航磁补偿技术及补偿质量的评价方法
2016-12-27刘首善唐林牧许庆丰
刘首善,唐林牧,许庆丰,吴 芳
(1.91046部队,山东莱阳265200;2.上海通用卫星导航有限公司,上海200040;3.海军航空工程学院电子信息工程系,山东烟台264001)
航磁补偿技术及补偿质量的评价方法
刘首善1,唐林牧2,许庆丰2,吴 芳3
(1.91046部队,山东莱阳265200;2.上海通用卫星导航有限公司,上海200040;3.海军航空工程学院电子信息工程系,山东烟台264001)
航磁补偿的目的是要消除飞机平台引入的干扰磁场,对于高精度航空磁探来说,磁补偿质量直接制约了探测效果。文章按照航磁补偿的执行步骤进行了飞机平台磁干扰建模、模型参数求解方法、补偿飞行方案。另外,为了对补偿飞行的质量进行有效控制,采用量化指标对磁补偿效果进行评价,判定补偿效果的优劣。最后,基于MFC软件平台开发了航磁补偿系数求解及补偿质量评价软件。
航空磁探;磁补偿;改善率;评价指标
航空磁探测在矿藏探测、沉船定位及反潜等领域有着广泛的应用。在航空磁测过程中,飞机在地磁场中运动会产生干扰磁场,干扰磁场叠加在目标弱磁信号上,影响甚至掩盖目标信号[1]。为有效探测目标,需要对飞机平台产生的干扰磁场进行补偿,消除平台干扰磁场的影响。航空磁探测精度既取决于飞机机载磁探设备的性能,又受到飞机自身背景干扰磁场的制约,如何有效消除、补偿飞机背景干扰磁场,这是实现高精度航空磁探的关键技术。航磁补偿方法可分为硬补偿和软补偿2种[2],硬补偿采用电子设备产生的人工磁场去抵消飞机平台的干扰磁场,但由于补偿效果差,速度慢,已基本被淘汰;软补偿(特指航磁补偿)是通过建立飞机平台磁干扰模型以及设计模型参数的优化求解算法,利用校准飞行中采集的数据计算模型中的磁干扰补偿系数,并对探测阶段采集的数据进行实时补偿。因此,飞机平台磁干扰建模及模型参数的求解精度,决定了飞机平台磁干扰补偿的效果。
在补偿完成后,如何评价磁补偿的效果是一个重要问题,它关系到是否需要重新进行磁补偿飞行、模型补偿系数重估计以及后续探测目标的能力[3-5]。目前,国际上各研究机构对航磁补偿质量并没有统一的评价标准,本文引入了一些量化指标对补偿效果进行评价,并分析了各评价指标的优缺点。
1 飞机平台磁干扰建模
飞机平台背景磁干扰模型化补偿流程见图1。其中,飞机平台磁干扰补偿建模与模型参数求解是至关重要的环节,直接决定了磁干扰补偿的精度和效果。

图1 飞机平台磁干扰模型化补偿方法技术路线Fig.1 Route map of aircraft magnetic compensation technique
以飞机上磁探仪位置作为坐标原点建立坐标系,X轴平行于飞机纵轴,向前为正;Y平行于飞机横轴,向右为正;Z轴平行于飞机垂直轴,如图2所示。
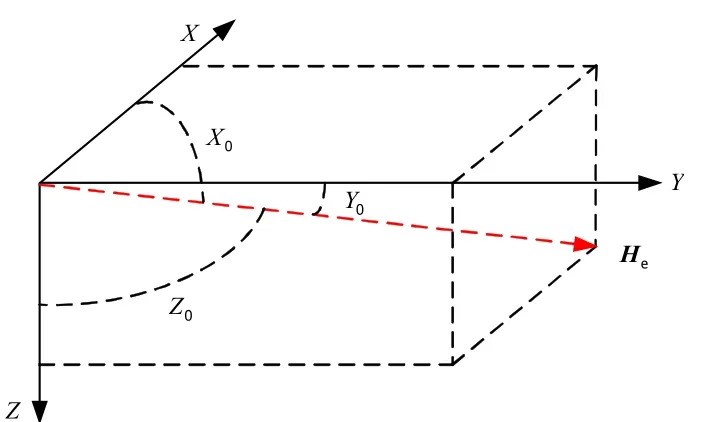
图2 飞机磁场建模坐标系Fig.2 Coordinates of aircraft magnetic field
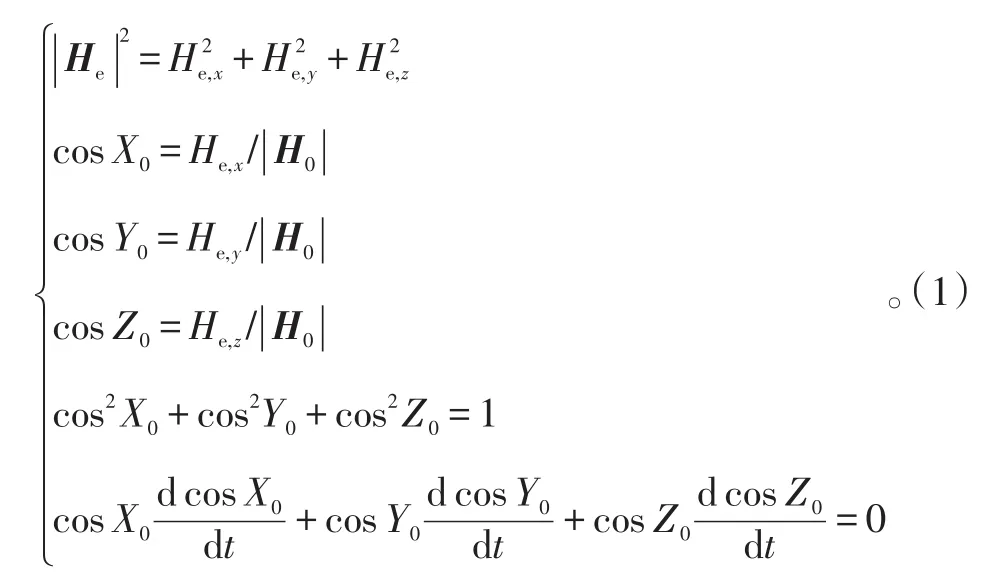
图2中,He表示地磁矢量,大小为地磁场总强度标量值|H0|,地磁矢量和飞机坐标系X、Y、Z轴的夹角X0、Y0、Z0,其方向余弦为(cosX0,cosY0,cosZ0)。
假设He=(He,x,He,y,He,z)T,He,x、He,y、He,z为地磁场矢量在磁探仪坐标系下X、Y、Z轴方向的投影大小(可认为是三分量磁补偿探头输出),有下列关系成立:
根据文献[6]提出的飞机干扰磁场模型,飞机干扰磁场HT主要由恒定场(剩余磁场Hp)、感应场(感应磁场Hi)和涡流场(涡流磁场Hw)组成,即

剩余磁场来自于被磁化的硬铁性材料,其被磁化后退磁困难,大小在短时间内保持恒定,并且与飞机的飞行方向、姿态无关。
剩余磁场可表示为:

式(3)中,Hp,x、Hp,y、Hp,z分别为剩余磁场在X、Y、Z轴方向上的投影大小。
感应磁场是软铁材料被地磁场磁化产生的感应磁场,感应磁场各分量与地磁场在飞机坐标系三轴方向上的投影成正比。
定义感应矩阵K,则感应磁场Hi可以表示为:

涡流磁场是指飞机上的铁磁性材料在磁通量变化时产生的涡流引起的磁场,其各分量与地磁场投影到个坐标轴磁场的变化率成正比,定义涡流矩阵L,涡流磁场可表示为:
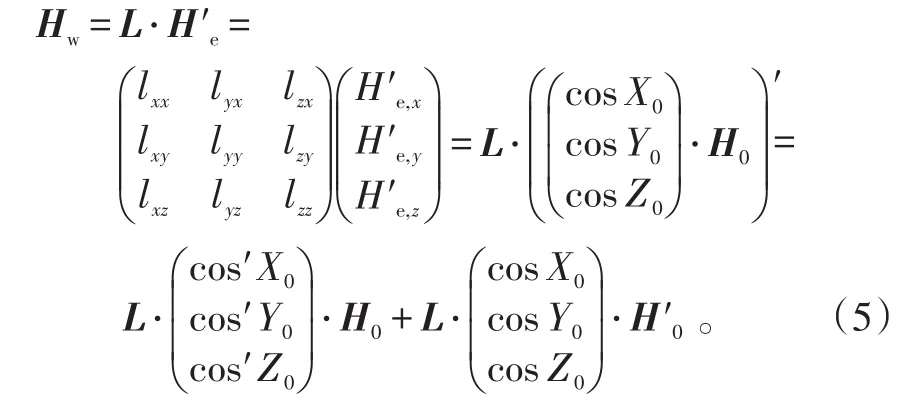
假设磁探仪测得的总磁场为Hg,那么其大小为地磁场总强度H0与飞机干扰磁场HT在地磁场方向上的投影值HTd,即:
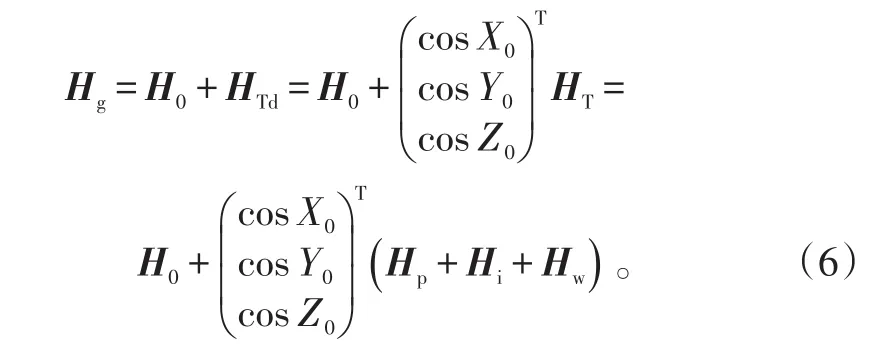
假设飞机所处空间地磁场是均匀的,即H′0=0,那么式(5)最后一项可以移除,利用高通滤波器可以从采集数据中消除地磁场和模型中的不变量,保留下来的就是干扰磁场ΔHg,结合式(1)~(6)整理得到:

2 模型参数求解方法
如果磁探仪和三轴磁补偿探头采集的数据点数为N,那么根据式(7)可以列出含有N个方程的16元线性方程组[8],采用矩阵形式表示如下:
当N>16时,可以看出模型参数的求解实质就是一个超静定方程的求解(线性回归问题的求解),通常最小二乘法是求解超静定方程的合适选择,但是由于模型参数间存在近似的线性关系(即复共线性)以及补偿飞行时数据的局部采样,从而导致矩阵A存在严重的病态性。
在超静定方程求解中,矩阵A病态性对求解系数的稳定性非常大,若此时采用最小二乘法求解系数,则可能得到严重偏离真实值的系数。常规解决模型复共线性的方法,如主成分估计、逐步回归法等[7-14],在模型线性方程存在严重病态时,其估计参S数误差较大且稳定性不高。从工程应用角度出发,采用阻尼最小二乘法,能获得相对较高的参数精度和稳定性。
3 补偿校准飞行方案
为求解模型参数,飞机平台需要进行磁补偿校准飞行以获取由飞机机动引起的干扰磁场数据。飞机的飞行姿态可以分解为横滚、俯仰和偏航3个机动动作,如图3所示;飞机的飞行方向可以分解成4个正交航向中的任意2个方向的组合。因此,补偿校准飞行通常采用在正交航向上分别进行机动动作飞行。
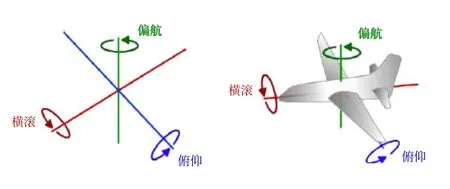
图3 飞机机动动作示意图Fig.3 Model of the aircraft maneuvers
最典型的磁补偿校准飞行是由加拿大国立研究院航空处NAE(NationalAeronautical Establishment)提出的“1/2 FOM机动飞行”,其校准飞行示意如图4所示[15],也是目前航空磁补偿普遍采用的飞行动作。校准飞行是在4个正交的航向(如正北、正东、正南、正西)上做±10°横滚、±5°俯仰、±5°偏航的3组机动飞行,每个机动动作重复做3次,每次时长4~6 s。
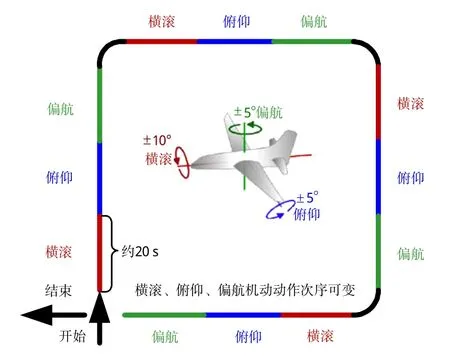
图4 补偿校准飞行示意图Fig.4 Flight sketch of compensation calibration
磁补偿校准飞行主要目的是凸显飞机平台及机动动作引起的磁干扰,如果在低海拔区域进行磁补偿校准飞行,地质结构引起的磁干扰会将飞机机动引起的磁噪声完全掩盖。因此,磁补偿校准飞行通常在高空低地磁梯度区域进行,这样有利于减少地质结构引起的干扰磁场以及去除海浪等海洋环境引起的干扰磁场,从而准确求解飞机磁补偿模型参数[16]。
4 补偿质量评价
磁补偿的质量决定了航空磁探的精度。补偿质量越高,效果越好,也就是飞机机动动作引起的磁干扰的剩余量越小,如何通过一些量化指标方法来衡量补偿后剩余干扰场的大小,就显得尤为关键。目前实际探测工作中主要使用的量化指标包括FOM值(品质因子)、补偿后标准差σc、改善比IR和系数矢量模Mnorm[17-18]。
4.1 品质因子
品质因子(FOM)是由Hood于1967年提出的评价磁补偿效果的一个指标,该方法需要记录每组动作的开始和结束时间,并将与每组机动动作时间相对应的补偿后磁干扰数据的峰峰值(最大值和最小值之差)相加,其总和称之为品质因子。具体方法是:根据飞行日志提前记录获得每组动作的时间段,在每组时间段内计算补偿后磁干扰数据的峰峰值。其公式如下:

式(9)中,Proll,i、Ppitch,i和Pyaw,i表示每个航向(共4个航向)上横滚、俯仰和偏航动作时,剩余干扰磁场的峰峰值。
以某次实际磁补偿校准飞行数据为例,其磁补偿前后剩余干扰噪声如图5所示,事后根据飞机姿态信息和航向数据手动分段确定俯仰、横滚和偏航每组机动动作开始及结束对应位置(如图6所示),由此计算补偿前后每组机动动作对应的剩余干扰噪声峰峰值,见表1、2,可以得出补偿前FOM值为12.77 nT,补偿后FOM值为1.21 nT。
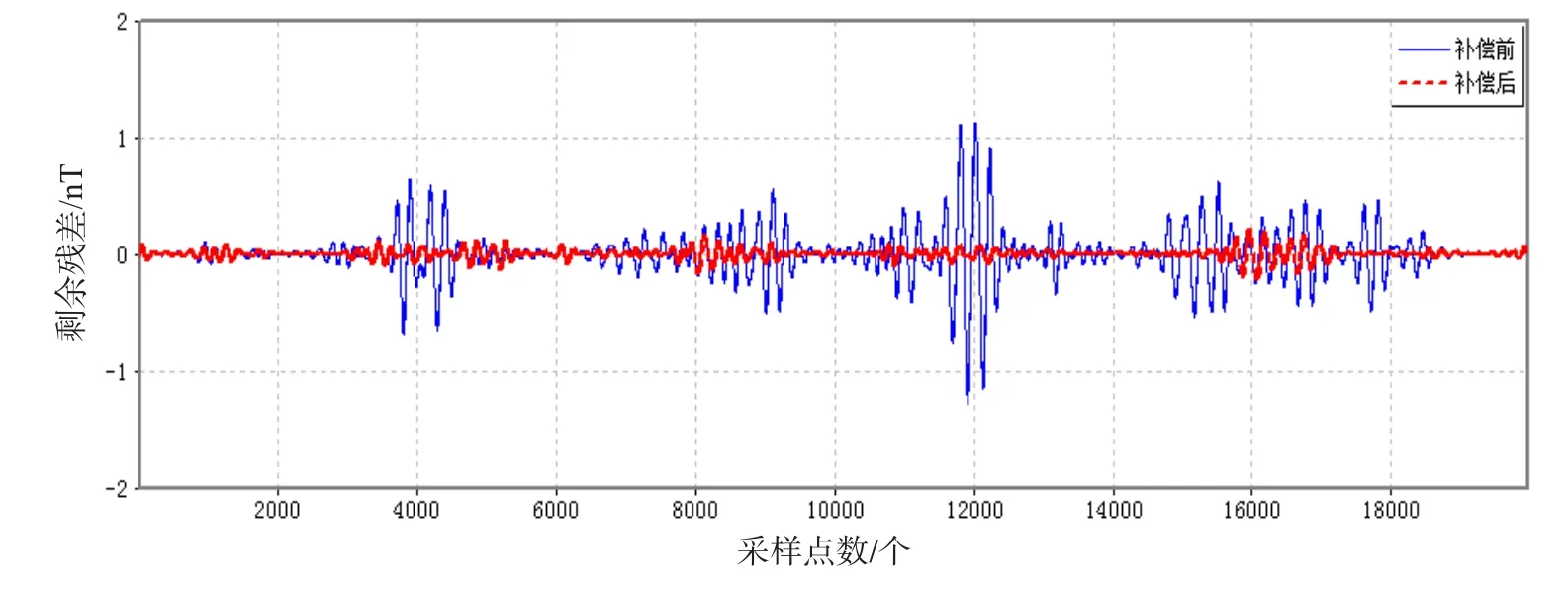
图5 磁补偿前后剩余干扰噪声Fig.5 Residual interference of magnetic field before and after compensation
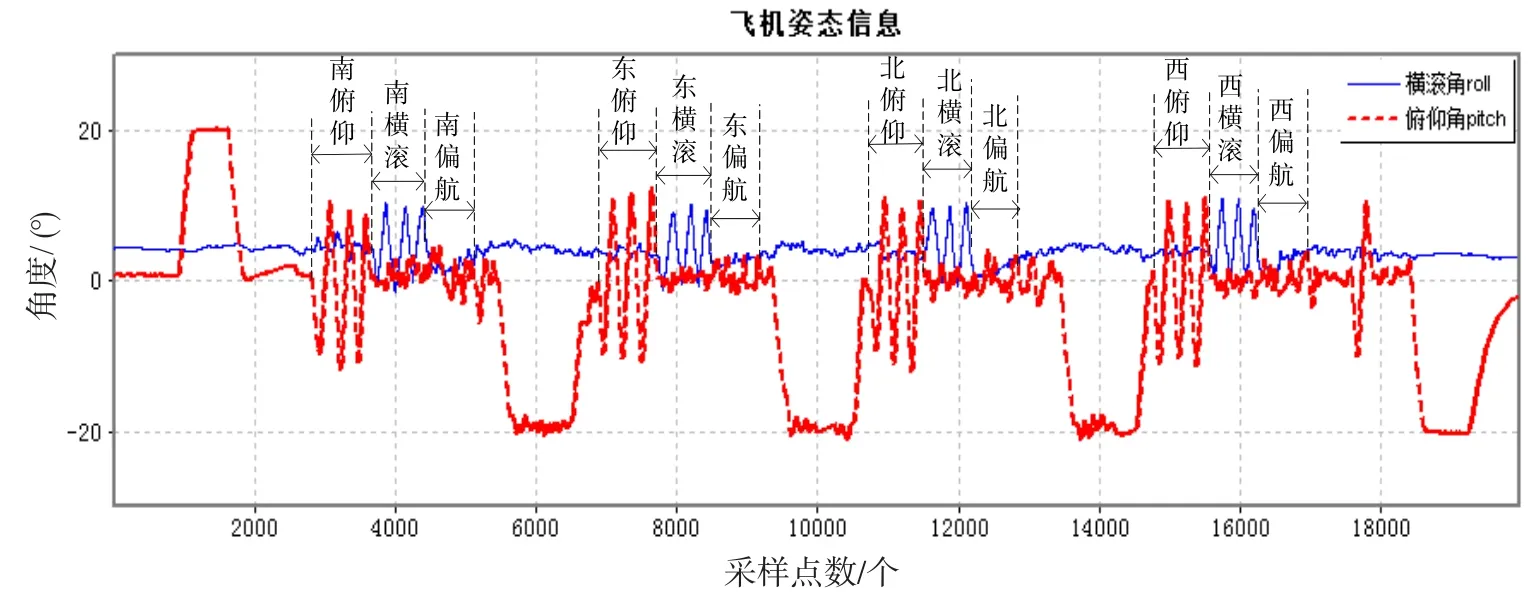
图6 飞机姿态信息分割机动动作Fig.6 Segmentation maneuver based on aircraft attitude information
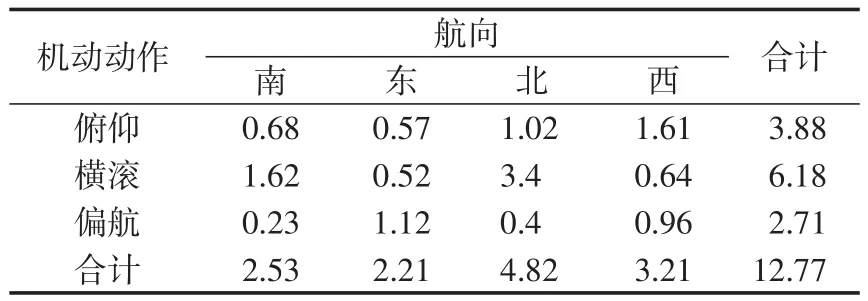
表1 未补偿前FOM值Tab.1 FOM of Uncompensated magnetic field nT
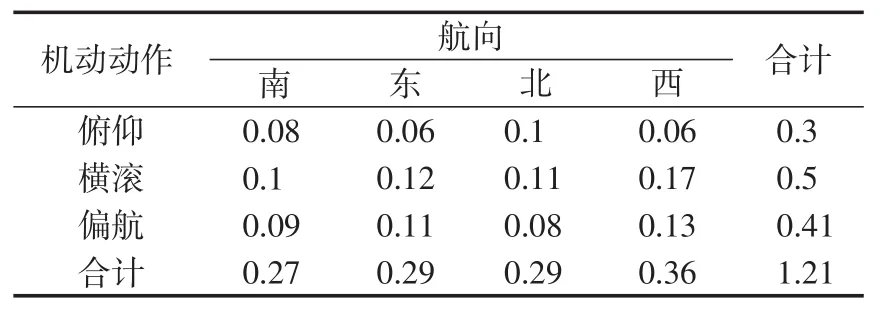
表2 补偿后FOM值Tab.2 FOM of compensated magnetic field nT
从品质因子具体计算方法来看,获取每组动作的时间段非常关键,这会直接影响到求解峰峰值的大小。如果通过自动驾驶来完成磁补偿校准飞行,则可以准确地记录下每组动作的时间段。但大多数情况下,还是通过人工驾驶来完成磁补偿校准飞行,则只能事后手动确定每组动作的开始和结束位置,难以自动计算FOM值,这对于实时飞行探测是非常不方便的,也极容易产生错误。
本文实现了一种自动求取FOM值的方法,该方法能快速、准确地记录每组动作的时间段,从而自动计算FOM,其步骤如下:
1)根据飞机航向数据,采用自动筛选航向算法分
3)通过分离好的横滚姿态数据,提取各航向上横滚动作对应的开始位置nRsi和结束位置nRei。
4)通过分离好的俯仰姿态数据,提取各航向上俯仰动作对应的开始位置nPsi和结束位置nPei。
5)通过分离好的航向姿态数据,提取各航向上偏航动作对应的开始位置nYsi和结束位置nYei
6)根据记录的每个航向上各机动动作开始位置和结束位置,获取补偿前后剩余干扰噪声相对应时间的峰峰值,将各峰峰值相加,得到品质因子FOM值。
4.2 补偿后标准差
补偿后标准差σc是在4个特定方向上做横滚、俯仰、偏航和转弯期间补偿后剩余磁干扰的标准差。
补偿后标准差σc是一个绝对精度指标,其数值大小直接反映补偿后磁干扰噪声的离散程度,是评价磁补偿效果的一个主要指标。通过补偿校准飞行数据分析和相关经验,在整个补偿校准飞行过程,补偿后标准差σc小于0.08 nT可视为合格。以4.1节提到的实际补偿校准飞行数据为例,其补偿后标准差σc=0.051 nT。
4.3 改善比
改善比IR采用在4个方向上做相应动作和转弯期间未补偿信号的标准差σu与补偿后剩余干扰的标准差之比作为评判标准。它的数值反映磁补偿系统的能力。对同一干扰源,改善比最能说明问题,它有助于比较同一架飞机,不同校准飞行哪一次补偿得更好。对于总场标量探测来说,通常改善比IR一般在4~15左右。以4.1节提到的实际补偿校准飞行数据为例,其改善比IR=5.29。
4.4 系数矢量模
系数矢量模Mnorm是指对模型参数向量取模,它反映了获取模型参数的困难程度及模型矩阵的病态程度。其表达式为:
通常,系数矢量模Mnorm小于100。如果Mnorm较高,则指示探头或者其他设备存在故障,又或者是未按要求进行校准飞行。以4.1节提到的实际补偿校准飞行数据为例,其系数矢量模Mnorm=39.2。
5 磁补偿系数求解及效果评价软件实现
本文基于MFC开发了磁补偿系数求解及补偿效果评价软件,如图7所示,为后续深入评价补偿效果奠定了基础。软件只需要输入补偿前总磁场、三分量磁通门数据及飞机姿态数据,即可以求解模型补偿系数和补偿效果评价指标,并进行磁补偿质量评价,评价指标包括补偿后标准差、改善比及系数向量模,并根据评价指标判定补偿质量是否满足要求。
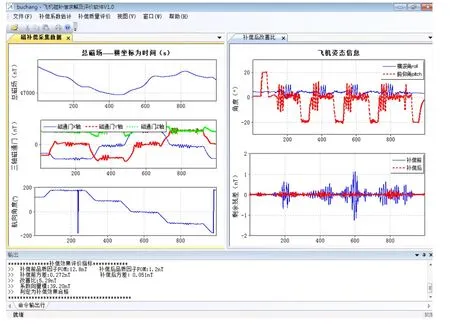
图7 补偿系数求解及补偿质量评价软件Fig.7 Coefficient solving and compensation quality estimation software
6 结论
航磁补偿技术对于高精度航空磁探来说极其重要,其补偿质量直接制约了航空磁探的效果。本文按照航磁补偿的实施过程进行了飞机平台磁干扰建模、模型参数求解方法、补偿校准飞行。另外,对补偿质量评价指标和方法进行了分析,可以看出,采用FOM方法和使用补偿后标准差、改善比及系数矢量模作为评价指标,都能对磁补偿的性能作评估,FOM方法会存在一定的航线分割误差;相比较而言,标准差计算上更具有可操作性,具体采用哪种方法,可根据使用条件选择。
[1]王景然,卢立波,刘浩,等.贝尔直升机航磁仪磁补偿结果分析[J].海洋测绘,2013,33(6):11-13. WANG JINGRAN,LU LIBO,LIU HAO,et al.The magnetic compensation analysis of the aeromagnetic instrument on the bell helicopter[J].Hydrographic Surveying and Charting,2013,33(6):11-13.(in Chinese)
[2]何敬礼.飞机磁补偿的历史、现状及发张趋势[J].物探与化探,1991,10(3):1-7. HE JINGLI.History,Current situation and development trend of aircraft magnetic compensation[J].Geophysical and Geochemical Exploration,1991,10(3):1-7.(in Chinese)
[3]张洪瑞,范正国.2000年来西方国家航空物探技术的若干进展[J].物探与化探,2000,31(1):1-8. ZHANG HONGRUI,FAN ZHENGGUO.Recent advances in aerogeophysical technique[J].Geophysical and Geochemical Exploration,2000,31(1):1-8.(in Chinese)
[4]郑文超,牛夏牧,韩琦.一种改进的航磁补偿系数求解算法[J].智能计算机与应用,2014,4(1):91-93. ZHENG WENCHAO,NIU XIAMU,HAN QI.An improved solution algorithm of magnetic compositon[J].Intelligent Computer and Application,2014,4(1):91-93.(in Chinese)
[5]王林飞,薛典军,段树岭,等.航磁软补偿动作规范性评价[J].物探与化探,2016,40(2):365-369. WANG LINFEI,XUE DIANJUN,DUAN SHULING,et al.The method of quality assessment for digital magnetic compensation and software realization[J].Geophysical and Geochemical Exploration,2016,40(2):365-369.(in Chinese)
[6]LELIAK P.Identification and evaluation of magnetic field sourcesofmagnetic airborne detectorMAD equipped aircraft[J].Transactions on Airspace and Navigational Electronics,1961(8):95-105.
[7]庞学亮,林春生,张宁.飞机磁场模型系数的截断奇异值分解法估计[J].探测与控制学报,2009,31(5):48-51. PANGXUELIANG,LINCHUNSHENG,ZHANG NING.Parameter estimation of airplane magnetic model base on TSVD[J].Journal of Detection and Control,2009,31(5):48-51.(in Chinese)
[8]张宁,林春生.基于改进岭估计的飞行器背景磁干扰的建模与补偿[J].系统工程与电子术,2012,34(5):887-891. ZHANG NING,LIN CHUNSHENG.Modeling and compensation of aircraft magnetic interference based on ameliorated ridge estimation[J].Systems Engineering and Electronics,2012,34(5):887-891.(in Chinese)
[9]还迎春,林春生,周建军.基于飞行器缩比模型的磁干扰补偿模型参数求解[J].海军工程大学学报,2014,26(4):71-74. HUAN YINGCHUN,LIN CHUNSHENG,ZHOU JIANJUN.Solution of parameters for magnetic disturbance compensation model based on aircraft scale model[J]. Journal of Naval University of Engineering,2014,26(4):71-74.(in Chinese)
[10]ZHANG D L,HUANG D N,ZHU B,et al.Aeromagnetic compensation with partial least square regression[C]// The 25thGeophysical Conference and Exhibition.Adelaide,South Australia:ASEG,PESA and AIG,2016:300-303.
[11]周文月,黄大年,于显利,等.航磁测量飞机飞行姿态影响及矫正[J].世界地质,2015,34(1):247-250. ZHOU WENYUE,HUANG DANIAN,YU XIANLI,et al.Attitude affection and correction of aircraft in airborne survey[J].Global Geology,2015,34(1):247-250.(in Chinese)
[12]DOU Z,REN K X,HAN Q,et al.An novel real-time aeromagnetic compensation method based on RLSQ[C]// 10thInternational Conference on Intelligent Information Hiding and Multimedia Signal Processing.IEEE,2014:242-246.
[13]ZHANG N,LIN C S,SHAO S S.Study on model compensation of aircraft magnetic interference[J].Intelligent Computing and Intelligent Systems,2010,10(2):782-785.
[14]JOHN JIA,EIKON P.A new aircraft compensation system for magnetic terrains.OMET P02-03-043[R].Final Report on Improved Aeromagnetic Compensation.Ottawa:Ontario Mineral Exploration Technology Program,2007:23-50.
[15]HARDWICK C D.Aeromagnetic gradiometry and compensation[R].National Research Council of Canada. 1981.
[16]NORIEGA G.Assessing the performance of compensation in aeromagnetic gradiometry[C]//The SAGA 13thBiennial Conference and Exhibition.Skukuza,South Africa,2013:201-206.
[17]NORIEGA G.Performance measures in aeromagnetic compensation[J].Leading Edge,2011,30(10):1122-1127.
[18]NORIEGA G.Aeromagnetic compensation in gradiometry-Performance,modelstability and robustness[J]. Geoscience and Sensing,2015,18(5):2024-2031.
[19]FITZGERALD D J,PERRIN J.Magnetic compensation of survey aircraft[C]//The 14thInternational Congress of the Brazilian Geophysical Society,2015:701-705.
Investigation of Aeromagnetic Compensation Technology and Performance Assessment Method
LIU Shoushan1,TANG Linmu2,XU Qingfeng2,WU Fang3
(1.The 91046thUnit of PLA,Laiyang Shandong 265200,China; 2.Shanghai General Satellite Navigation Co.Ltd.,Shanghai 200040,China; 3.Department of Electronic Information Engineering,NAAU,Yantai Shandong 264001,China)
The purpose of aeromagnetic compensation is to eliminate magnetic interference introduced by the aircraft plat⁃form.For high-precision aeromagnetic exploration,the quality of aeromagnetic compensation directly restricts perfor⁃mance of exploration.According to the implementation steps of aeromagnetic compensation,in this paper,the modeling of aircraft magnetic interference was built,the method of solving the model parameters and the calibration flight plan were put forward.Further,in order to effectively control quality of compensation flight,the quantitative indicators were used to evaluate the effects of aeromagnetic compensation,compensation effect of judging the merits.Finally,based on MFC soft⁃ware development platform,the coefficient solver and performance assessment software for aeromagnetic compensation was developed.
aeromagnetic exploration;magnetic compensation;improvement ratio;assessment index
V243.5
A
1673-1522(2016)06-0641-07
10.7682/j.issn.1673-1522.2016.06.008
2016-09-28;
2016-11-04
刘首善(1982-),男,工程师,大学。
