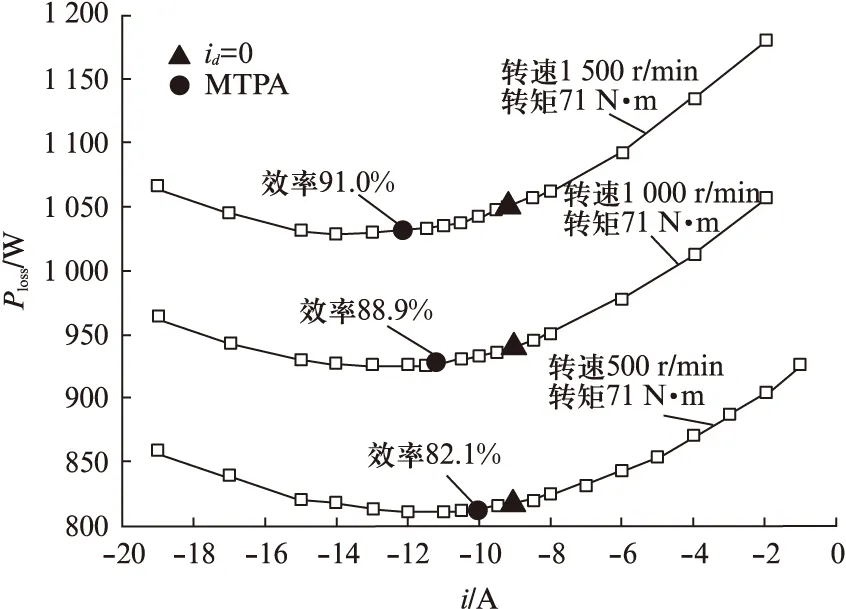
图9 双PMSM驱动系统MTPA和id=0方法损耗对比结果
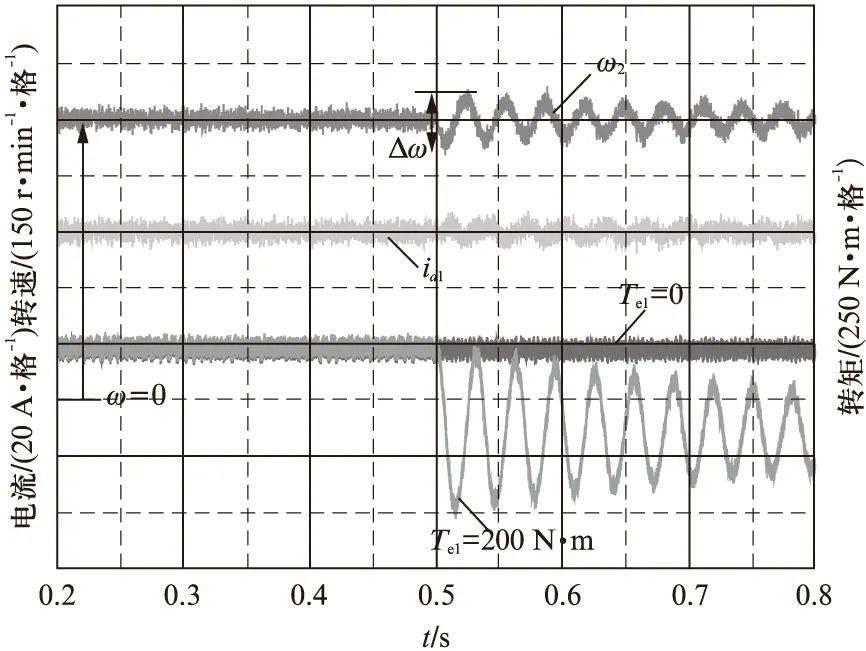
图10 SIMM驱动系统动态电流波形(无有源阻尼)

图11 SIMM驱动系统动态电流波形(有源阻尼)
5 结 语
本文针对SIMM系统动态功率失衡问题,提出了一种基于有源阻尼注入的SIMM系统动态转矩响应方法。基于双25kW PMSM调速系统试验平台进行验证与分析,得出以下几点结论:
(1) 双PMSM矢量控制系统等效模型可根据电机负载波动实时修正系统模型,保证了SIMM驱动系统优异的动、稳态过程保持解耦;
(2) 有源阻尼机制为2号从电机引入辅助控制量,对于提升SIMM驱动系统动态转矩平衡起到了积极意义,拓宽了系统暂态稳定性及适用范围。
[1] 徐力,王刚,侍乔明,等.直驱永磁风力发电机组的通用平均模型及在虚拟惯量控制中的应用[J].电机与控制应用,2015,42(6):54-58.
[2] 李建勇,王勤,戴先中,等.多电机同步系统的解耦控制[J].控制工程,2015,10(2):169-172.
[3] 张小刚.矿用电机分布式控制与保护装置的设计[J]. 煤矿机械, 2013,34(5):179-181.
[4] 王德春.多电机横向布置电牵引采煤机的设计[J].煤矿机械,2015,32(5):10-12.
[5] 张承慧,石庆升,程金.一种基于相邻耦合误差的多电机同步控制策略[J].中国电机工程学报,2007,27(15):59-63.
[6] 刘东,黄进,于文娟,等.空间矢量PWM多相变频调速系统非正弦供电技术[J].电机与控制学报,2010(9):41- 47.
[7] CHO J, BAEK J, RIM G, et al. Novel zero voltage transition PWM multi-phase converters[C] ∥Applied Power Electronics Conference and Exposition, 1996, APEC′96, Conference Proceedings 1996, Eleventh Annual, IEEE, 1996:500- 506.
[8] DUJIC D, JONES M, VUKOSAVIE S N, et al. A general PWM method for a (2n+1) leg inverter supplying n three-phase machines[J]. Industrial Electronics, IEEE Transactions on, 2009(10):4107- 4118.
[9] 万衡,吴韬,徐婧玥,等.基于直接转矩控制的单逆变器多机驱动系统[J].电机与控制应用,2011,38(10):36- 41.
[10] 李慧,刘星桥,李景,等.多电机同步协调系统控制策略[J].电机与控制应用,2014,41(3):6-11.
[11] 马秀娟,孙洋,张华强,等.基于DTC-SVM的多电机并联驱动系统[J].电机与控制应用,2014,41(6):5-10.
[12] JOSHI B M, CHANDORKAR M C. Two-motor single-inverter field-oriented induction machine drive dynamic performance[J]. Sadhana,2014,39(2):391- 407.
[13] BMJMC. Vector control of two-motor single-inverter induction machine drives[J]. Electric Power Components & Systems,2014,42(11):1158-1171.
[14] GUNABALAN R, SUBBIAH V. Performance study of two motor single inverter sensorless drive with unequal ratings[J]. International Journal of Control Theory & Applications, 2014,7(2):175-182.
[15] 张今朝,刘国海,潘天红.多电机变频调速同步系统的多模型预测控制[J].控制与决策,2009,24(10):1489-1494.
[16] 李慧,刘星桥,李景,等.多电机同步协调系统控制策略[J].电机与控制应用,2014,41(4):6-11.
[读者群]
《电机与控制应用》杂志的读者包括电机与控制领域内从事科研、设计、生产的工程技术人员,全国各大高等院校师生,企业经营、管理、营销、采购人员,各类产品代理分销渠道人员以及最终用户等,遍及电力、石油、冶金、钢铁、交通、航天、工控、医疗、机械、纺织、矿山等多个行业。
杂志读者群专业、稳定、层次高,无论是交流前沿技术、实践经验,还是传递行业信息,开展企业及产品的广告宣传都能达到事半功倍的效果。
Dynamic Torque Balance Method of Single Inverter Multiple Motor System Based on Active Damping Injection*
LIChunpin1,SONGWenfeng1,YANGWanqing1,LUANJingzhao1,XUDianGuo2
(1. National Grid Liaoning Province Power Company, Dalian 116001, China;2. School of Electrical Engineering, Harbin Institute of Technology, Haerbin 150000, China)
In order to overcome the dynamic power imbalance problem of single inverter multiple motor driven system. A dynamic power balance method of two motors based on active damping injection was proposed. First of all, equivalent weighted mathematical model of two motors were set up by introducing weighting coefficientKm. Then to complete the maximum torque per ampere double machine drive system based on this model. However, considering the dynamic state mismatch of two motors, introducing auxiliary active damping mechanism in order to improve the system dynamic stability. Finally, based on double 25kW permanent magnet synchronous motor speed control system experimental platform for validation and analysis, including:double all-digital fuzzy drive system dynamic and steady state and efficiency index. The results showed that the proposed active damping mechanism for improving the power of dual machine system of dynamic balance of theoretical significance and practical value.
single inverter multiple motor(SIMM); dynamic torque; active damping; weighted model
国家自然科学基金项目(51377020):大规模风电接入弱交流电网的机网交互作用机理与控制研究
李春平(1971—),男,高级工程师,研究方向为电力系统规划与管理、电力电子新技术在智能电网中的应用。 徐殿国(1960—),男,教授,博士生导师,研究方向为电力电子新技术在智能电网中的应用。
TM 301.2
A
1673-6540(2016)11- 0067- 07
2016-06-07
