基于电压前馈解耦的地铁永磁同步电机矢量控制研究
2016-12-23曹成琦
张 凯,秦 斌,王 欣,梁 枫,曹成琦
(湖南工业大学 电气与信息工程学院,湖南 株洲 412007)
基于电压前馈解耦的地铁永磁同步电机矢量控制研究
张 凯,秦 斌,王 欣,梁 枫,曹成琦
(湖南工业大学 电气与信息工程学院,湖南 株洲 412007)
针对传统矢量控制系统中电流环使用PI调节器忽略交直轴电流耦合的问题,采用以d-q轴反馈电流和反馈速度为输入的电压前馈解耦单元,并将经过d-q轴电流调节器的输出作为补偿电压,与电压前馈解耦单元构成复合控制系统。在MATLAB/SIMULINK仿真软件下,搭建永磁同步电机矢量控制系统和电压前馈解耦模型,仿真分析在地铁牵引、惰行、制动3种工况下有负载扰动时的运行情况。仿真结果表明:与传统PI控制器相比,基于电压前馈解耦的PI控制器能使系统具有更好的动态性能。
电压前馈解耦;永磁同步电机;矢量控制
0 引言
永磁同步电机因其高效节能、高功率密度、高功率因数、重量轻等优点,在轨道交通牵引系统中日益受到关注。目前,永磁同步电机的高性能控制方式主要有矢量控制和直接转矩控制。这2种方式都是针对电机的转矩进行高性能控制,而电流控制是实现转矩精确控制的关键[1]。在传统的矢量控制系统中,一般采用PI调节器分别对直轴和交轴电流进行反馈控制。该方法结构简单、易于实现,但是忽略了交直轴电流耦合问题。若其中一轴上电流给定发生变化时,另一轴上电流会产生瞬时误差,从而使转矩产生瞬时畸变,导致系统的动态性能变差[2]。为了解决该问题,文献[3]采用基于无差拍电流控制方法,提高了系统的动态性能,但该方法受电机参数影响大,鲁棒性不强。文献[4]采用神经网络逆系统解耦控制方法,该方法需要大量的实验样本数据进行离线训练,实现起来相对较复杂。
综上所述,为了改善地铁永磁同步电机控制系统的动静态性能,本文采用了电压前馈解耦矢量控制方法。该控制方法以d-q轴反馈电流和反馈速度作为电压前馈解耦单元的输入,并将经过d-q轴电流调节器的输出作为补偿电压,与电压前馈解耦单元共同作用,来实现d-q轴电流环的解耦。本文通过MATLAB/SIMULINK搭建大功率永磁同步电机矢量控制系统的仿真模型,并分别在地铁牵引、惰行、制动3种工况下进行仿真试验。试验结果表明加入电压前馈解耦单元的矢量控制方法能使系统具有更好的动态性能和鲁棒性。
1 数学模型
1.1 永磁同步电机
永磁同步电机是高阶、强耦合、非线性的复杂系统。理想条件下,简化其内部参数。在d-q同步旋转坐标系下,永磁同步电机的基本电压方程为:

式中:ud, uq为定子电压d-q轴分量;
Rs为定子绕组电阻;
id, iq为d-q轴电流分量;
Ld, Lq为定子的d-q轴等效电感。
电磁转矩方程为

式中p为永磁同步电机的极对数。
1.2 电压前馈解耦控制
将式(1)进行变换,得到:

由式(3)可知,采用PI控制器时,状态方程存在耦合项,其输出电压一部分用于抵消反电动势,一部分用来控制d-q轴电流,这样能延长调节时间,降低系统性能。因此,本文通过引入id, iq和r的状态反馈来补偿耦合项,以提高电机的动态性能。电压方程为:

式中u′d, u′q为补偿后的d-q轴电压分量。
将式(4)代入式(3)中,可得:

由式(5)可知,经过补偿后的状态方程没有耦合。电压前馈解耦的电流调节器控制框图如图1所示[5-7]。

图1 电压前馈解耦的电流调节器控制框图Fig.1 Control block diagram of current regulator with voltage feed-forward decoupling
2 永磁同步电机矢量控制系统
本文所设计的永磁同步电机矢量控制系统结构框图如图2所示。其工作原理是:定子三相电流经过Clarke和Park变换得到两相旋转电流id和iq,将这2个电流作为电流环的反馈值,与给定值作比较,得到的信号通过PI调节器,将此输出作为d-q轴电压的补偿值,将反馈电流和反馈速度输入到电压前馈解耦模型,再经过Park逆变换得到电压信号,输入到SVPWM控制算法模块,得到脉冲信号,以实现永磁同步电机的控制[8-10]。当采用id=0的矢量控制方法时,定子电流矢量位于q轴,而无d轴分量,即定子电流全部用来产生转矩,电磁转矩只与定子电流的幅值成正比,该方法使控制系统简单,转矩波动小,可获得较宽的调速范围。加入电压前馈解耦单元后,永磁同步电机矢量控制系统的动态性能更好。

图2 基于电压前馈解耦的永磁同步电机矢量控制系统结构框图Fig.2 Structure diagram PMSM vector control system based on voltage feedforward decoupling
3 仿真分析
地铁车辆的运行分为3种工况:牵引、惰行、制动。牵引是地铁车辆在牵引电机的带动下,做加速前进;惰行是地铁车辆到达给定速度后,此时没有牵引力作用,允许地铁车辆在惯性的作用下,继续前进;制动是地铁车辆由于要到达目的地,需要刹车,车辆进入减速阶段[12-13]。地铁车辆的运行工况如图3所示。

图3 牵引系统运行的3种工况Fig.3 Three operating conditions under the traction system
本文通过MATLAB/SIMULINK搭建了基于电压前馈解耦的PI控制器和传统PI控制器的仿真模型,分析了2种控制器在地铁牵引、惰行、制动3种工况下的运行情况。仿真时所用大功率永磁同步牵引电机的参数设置如下:定子电阻R=0.285,d-q轴的电感为2.5 mH,极对数为4对,f=0.75 Wb,直流侧电压为1 500 V。由于仿真试验条件与实际运行有差距,假设地铁在牵引、惰行、制动3种工况的总运行时间为1.4 s,且牵引制动时,作恒加减速度的理想处理。启动时,电机给定负载为100 N·m。在0.8 s时,电机给定负载增大为300 N·m。给定转速是从0 r/min增加到1 200 r/min,再减少至600 r/min,最后减速至0 r/min的动态变化。传统PI控制器和基于电压前馈解耦的PI控制器2种模型的仿真波形如图4~6所示。

图4 传统PI控制器的仿真波形图Fig.4 Simulation wave-forms of the traditional PI controller
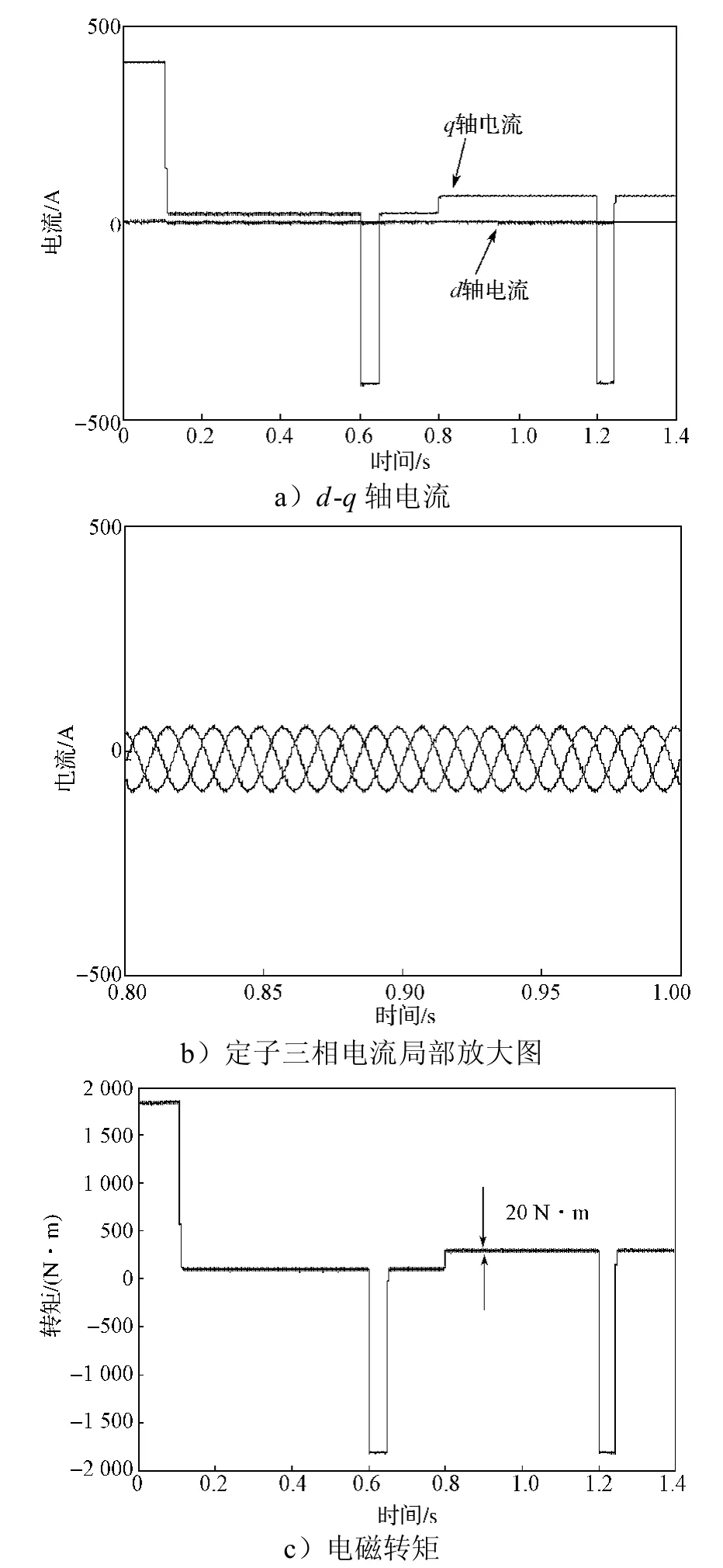
图5 基于电压前馈解耦的PI控制器的仿真波形图Fig.5 Simulation wave-forms of PI controller based on voltage feed-forward decoupling

图6 2种控制方法的转速比较图Fig.6 Comparison diagram of rotational speed with two controlling methods
由图4~6的仿真结果可知:
1)传统PI控制器的d-q轴电流脉动较大,在转速和负载突变的位置有波动,而基于电压前馈解耦的PI控制器的d-q轴电流响应良好,且符合id=0的控制策略。
2)由定子三相电流局部放大图对比可知,基于电压前馈解耦的PI控制器的电流响应较平滑,比传统PI控制器的波形畸变小。
3)相对于传统PI控制器,基于电压前馈解耦的PI控制器的转矩脉动比较平滑,且脉动较小,约为传统PI控制器的一半。
4)从转速波形对比可知,2种控制方法都能够快速达到给定速度,但基于电压前馈解耦的PI控制器达到给定速度的时间更短。
4 结语
针对传统矢量控制系统中速度和电流环使用PI控制器忽略交直轴电流耦合的问题,本文设计了一种基于电压前馈解耦的PI控制器。在地铁运行的3种工况下,将本控制器与PI控制器进行仿真分析。仿真结果表明:加入电压前馈解耦的PI控制器使转矩脉动平滑且脉动较小,提高了系统的动态响应,性能良好。本控制器能应用于地铁、电动车等领域。
[1]徐艳平,钟彦儒,杨 惠. 永磁同步电机矢量控制和直接转矩控制的研究[J]. 电力电子技术,2008,42(1):60-62. XU Yanping,ZHONG Yanru,YANG Hui. Research on Vector Control and Direct Torque Control of Permanent Magnet Synchronous Motor[J]. Power Electronics,2008,42 (1):60-62.
[2]周华伟,温旭辉,赵 峰,等. 基于内模的永磁同步电机滑模电流解耦控制[J]. 中国电机工程学报,2012,32 (15):91-99. ZHOU Huawei,WEN Xuhui,ZHAO Feng,et al. Decoupled Current Control of Permanent Magnet Synchronous Motors Drives with Sliding Mode Control Strategy Based on Internal Model[J]. Proceedings of the CSEE,2012,32 (15):91-99.
[3] 林连冬. 基于无差拍控制的PMSM电流预测控制算法[J].电子测量技术,2013,36(10):38-42. LIN Liandong. Predictive Current Control Scheme for Permanent Magnet Synchronous Motor Based on Deadbeat Control[J]. Electronic Measurement Technology,2013,36 (10):38-42.
[4]刘贤兴,胡育文. 永磁同步电机的神经网络逆动态解耦控制[J]. 中国电机工程学报,2007,27(27):72-76. LIU Xianxing,HU Yuwen. Dynamic Decoupling Control of PMSM Based on Neural Network Inverse Method[J]. Proceedings of the CSEE,2007,27 (27):72-76.
[5]卞延庆,庄 海,张颖杰. 永磁同步电机电流环电压前馈解耦控制[J]. 微电机,2015,48(7):68-72. BIAN Yanqing,ZHUANG Hai,ZHANG Yingjie. Decoupling Control Current Loops for Permanent Magnet Synchronous Motor Based on Voltage Feedforward[J]. Micro Motors,2015,48 (7):68-72.
[6]邱忠才,肖 建,郭冀岭,等. 永磁同步电机速度预测电流解耦控制[J]. 电子测量与仪器学报,2015,29(5):648-654. QIU Zhongcai,XIAO Jian,GUO Jiling,et al. PMSM Control System Based on Speed Predictive Controller and Current Decouple Controller[J]. Journal of Electronic Measurement and Instrumentation,2015,29(5):648-654.
[7]邓仁燕,唐 娟,夏 炎,等. 基于前馈补偿的永磁同步电机电流环解耦控制[J]. 电力电子技术,2013,47(6):68-70. DENG Renyan,TANG Juan,XIA Yan,et al. Decoupling Control of Current Loops for Permanent Magnet Synchronous Motor Based on Feedforward Compensation [J]. Power Electronics,2013,47(6):68-70.
[8]龚事引,于惠钧,宋翼颉,等. 基于模糊PID的永磁同步电机矢量控制系统[J]. 湖南工业大学学报,2015,29 (4):40-44. GONG Shiyin,YU Huijun,SONG Yijie,et al. PMSM Vector Control System Based on Fuzzy PID[J]. Journal of Hunan University of Technology,2015,29(4):40-44.
[9]秦灿华,刘连根,曹 洋,等. MW级永磁同步电机无速度传感器矢量控制研究[J]. 湖南工业大学学报,2012,26(1):37-40. QIN Canhua,LIU Liangen,CAO Yang,et al. Research on Sensorless Vector Control of MW Turbine Permanent Magnet Synchronous Motor[J]. Journal of Hunan University of Technology,2012,26(1):37-40.
[10]孙延军,谭 兮,冯鹏辉,等. 基于MRAS的永磁同步电机矢量控制系统[J]. 湖南工业大学学报,2013,27(5):49-52. SUN Yanjun,TAN Xi,FENG Penghui,et al. MRASBased PMSM Vector Control System[J]. Journal of Hunan University of Technology,2013,27 (5):49-52.
[11]王 伟,张 峰,皇甫小燕,等. 地铁车辆异步电机矢量控制系统的研究[J]. 电力电子技术,2009,43(12):16-18. WANG Wei,ZHANG Feng,HUANGFU Xiaoyan,et al. Research on the Asynchronous Motor Vector Control System of the Metro Vehicles[J]. Power Electronics,2009,43(12):16-18.
[12]陶彩霞,杨艳萍,李 霄. 地铁牵引电机牵引特性仿真研究[J]. 自动化与仪器仪表,2012(6):25-27. TAO Caixia,YANG Yanping,LI Xiao. Simulation Research on Traction Characteristics of Metro Traction Motor[J]. Automation and Instrumentation,2012(6):25-27.
[13]孟 月. 列车牵引控制仿真研究[D]. 北京:北京交通大学,2015. MENG Yue. Simulation Study on Train Traction Control [D]. Beijing:Beijing Jiaotong University,2015.
[14]宋文胜,冯晓云. 电力牵引交流传动控制与调制技术[M].北京:科学出版社,2014:38-43. SONG Wensheng,FENG Xiaoyun. Control and Modulation Technologies Under Electric Traction AC Drives [M]. Beijing:Science Press,2014:38-43.
[15]闫 磊,郭 枫. 永磁同步牵引系统在沈阳地铁2号线地铁车辆上的应用[J]. 机车电传动,2013(3):46-48. YAN Lei,GUO Feng. Application of Permanent Synchronous Motor Traction System in Shenyang Metro Line 2 Vehicles[J]. Electric Drive for Locomotives,2013 (3):46-48.
(责任编辑:邓 彬)
Research on Vector Control of Metro Permanent Magnet Synchronous Motor Based on Voltage Feed-Forward Decoupling
ZHANG Kai,QIN bin,WANG Xin,LIANG Feng,CAO Chengqi
(School of Electrical and Information Engineering,Hunan University of Technology,Zhuzhou Hunan 412007,China)
In view of the flaw exhibited by the current loop in the conventional vector control system when using PI regulator without quadrature-direct axis current coupling, with d-q axis feedback current and feedback speed the input voltage feed forward decoupling unit, the output of the d-q axis current regulator serves as the compensation voltage, thus forming a compound control system with the voltage feed forward decoupling unit combined together. The vector control system of permanent magnet synchronous motor and the voltage feed forward decoupling model are set up under the MATLAB/SIMULINK simulation software, followed by a simulation analysis of the operating condition with load disturbance under three operating modes of metro traction, coasting and braking. The simulation results show that, compared with that of the traditional PI controller, the system of the PI controller based on voltage feed-forward decoupling is relatively superior in that it exhibits a better dynamic performance.
voltage feed-forward decoupling;permanent magnet synchronous motor;vector control
TM351
A
1673-9833(2016)05-0022-05
10.3969/j.issn.1673-9833.2016.05.005
2016-07-02
湖南省科技计划基金资助重点项目(2014FJ2018),湖南省自然科学基金资助项目(13JJ3110),湖南省教育厅科研基金资助重点项目(15A050),湖南省研究生创新基金资助项目(CX2015B564)
张 凯(1990-),男,湖北黄冈人,湖南工业大学硕士生,主要研究方向为现代电力电子技术及系统,E-mail:zhangkai301@qq.com
秦 斌(1963-),男,湖南永州人,湖南工业大学教授,博士,主要从事复杂工业过程建模与优化控制方面的教学与研究,E-mail:qinbin99@163.com
