基于多级网格模型的LiDAR数据河流边缘提取算法
2016-12-27闻兆海
闻兆海,谢 忠
(1.中国地质大学(武汉) 机械与电子信息学院,湖北 武汉 430074;2.中国地质大学(武汉) 信息工程学院,湖北 武汉 430074)
基于多级网格模型的LiDAR数据河流边缘提取算法
闻兆海1,谢 忠2
(1.中国地质大学(武汉) 机械与电子信息学院,湖北 武汉 430074;2.中国地质大学(武汉) 信息工程学院,湖北 武汉 430074)

分析了内陆河流域点云数据的特性,提出了一种基于多级网格模型的河流边缘提取算法。首先将目标区域按网格窗口大小进行逐级分层,并建立层级继承关系;然后计算网格的平均高程、平均反射强度、点云密度等参数,利用8邻域判决算法、面积阈值算法和河流连通性原则确定水体网格;最后对河流边缘网格的水体点数据进行提取,确定河流边缘。实验数据表明,该方法能够准确对河流进行提取。
机载激光雷达;点云数据;河流边缘提取;多级网格模型
河流是人们赖以生存的重要自然资源,在人类生活、工农业生产、气候、历史变迁等方面,产生着重要的影响。对河流的观测和研究一直是环境、水利、资源等领域的研究重点。目前,内河流域数据采集的主要方式已由传统的航空摄影测量发展到数字摄影测量(DPS)[1]。机载LiDAR是近年来快速发展的一种低空对地测量方法,通过对地发射激光脉冲,并实时接收地面及地表物体反射的激光脉冲,可快速获取地面及地表物体的位置及高程信息,生成目标区域的三维点云数据。这种测量方法受天气、地形等条件影响小,可方便、快捷地获取目标区域的地形、地物信息,因而,在内陆水域、海岸、滩涂测量领域得到了广泛的应用[2-4]。机载LiDAR获取的点云数据包括离散点的三维坐标和反射强度数据,也可记录数据采集的信息、点的分类信息和GPS时间及颜色信息等[5]。
乔纪纲[6]等利用斜率分割、密度和反射强度分割、高度分割从LiDAR点云数据中提取了滨岸湿地微地貌。王宗跃[7-8]等基于平滑的双层格网,结合影像和LiDAR点云数据对水体边缘轮廓线进行了精确提取。张永军[9]等采用LiDAR 数据生成灰度高程图像,利用扫描线法确定最优水体种子点,再结合航空影像完成水体边缘的准确提取。王延霞[10]等从LiDAR数据生成的DEM中自动提取了平原地区的河网结构,也取得较好的实验结果。本文结合内陆河流域点云数据的特性,提出了一种基于多级网格模型的河流边缘提取算法。
1 机载LiDAR点云水体数据分析
机载LiDAR点云数据记录了地表地物的位置、高程和反射强度等基本信息,也包括回波类型、点分类、扫描角度和GPS时间等扩展信息[5]。不同地物的高程、反射强度、回波类型存在差异,这些信息为地物分类提供了基本依据。
概括起来,水体的特征表现为:①高程差异小,在平缓区域,高程趋同;②对机载LiDAR工作波段的电磁波具有强吸收性,表现为无反射点记录或记录点稀疏,反射强度弱;③水体形状不规则,面积差异大,河流水体具有自然连通的性质。上述特征为水体提取提供了基本参考依据。
2 多级网格模型
不同的水体在形状和面积上差异较大,即使是同一条河流,在不同区段,宽度也不尽相同,因此,无法用单一静止的几何模型来描述不同的水体。为此,本文构建了一种动态的多级网格模型,用不同大小的分级网格来逼近表征不同面积大小的水体。
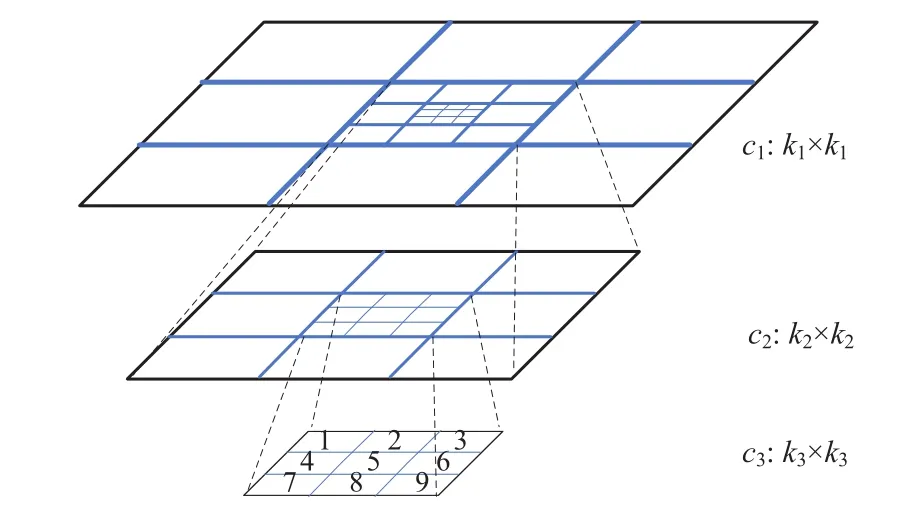
图1 多级网格模型
根据目标区域的大小不同,构建一个n级网格模型,自上而下对应的网格层为c1、c2、…、cn。在c1层,按照边长k1进行网格划分,网格编号为bij,左下角为起始网格b11;对c1层的网格bij进行九宫格划分,可得c2层的网格bijp1,网格边长k2=k1/3;同理,可得cn层的网格bijp1…pn-1,网格边长kn=kn-1/3,网格间的映射关系如图1所示。
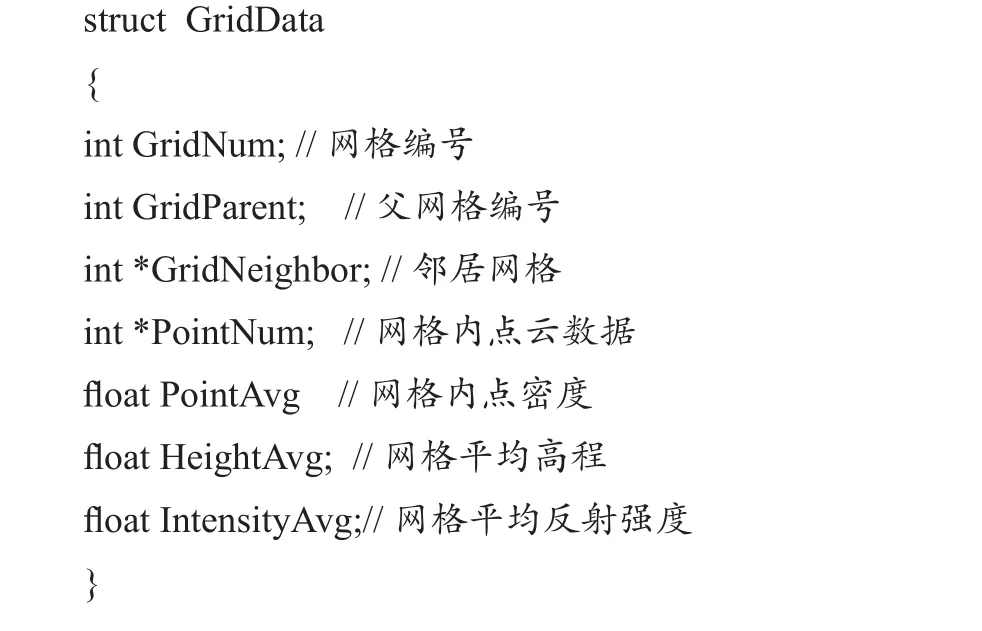
根据各级网格的划分方法,确定网格边界,可得到各级网格区域内的点云数据,计算各网格的平均高程、平均反射强度以及点云密度,可得到各网格的数据结构如下:
3 水体边缘提取流程
3.1 算法流程
选择目标区域的点云数据,按照点云数据处理的一般流程,其基本步骤如下:
1)粗差剔除,筛选出高程异常点,予以滤除;
2)将目标区域按网格窗口尺度大小进行逐级分层,并建立层级继承关系,根据网格边界坐标,将数据点划分至相应网格内;
3)计算网格内点数据密度、平均高程、平均反射强度等数据,根据设定阈值,自上而下,逐级确定水体网格;
4)计算水体网格的邻域非水体网格,提取网格内邻近水体点,确定河流水体边缘。
3.2 种子水体网格的提取
水体网格的提取是整个数据处理的关键。由于水体对机载LiDAR工作波段的电磁波具有强吸收性,因此得不到反射点记录或点记录稀疏,这种情况还可能与建筑物、植物等地物的遮挡有关,在创建网格模型时,水体区域数据和阴影区域数据会形成特征近似网格。
如何确定哪些网格是水体网格GridWater,是算法处理的重点。具体思路如下:
首先,在c1层,根据网格的点数据密度、平均高程、平均反射强度提取疑似水体网格Gi,Gi满足:P (Gi)≤P,H(Gi)≤H,F(Gi)≤F,其中,P、H、F分别为网格的点数据密度、平均高程和平均反射强度阈值。
然后,确定种子水体网格。①8邻域网格判别法。比较Gi的8邻域网格,如果其8邻域网格N8(Gi)均为疑似水体网格,则将当前Gi设定为种子水体网格,如图2a所示。②面积阈值法。如果Gi的8邻域网格N8(Gi)不全为疑似水体网格,则通过多级网格映射模型,提取所有与Gi连通的疑似水体网格,计算连通区域面积Si,如果大于阈值S,则Gi设定为种子水体网格,如图2b所示。
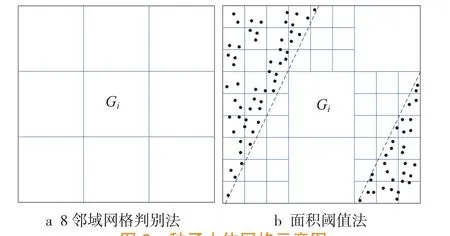
图2 种子水体网格示意图
最后,根据水体自然连通的性质,运用区域增长机制,以种子水体网格为中心,将与其邻接的各层疑似水体网格标记为水体网格。
4 实验结果及分析
实验的目标区域位于德国的Vaihingen地区,数据记录共有72 925条,数据采集于2008年,如图3a所示,该区域的卫星图像如图3b所示。目标区域有一条河流,一个小岛和一座桥,水体无反射点记录。
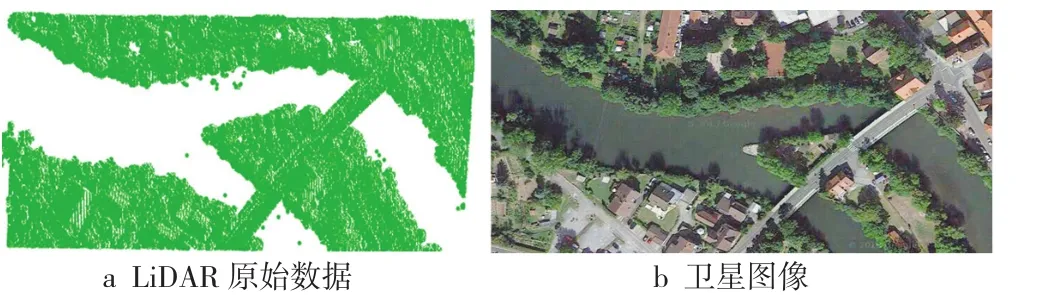
图3 研究区示意图
依次对目标区域点数据记录进行处理。本实验中,将目标区域分为3层,依次为c1、c2和c3,设c1层网格边长为9 m,可得c1层网格数为324个,c2、c3层网格边长依次为3 m、1 m。设c1层的网格点数据密度阈值P为0.05 个/m2,平均高程阈值H为258 m,平均反射强度阈值F为5,经过阈值比较,c1层疑似水体网格数为65 个。 根据种子水体网格确定算法,运用网格区域增长机制,得到c1层的水体网格共有49个,其中8邻域网格判别法得到43个,位于图4a的区域①;面积阈值法得到6个,面积阈值S设定为100 m2,位于图4a的区域②、③。水体边缘如图4a中点集部分所示。将c1层网格边长设定为4.5 m,重新执行上述程序,可得水体边缘如图4b所示。
网格模型为3层,当c1层网格边长设定为9 m时,水体面积为8 786 m2,水体边缘点数目为4 110个;当c1层网格边长设定为4.5 m时,水体面积为8 777 m2,水体边缘点数目为3 179 个。从实验结果看,两次实验都获取了准确的河流边缘数据点,得到的水体面积基本一致。
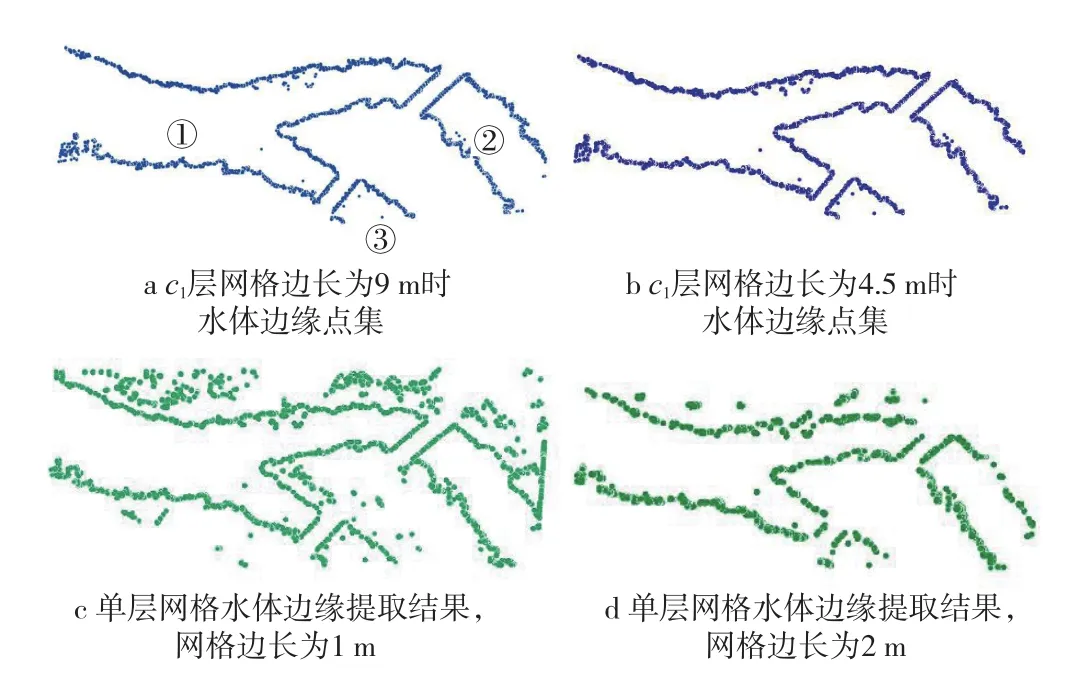
图4 实验提取结果
5 结 语
本文提出的基于多级网格模型的河流边缘提取算法,可对不同面积大小的水体进行边缘提取,相较于单级网格模型提取结果,如图4c、d所示,精度更高,也有效避免了其他类别数据空洞的影响。另外,本算法也提取了河流上的桥梁以及河流中岛屿的边缘特征,为流域特征地物建模提供了参考。对于因桥梁遮挡而损失的水体边缘特征提取及相关水体计算,需要进一步研究。
[1] 赖旭东,郑学东,万幼川.激光雷达技术在数字流域中的应用探讨[J].长江科学院院报,2005(5):88-91
[2] 郭际元,韩程帅,陈奇.LiDAR技术在内陆水系监测管理中应用综述[J].环境科学与技术,2012(12):193-197
[3] 楼燕敏,吴迪.机载LiDAR技术在浙江省滩涂海岸测量中的应用研究[J].测绘通报,2012(12):47-50
[4] 谢有忠,詹瑜璋,胡植庆,等.激光雷达地形资料用于河道输沙的研究[J].遥感学报,2013(1):202-209
[5] 张靖,高伟. LAS格式解析及其扩展域的应用[J].测绘科学, 2008,33(3):154-155
[6] 乔纪纲,黎夏,刘小平.基于地面约束的滨岸湿地微地貌LiDAR检测研究[J].中山大学学报(自然科学版), 2009(4): 118-124
[7] 王宗跃,马洪超,徐宏根,等.结合影像和LiDAR点云数据的水体轮廓线提取方法[J].计算机工程与应用, 2009(21):33-36
[8] 王宗跃,马洪超,徐宏根,等.基于LiDAR点云数据的水体轮廓线提取方法研究[J].武汉大学学报(信息科学版), 2010(4):432-435
[9] 张永军,吴磊,林立文,等.基于LiDAR数据和航空影像的水体自动提取[J].武汉大学学报(信息科学版), 2010(8):936-940
[10] 王延霞,史照良,李鹏.LiDAR DEM在平原区河网自动提取中的应用研究[J].测绘通报,2013(9):51-54
P23
B
1672-4623(2016)07-0017-03
10.3969/j.issn.1672-4623.2016.07.005
闻兆海,博士研究生,讲师,从事机载激光雷达数据处理研究工作。
2015-06-12。
项目来源:中央高校基本科研业务费专项资金优秀青年基金资助项目(CUGL130225)。
