基于模型预测算法功率补偿双PWM协调控制*
2016-12-28范波,王珂,曾佳,张帆,徐翔
范 波,王 珂,曾 佳,张 帆,徐 翔
(1. 河南科技大学 信息工程学院, 河南 洛阳 471023;2. 中信重工机械股份有限公司, 河南 洛阳 471039)
基于模型预测算法功率补偿双PWM协调控制*
范 波1,2,王 珂1,曾 佳1,张 帆1,徐 翔1
(1. 河南科技大学 信息工程学院, 河南 洛阳 471023;2. 中信重工机械股份有限公司, 河南 洛阳 471039)
从能量流动角度分析双PWM结构,在前端整流侧采用模型预测算法实现对整流器输出的有功功率与无功功率最小跟踪误差的基础上,采用动态与静态相结合的功率补偿方法实现对系统能量控制,从而代替前端整流侧电压外环PI控制,用以达到在负载功率突变时抑制直流母线电压波动,减少直流侧电容容量,控制网侧谐波的目的。后端采用转子磁链定向控制方法实现对三相异步电动机的控制,最终实现双PWM前端整流侧与后端逆变侧的协调控制。仿真结果表明,系统在电动机功率突变时,能够实现功率最小误差跟踪控制,并且能够抑制直流母线电压波动,网侧电流波形良好。
模型预测; 跟踪误差; 功率补偿; 协调控制
0 引 言
双PWM变换结构由于能够实现单位功率因数,能量双向流动,且网侧谐波小,在新能源领域以及交流调速领域受到广泛关注。
随着对双PWM变换结构的不断研究,专家学者也不断提出各种控制策略,可分为如下几大类:独立控制策略,主从控制策略,电容电流控制策略等。独立控制就是将整流部分与逆变部分当成两个独立部分,两部分之间仅通过直流侧电容联系起来,独立控制方法较为简单,在负载突变时,直流母线电压波动较大,只能通过增加电容容量抑制直流母线电压波动。主从控制策略是将逆变部分作为主要控制系统,将逆变部分的信息前馈至整流侧,从而实现对整流侧输出功率的控制,达到整流器输出功率与逆变器输出功率匹配的目的。文献[2-5]负载功率前馈就是一种典型的主从控制方法,将负载功率前馈至整流侧,调节整流器输出的有功功率。主从控制是从系统各部分功率之间关系入手实现对系统的控制。电容电流控制是将负载电流前馈至整流侧,通过控制整流器有功电流与无功电流的输出实现对系统电流的控制,从而实现整流侧输出有功电流全部用于逆变侧。文献电容电流直接控制就是将负载电流前馈至整流侧,控制电容电流为零,从而实现减少电容容量、抑制直流母线电压波动的目的。
整流器在内环控制传统方法中有PI控制和滞环比较控制。内环采用PI控制会影响系统的响应速度,同时增加系统的设计难度。采用滞环比较的方法,会造成开关频率不固定,且开关表直接影响系统性能,故本文采用模型预测的方法。模型预测控制(Model Predictive Control, MPC)具有结构简单、响应速度快等优点,在处理非线性系统问题时有很大优势。
在传统的PWM整流器双闭环控制结构中,无论是通过基于瞬时功率理论的直接功率控制(Direct Power Control, DPC),还是采用电流内环直接电流控制(Direct Current Control, DCC),其本质都是相同的,都是采用PWM整流器平衡状态下的数学关系对系统有功功率、无功功率或有功电流、无功电流控制,而电压外环均采用PI调节获得有功电流或有功功率的指令值[9-13]。但实际上,对系统能量的补充是一个动态过程,并非线性的静态过程,所以采用系统静态平衡状态下的数学关系设计控制器与系统实际情况是有一定误差的。本文针对这一问题提出一种静态功率补偿与动态功率补偿相结合的方法,将电机功率直接作用于电压控制环节,并采用补偿的方法得到有功功率指令值,从而替代了传统的电压外环PI调节器,实现对整流侧与逆变侧的协调控制。
1 三相电压型PWM整流器功率数学模型分析
1.1 α-β坐标系下瞬时功率理论
设网侧电动势为es,则在两相αβ静止坐标系下,可得eα=escosωt、eβ=essinωt。
根据瞬时功率理论,可知在αβ静止坐标系下瞬时功率表达式为
P=eαiα+eβiβ
(1)
Q=eβiα+eαiβ
(2)
1.2 α-β坐标系三相电压型PWM整流器功率数学模型
三相电压型主电路拓扑结构如图1所示。
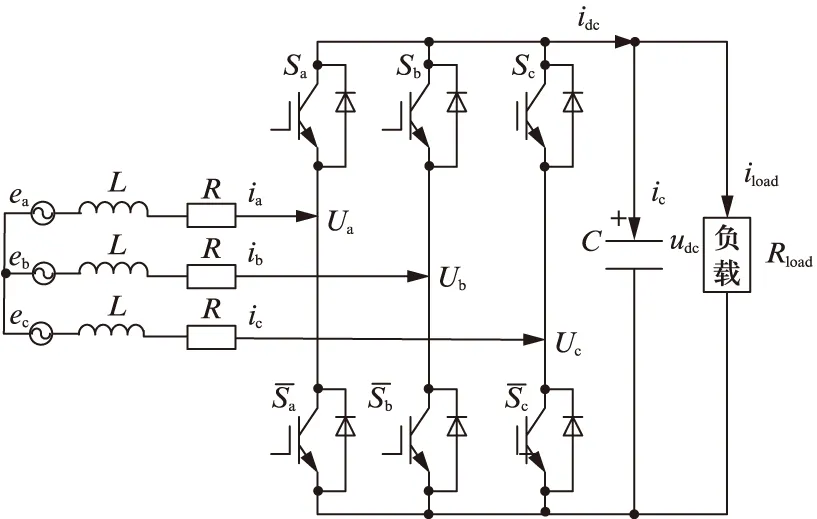
图1 三相电压型PWM整流器主电路
根据三相电压型PWM整流器主电路,由式(1)、式(2)结合文献[14]可得PWM整流器αβ坐标系下功率数学模型:
(3)
(4)
式中:P、Q——PWM整流器输出的有功功率与无功功率;
ω——电源旋转角频率;
eα、eβ——电源电动势αβ轴上的分量;
uα、uβ——PWM整流器输入电压量。
1.3 m-t坐标轴下三相异步电动机数学模型
对于逆变侧电机控制,本文采用转子磁链定向空间矢量控制的方法,所以只给出mt坐标轴下三相异步电动机数学模型。由文献[15]可得m-t旋转坐标系下三相异步电动机数学模型。m-t轴由d轴与转子磁链矢量重合得来,这是d-q旋转坐标系下的一种特殊情况,转子磁链与定子磁链空间角频率是相同的,为同步角频率ω1。
mt坐标系下电压方程:
(5)
m-t坐标系下磁链方程为
(6)
m-t坐标系下转矩方程为
Te=pLm(istirm-ismirt)
(7)
m-t坐标系下运动方程:
(8)
式中:usm、ust、urt、urt——m-t旋转坐标系下定子电压分量与转子电压分量;
ism、ist、irm、irt——定子电流分量与转子电流分量;
ψsm、ψst、ψrm、ψrt——定子磁链分量与转子磁链分量;
ω1——同步角频率;
ω——转子角频率;
Rs、Rr——定子绕组电阻和转子绕组电阻;

Lsm——定子间互感;

Lls——定子漏感;
Llr——转子漏感;
Te——电磁转矩;
TL——负载转矩;
p——电动机极对数;
J——转动惯量。
2 PWM整流器功率最小跟踪误差及功率补偿原理分析
2.1 系统功率最小跟踪误差
与基于瞬时功率理论功率内环采用PI调节的DPC不同,模型预测DPC是根据这一时刻系统输出的有功功率与无功功率预测下一时刻系统输出的有功功率与无功功率,将预测的有功功率与无功功率作为下一时刻系统的输入量,由此实现对系统的提前控制。故整流器输出的有功功率与无功功率的预测值的精确度直接关系到系统的品质。
在任意采样时刻t=k时,将一阶导数离散化可得
(9)
(10)
式中:Ts——系统的采样周期。
为了保证系统每个采样周期输出的有功功率、无功功率与模型预测的有功功率、无功功率误差值最小,实现功率误差最小,故建立价值函数:
E=[Pref-P(k)]2+[Qref-Q(k)]2
(11)
式中:Pref、Qref——有功功率与无功功率的指令值;
P(k)、Q(k)——在t=k时刻,有功功率和无功功率的期望值。
期望t=k时刻的指令值与t=k+1时刻的实际输出值是相同的,达到提前预测的目的,故改写式(11)得
E=[Pref-P(k+1)]2+[Qref-Q(k+1)]2
(12)
将式(9)、式(10)代入式(12)可得


(13)
实际控制系统有功功率和无功功率的输出与uα、uβ有直接关系。故保证模型预测的uα、uβ与实际输出的uα、uβ误差最小是十分必要的。
式(13)分别对uα、uβ求一阶偏导数可得
(14)
(15)
求式(14)、式(15)驻点可得

(16)

(17)
对式(16)、式(17)分别求二阶偏导数可得
(18)
(19)
(20)
因为A>0,且B2-AC<0,故该式极点极为驻点且极值点为极小值点,可确定满足在功率跟踪误差最小条件下的uα、uβ数学表达式为式(16)、式(17)。
2.2 功率补偿原理分析
根据系统能量瞬时平衡原理,能量从电网流出至滤波电感、整流器、直流侧电容、逆变器,最终流入三相异步电动机。在忽略功率器件开关损耗情况下,在一段时间T内,系统各部分之间能量关系为
E=ER+EL+Ec+Eload
(21)
式中:E——电网输出能量;
ER——网侧电阻耗能及能量流动过程中损耗;
EL——滤波电感储能;
EC——直流侧电容储能;
Eload——电机消耗能量。
在时间段T内,系统在dq坐标系下各部分能量数学表达式为
(22)
式中:ed——电网电动势d轴分量,常量;
id——电网电流d轴分量,电网流入系统的有功电流;
t——系统任意时刻;
Lg——网侧电感;
Cdc——直流侧电容;
R——网侧电阻;
UMd、UMq——逆变器输出电压d轴与q轴分量;
iMd、iMd——逆变器输出电流d轴与q轴分量。
系统负载功率突变,造成电网侧流入能量与逆变器输出能量不符导致直流母线电压波动。常规电压外环经PI调节得负载功率变化量,从而影响功率内环。即使采用负载功率前馈的方法提前将负载功率变化量作用于功率内环,但电压外环采用PI控制,仍旧很难反映系统在负载突变至系统再次回到能量平衡这一过程的能量动态变化。
为了描述这一过程,可将功率补偿分为两个部分:第一部分为负载功率变化引起能量变化,这部分能量需要实时补偿;第二部分为负载功率突变至系统能量再次平衡这段时间负载吸收储能元件的能量。由于储能元件:网侧滤波电感、直流侧电容充能是一个动态过程,故需要动态补偿。
第一部分功率补偿关系式为
(23)
忽略网侧电阻及能量流动过程中的损耗可得
(24)
第二部分功率补偿关系式为
E2=EL+EC
(25)

(26)
期望系统通过n个周期补偿储能元件消耗的能量,则:
(27)
式中:Ts——系统采样周期。
根据式(22)可知,如果在负载功率突变时刻一次性补偿消耗的能量,由于Udc(t+T)=Udc*为常量,而时间T=nTs同样也为常量。电容能量ΔEC瞬间增大或减小,就会造成直流母线电压Udc波动较大,故需要动态补偿储能元件消耗的能量。采用动态功率补偿储能元件功率,如果n值选取过大则会增加系统的调节时间,如果n值选取过小则会造成直流母线电压波动变大,严重时会造成系统不稳定。故选取调节周期个数十分重要。
根据式(24)、式(27)可得
(28)
又因为:
(29)
对式(29)一阶导数离散化可得
(30)
又因为期望n个周期补偿储能元件消耗的能量,且只考虑系统负载功率突变时刻至系统再次恢复至稳定时刻储能元件的能量变化。故根据前文所述,可改写式(28)得
(31)
根据式(31)可得直流母线电压波动量与网侧电流d轴分量的关系:
(32)

(33)
当负载功率突然降低时,n值仍旧满足上述关系,故可根据实际需要确定直流母线电压波动范围,从而确定n的取值,并且id可通过iα、iβ经Clark变换得到。
3 仿真分析
根据上述研究的基础,在Simulink仿真平台上搭建双PWM仿真模型。仿真参数如下:整流器相电压有效值220V,网侧电感15mH,直流侧电容 1000μF,直流母线电压指令值600V,采样频率 5kHz。逆变器线电压380V,频率50Hz。三相异步电动机容量5000VA,采样频率5kHz,转子电感0.002H,转子电阻0.816Ω,定子电感0.002H,定子电阻0.435Ω,电动机转速指令值1000rad/s,磁链指令值1.2。转速环PI控制器P参数为750。转矩环PI控制器P参数为10,I参数为100。电流环PI控制器P参数为100,I参数为150。磁链环PI控制器P参数为2500,I参数为500。
双PWM控制结构可分为两大部分,第一部分为整流器与直流侧电容,第二部分为逆变器与电动机。为保证仿真结果的合理性与准确性,本文首先分析整流器的控制效果,然后对三相异步电机控制效果进行仿真试验。
对比分析PWM整流器采用模型预测算法,电压外环采用PI控制器与采用功率补偿算法控制效果。负载为200Ω电阻,当0.3s时,负载突变为100Ω,如图2所示。
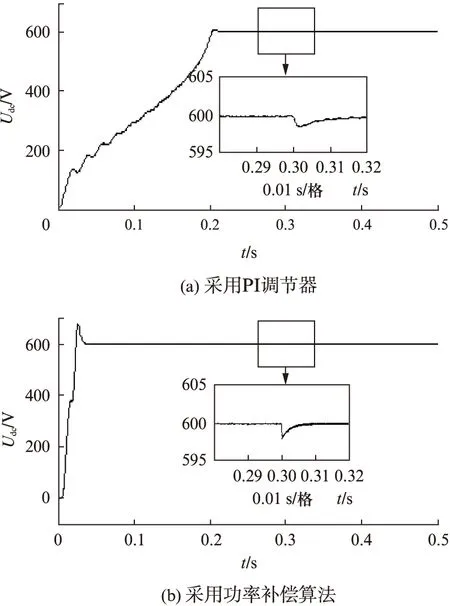
图2 直流母线电压负载功率突变
图2(a)为PWM整流器电压外环采用PI控制器,0.3s时负载功率突变,直流母线电压压降约为1V,调节时间约为0.01s。但当系统恢复稳定状态时,由于负载改变,系统直流母线电压存在一定静差难以消除。图2(b)为电压外环采用功率补偿算法,0.3s时负载功率突变,直流母线电压压降同样约为0.1V,且调节时间为0.01s。但系统稳定时不存在静差,直流母线电压能够调节至指令值。当采用功率补偿的方法时,系统的响应速度明显高于采用PI控制。如图2(a)系统0.2s时才达到稳态,而图2(b)系统在约0.03s即达到稳态。
以a相为例,当采用功率补偿算法时,能够实现网侧电压电流同相位,并且波形良好。当负载功率突变时,网侧电流畸变较小,能够平滑过渡,如图3所示。
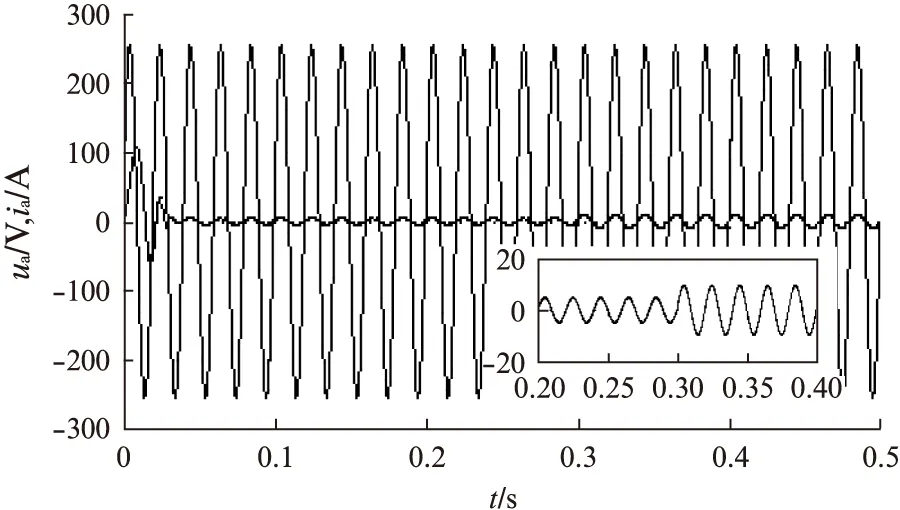
图3 网侧电流电压波动
经上述对比分析,采用功率补偿算法能够对整流器实现良好的控制效果。故本文对双PWM控制结构进行仿真分析,为体现试验结果的有效性,针对本文采用的电机容量,在0.3s时电机转矩突变为30N·m,使电机处于高功率输出状态,对比分析整流侧采用PI调节器与采用功率补偿算法在电机功率较大范围突变时的控制效果,如图4所示。采用PI调节器的系统直流母线电容为5000μF,采用功率补偿算法的系统直流母线电容为1000μF。
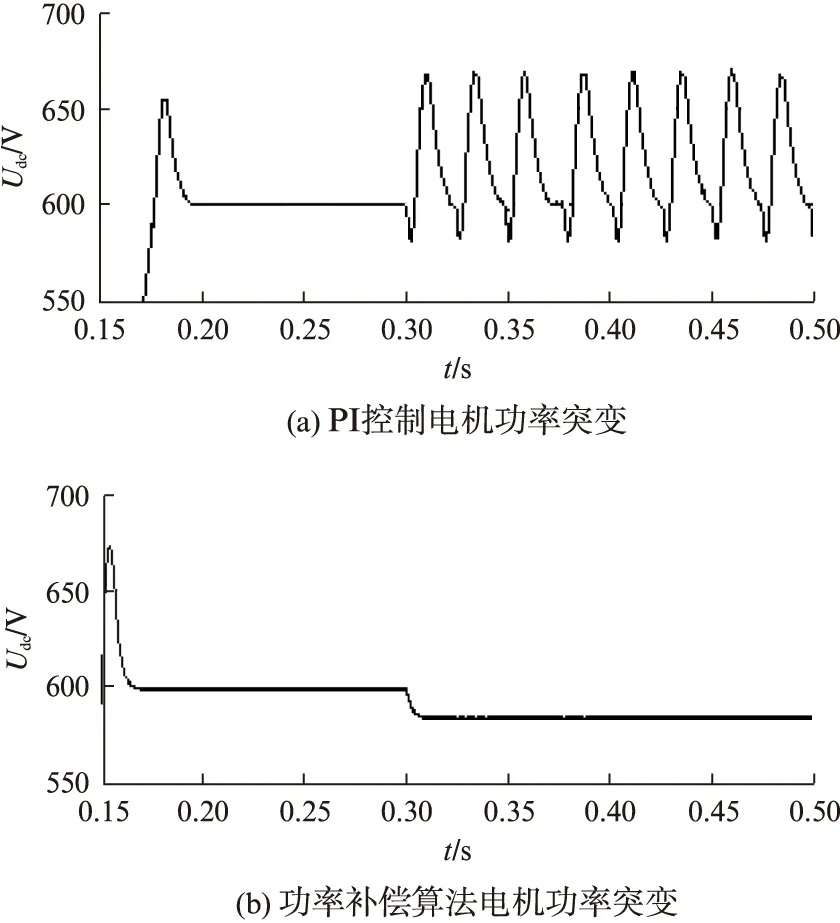
图4 电机功率突变
0.3s电机转矩突变为30N·m,采用PI控制器的双PWM控制系统直流母线电压,在电机功率突变时刻直流母线电压大范围波动,正负波动值约为80V。系统很难达到稳态,可以说在电机转矩突变时刻,系统直流母线电压已经是大范围、长时间波动。采用功率补偿算法的双PWM控制系统,直流母线电压存在约15V的压降,但是直流母线电压并未出现大范围波动,且直流侧电容采用1000μF远小于采用PI调节系统的5000μF。采用功率算法同样能够保证电机的正常运行,电机转速如图5所示。
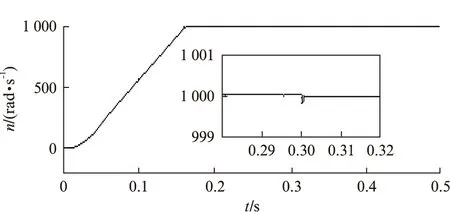
图5 电机转速
电机转速指令值为1000rad/s,在电机转矩突变时,转速降约为0.1转,可以忽略不计。电机转矩电流与励磁电流如图6所示。
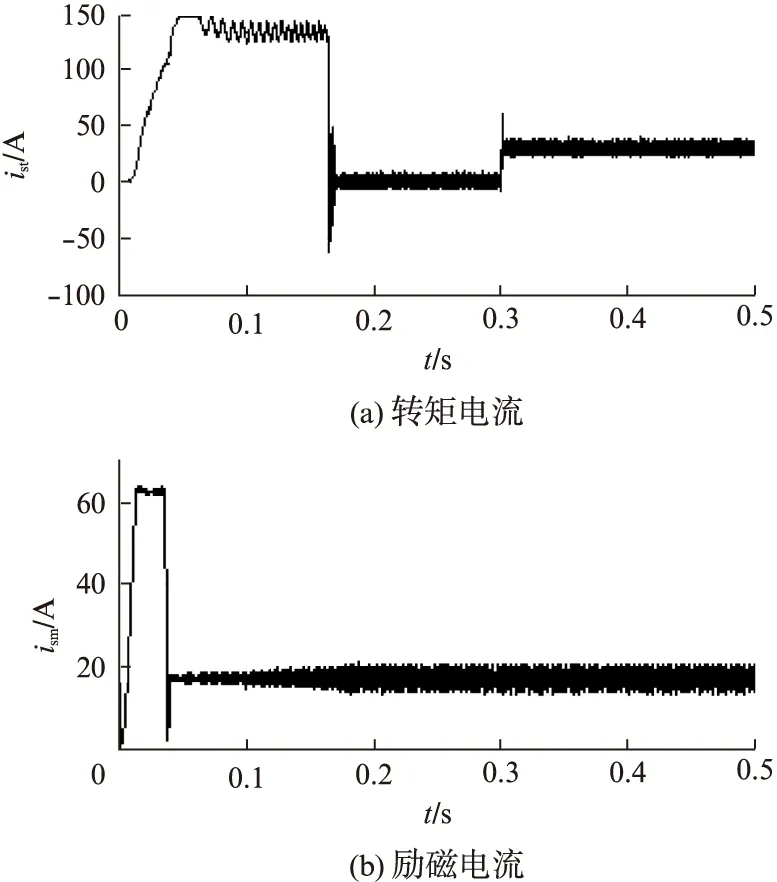
图6 转矩电流与励磁电流
图6(a)为电机转矩电流,0.3s电机转矩突变,转矩电流随之增大且与转矩成正比关系,励磁电流保持恒定不变。三相异步电动机等效成为直流电机控制,三相异步电动机磁链圆如图7所示。
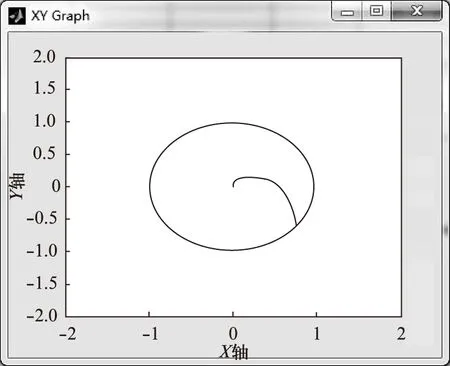
图7 磁链圆
4 结 语
本文详细分析了功率补偿原理,通过功率补偿代替整流器传统的电压外环PI调节器,并采用模型预测算法实现系统最小功率跟踪误差,实现PWM整流器输出功率的有功功率和无功功率与给定功率最小误差。对比分析了采用功率补偿算法与采用PI调节的双PWM控制系统在三相异步电动机功率突变时直流母线电压波动情况、网侧电流电压变化及电机转速变化。仿真结果表明,采用功率补偿算法能够替代传统的PI调节器,保证电动机的正常运行,在电动机功率突变时能够有效地抑制直流母线电压波动,保证系统稳定,同时能够减少直流侧电容容量实现双PWM结构的协调控制。
[1] 李昆鹏,万健如,宫成,等.双PWM变换器一体化控制策略.电机与控制学报,2013,17(4):72-78.
[2] 戴鹏,朱方田,朱荣伍,等.电容电流直接控制的双PWM 协调控制策略.电工技术学报,2011,26(1):176-141.
[3] 刘秀翀,张化光,褚恩辉,等.三相电压型PWM整流器功率控制方法.电机与控制学报,2009,13(1):48- 49.
[4] 曾宪金,李小为,胡立坤,等.基于自然坐标与功率前馈的三相电压型PWM变流器控制.电力系统保护与控制,2015,43(11):13-19.
[5] 王秋梅,尹赟,宋文祥.双PWM变换器功率前馈控制方法.电气传动自动化,2013,4(35):15-18.
[6] 郑征,徐奔.双PWM变频器电容电流反馈控制的研究.电气传动自动化,2011,33(6):1-5.
[7] 张兴,张崇巍.PWM整流器极其控制.北京:机械工业出版社,2012.
[8] 罗德荣,姬小豪,黄晟,等.电压型PWM整流器模型预测直接功率控制.电网技术,2014,38(11):3111-3114.
[9] 苏晓东,焦姣.基于瞬时功率理论的电压型PWM整流器研究.电力电子技术,2010,44(10):54-56.
[10] BOUAFIA A, GAUBERT J P, KRIM F. Predictive direct power control of three-phase pulse width modulation(PWM) rectifier using space-vector modulation(SVM).IEEE Transactionson Power Electronics,2010,25(1):228-236.
[11] HASSAN K, OSMAN K. Lyapunov based control for three-phase PWM AC/DC voltage source converters. IEEE Trans on Power Electronics, 1998, 13(5):801- 813.
[12] 黄静,杨柏旺,吴志清,等.基于负载功率前馈的PWM整流器控制策略.电力电子技术,2014,48(11):61.
[13] 丁奇,严东超,曹启蒙.三相电压型PWM整流器控制系统设计方法的研究.电力系统保护与控制,2009,37(23):84- 88.
[14] 万健如,宫成,李昆鹏.电压型PWM整流器预测直接电容功率控制研究.电力系统保护与控制,2013,41(3):96-101.
[15] 阮毅,陈伯时.电力拖动自动控制系统.北京:机械工业出版社,2010.
Double PWM Coordinated Control Based on Model Predictive Control Algorithm and Power Compensation*
FANBo1,2,WANGKe1,ZENGJia1,ZHANGFan1,XUXiang1
(1. College of Electrical Engineering, Henan University of Science and Technology, Luoyang 471023, China;2. Citic Heavy Industries Co., Ltd., Luoyang 471039, China)
Analysing double PWM structure from energy flow, based on controlling active power and reactive power of rectifier by using model predictive control. Using the method of combine dynamic with static to compensate system power in order to control system power, thus power compensation could replace PI control of voltage loop. So restraining fluctuation on DC bus when load power sudden change, reducing DC side capacitor’s capacity and control line side harmonic. Controling induction motor by using rotor flux orientation. At the end, realizing rectifier side and inverter side coordinate control. Accroding to results of simulation, system could achive the smallest error following and could restrain fluctuation on DC bus when load power sudden change. The line side current waveform displayed well.
model prediction; tracking error; power compensation; coordination control
国家自然科学基金项目(U1404512)
范 波(1975—),男,副教授,研究生导师,研究方向为大容量功率变换与高压交流调速。 王 珂(1991—),男,硕士研究生,研究方向为电力电子与电气传动。
TM 301.2
A
1673-6540(2016)11- 0039- 08
2016-05-09
