一类不确定非完整系统的控制器设计
2016-12-23马新
马 新
(淮南师范学院 金融学院,安徽 淮南 232001)
一类不确定非完整系统的控制器设计
马 新
(淮南师范学院 金融学院,安徽 淮南 232001)
考虑一类具有非线性漂移控制方向未知的非完整系统的鲁棒控制问题.在控制器设计中,为使状态转换有效和防止有限时间逃逸现象的产生,应用积分反推技术和引用牛子伯曼增益函数,对系统的第一个子系统施行状态测量的切换控制方案,避免在小的邻域有过大的控制率的发生,并得到了系统是全局渐进稳定的.最后,通过一个数值仿真验证了所提算法的正确有效性.
非线性漂移;鲁棒控制;积分反推;牛子伯曼增益;全局渐进稳定
近年来, 非完整动态系统已成为非线性控制研究的热点之一.但已有结论大多是通过时变或非光滑状态反馈控制律来完成系统的渐近(指数)镇定的.有许多非完整约束的机械系统通过适当的变换都能够局部或者全局转换成扩张的链式标准型, 如:移动机器人, 垂直滚动的轮子,欠驱动的空间飞行器等.为了使非完整控制系统渐进稳定,已经有许多的非线性控制技术对其加以应用,如:鲁棒状态反馈控制律[1],将input-state scaling变换方式与back stepping反推法相结合,应用于非完整控制系统的镇定[1-3]、非光滑反馈技术等[4-6],文献[6]中分别用变结构控制的方法和时变控制的方法得到了一般的Brockett系统模型指数稳定的条件.对这类非完整链式系统在非调节反馈线性化下得到稳定反馈控制率[7].文献[8]给出了当非完整系统被强不确定漂移扰动时系统的渐进和指数稳定性的分析.文献[9]中考虑带有不确定非线性项和扰动的链式非完整系统的鲁棒渐进全局稳定问题,取得了很好的效果.文献[10]在存在参数不确定性与外界干扰的情况下,提出一种自适应模糊滑模控制器,使系统的广义坐标与广义速度收敛到预先给定的界内.
本文将在文献[9]的基础上研究一类不确定非完整系统的控制问题,将状态测量技术和回归反推技术结合设计控制器,该控制器能使系统的状态收敛到原点.为了使状态测量有效和阻止有限逃逸现象的发生,对第一个子系统应用基于状态测量的切换控制方案使其渐进稳定.
1 系统描述
考虑有不确定项的非完整系统
(1)
其中,u0,u是控制输入;x0∈R1、x=(x1,x2)T∈R2是状态;d是虚拟扰动控制方向.
这个系统满足文献[9]中的假设1的要求,假设1的要求使得不确定非线性项满足三角条件,从而明确原点是系统(1)的稳定点.控制器设计分为两步,来处理系统(1)固有的三角结构. 第一步,为了使x0-子系统全局渐进稳定,设计控制u0,第二步,为了保证不确定非完整系统(1)剩余的状态都收敛到零,设计控制u.
首先,取控制u0为
u0=-λ0x0
(2)
λ0是正的设计参数.
对系统(1),引入下面定义的状态比例非连续转换
(3)
在新的z-坐标变换下,x-子系统被转化成
(4)
对如(2)式给出的u0, 被转化的系统(4)是定义在x0≠0上. 将(4)写成一个紧凑的形式
(5)
2 反推设计
这部分设计当x0(0)≠0时的控制u.对变换系统(5)基于反推的方法设计控制输入u, 一旦真正的控制输入u出现,这个递推过程就停止.
系统(5)中的z1-子系统
(6)

选择一个虚拟控制函数α1和一个新的变量ξ2为
α1(x0,z1)=λ1z1-(1-λ0)z1
(7)
ξ2=z2-α1(x0,z1)
(8)

(9)

最后, 选择控制率u=α2(x0,z1,z2)为
u=λ0ξ1+(ξ2+α1)-λ0ξ2
(10)
由文献[9]知ξ1,ξ2有界.通过式子(7)对α1的定义,z1,z2和α1都是有界的.再次由式子(7)中的α1的ξ1指数稳定和zi的有界保证α1和zi都是指数收敛的. 再由转换(3)可以得到x1=z1x0. 这说明只要选择合适的λ0,λ1,就可以保证闭环系统(1)的状态x是指数收敛的,当在初始条件x0(0)非零的条件下.
定理1[9]在假设1的条件下对系统(1)应用控制方案(10)和(2), 并选择合适的设计参数λ0,λ1,则闭环系统是全局渐进稳定的,并且只要初始条件x0(0)是非零的,系统的状态x是指数调节到零的.
3 仿真研究
对于给定的系统(1),参数取值为d1,λ0=1,λ1=1.初始值为x0(0)=-4,x1(0)=0.2,x2(0)=15.仿真图像如图1和图2所示.其中图1是控制律u0(t),u(t)随时间的变化曲线,图2是状态x0(t),x1(t),x2(t)随时间的变化曲线.
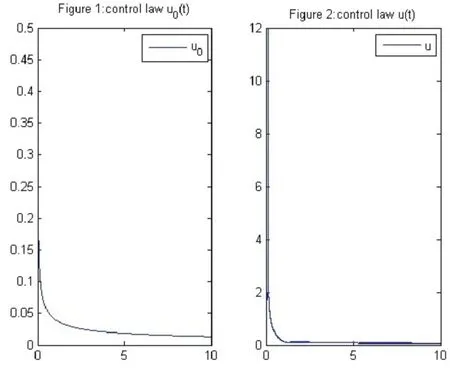
图1 控制律随时间的变化曲线
由图1可知,控制律u0(t)在10秒内非常接近于零, 而控制律u(t)在1秒内迅速接近于零, 在5秒时达到零并永远保持为零.
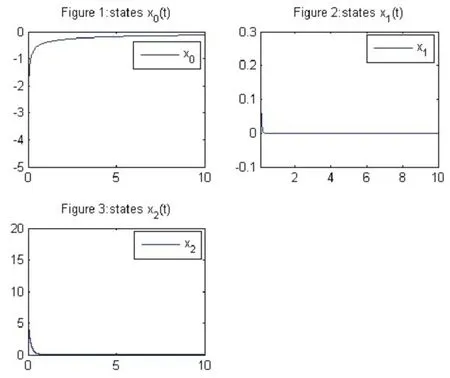
图2 状态随时间的变化曲线
由图2可以看出,状态x0(t)在10秒内接近零, 而状态x1(t)则在0.3秒时达到零并一直保持为零,状态x2(t)在大约0.6秒时收敛到零,并一直保持为零.由此可知该控制方案避免了在小的邻域有过大的控制率的发生, 防止有限逃逸现象的发生, 保证了x系统的全局指数稳定性.
4 结论
本文研究了一类不确定非完整系统的鲁棒控制问题,对该系统将状态测量技术和回归反推技术相结合设计控制器,它能够使得系统的状态收敛到原点,同时避免了在小的邻域有过大的控制率的发生.为了使状态测量有效和阻止有限逃逸现象的发生,对于第一个子系统应用基于状态测量的切换控制方案得到渐进稳定.在设计鲁棒控制器的过程中应用了积分反推的技术和引用了牛子伯曼增益函数,保证了x系统的全局指数稳定性.仿真结果充分显示了该控制策略的有效性.
[1]袁占平,王祝萍,陈启军.一类不确定非完整系统的鲁棒镇定[J].同济大学学报,2009,37(2):277-280.
[2]李飞翔.不确定非完整系统的自适应有限时间镇定[J].常熟理工学院学报,2011,25(10):48-52.
[3]高芳征,杨俊,袁付顺.一类不确定非完整系统的鲁棒自适应衰减问题[J].西南大学学报,2010,32(5):15-19.
[4]I Kolmanovsky,N H McClamroch.Developments in nonholonomic control problems[J].IEEE Control System Magazine,1995,15(6):20-36.
[5]O J Sordalen,O Egeland.Exponential stabilization of nonholonomic chained systems[J].IEEE Transaction Automatic Control,1995,40(1):35-49.
[6]L W Xu,W Huo.Variable structure exponential stabilization of chained systems based on the extended nonholonomic integrator[J].Systems & Control Letters,2000,41(3):225-235.
[7]Z D Sun,S S Ge,W Huo.Stabilization of nonholonomic chained systems via nonregular feedback linearization[J].Systems & Control Letters,2001,44(3):279-289.
[8]M K Bennani,P Rouchon. Robust stabilization of flat and chained systems[J].European Control Conference,1995:2642-2646.
[9]马新.控制方向未知的不确定非完整系统的控制器设计[J].淮南师范学院学报,2010,12(3):9-13.
[10]王声远,霍伟.不确定非完整动力系统的自适应模糊滑模控制器[J].控制理论与应用,2003,20(3):427-431.
(责任编辑:陈衍峰)
2016-05-15
国家自然科学基金青年基金项目“几类Plateaued函数的构造及其在线性码构造中的应用”(11601177);安徽省教育厅科研项目(SK2015A158);安徽省高校自然科学研究项目(KJ2015A256);淮南师范学院校级自然科学研究项目“一类不确定非完整系统的控制器设计”(2014xj47)
马新,女,山东高密人,讲师.
O231.2
A
1008-7974(2016)05-0030-03
10.13877/j.cnki.cn22-1284.2016.10.010