激光陀螺相邻模零偏差及不平衡电流零偏差性能分析
2016-12-23韩宗虎胡晓东赵小宁
韩宗虎,李 俊,王 珂,胡晓东,赵小宁
(西安飞行自动控制研究所,西安 710065)
激光陀螺相邻模零偏差及不平衡电流零偏差性能分析
韩宗虎,李 俊,王 珂,胡晓东,赵小宁
(西安飞行自动控制研究所,西安 710065)
通过控制参量提高陀螺精度和成品率,是激光陀螺工程技术研究的主要内容之一。引入相邻模陀螺零偏差及不平衡电流零偏差两个参量,对不同等级表陀螺对应参量的研究,发现陀螺性能与该参量具有确定的关系,通过控制这两个参量,可以有效提高陀螺使用精度和成品率。理论研究了两个参数变化的根源,分别为谐振腔参数及锁区的变化,为提高激光陀螺精度提供了一种有效的技术途径,对于进一步提高抖动陀螺精度具有实用价值。
激光陀螺;零偏;相邻模零偏差;不平衡电流零偏差
激光陀螺具有启动快、可靠性高、寿命长、动态范围宽、数字输出、使用成本低等诸多优点,已成为目前高精度惯性导航系统的首选惯性传感器,广泛应用于各种捷联惯性导航系统中[1-4]。惯性导航系统精度在很大程度上依赖陀螺等惯性器件的精度,如何选取综合控制参量,研究和分析参量的内在根源,确定和验证这些参量与陀螺精度的相关性,并用于分离陀螺误差,提高陀螺精度,是激光陀螺研制的关键技术之一。
激光陀螺中存在反射镜损耗/背向散射[5]、放电激励、谐振腔参数[6]、朗缪尔流、锁区[7]、环境多物理场作用[8]等误差源,经过多年对误差机理及陀螺性能参数的研究分析,发展了一套激光陀螺测试和评估系统,包括开机零偏误差、定温零偏误差、变温零偏误差等测量参数,以此确定激光陀螺精度和产品等级。随着激光陀螺应用领域拓展和使用需求提升,在进一步提高控制评估参量的同时,还需要引入新的陀螺控制状态和控制参数,才能更全面反映激光陀螺内部误差源,完善健全测试评估系统。
本文引入陀螺相邻模零偏差以及不平衡电流零偏差两个参量,通过对不同等级激光陀螺相应参量的研究,揭示了陀螺性能与两个参量的关系。同时,利用谐振腔参数与陀螺零偏误差理论、抖动偏频激光陀螺偏频/加噪理论,研究了两个参数变化的根源。这两个参数的引入,为降低快速过锁锁区,综合评价谐振腔装配及加工参数,寻求到了一种有效的技术途径,这对陀螺使用精度和成品率的提高也具有实用价值。
1 参数引入及其测试方法
激光陀螺的零偏误差在陀螺性能评估及使用精度中涵盖了陀螺的零偏稳定性、零偏重复性以及零偏温度灵敏度及温度梯度零偏灵敏度等多个指标,能够反映陀螺反射镜损耗/散射、陀螺工作过程中谐振腔性能变化以及加噪参数等内在因素对陀螺的影响,而这些因素最终可以经过简化和集成归结为激光陀螺锁区以及谐振腔参数变化的影响。通过研究表明,在一定的体系参数控制情况下,这两个参量具有相当的代表性和系统性。
激光陀螺锁区在很大程度上由构成激光陀螺环形谐振腔的反射镜背向散射确定,而不同反射镜的背向散射具有相干性,使得在谐振腔在不同模式工作下,反射镜背向散射的矢量和不同,从而具有相邻模式的背向散射矢量和不同,对应的锁区也不同[5],近而提出相邻模零偏差参量,可以有效地反映陀螺锁区的影响。同时,谐振腔参数对激光陀螺性能的影响主要集中在振荡激光光束相对与放电孔径位置关系,涉及到谐振腔加工误差、装调误差等各个环节,因此,综合朗缪尔流误差,引入不平衡电流零偏差参量,也可有效地反映陀螺谐振腔参数变化的影响。
鉴于此,引入相邻模零偏差以及不平衡电流零偏差两个参量,在陀螺稳定状态下,通过性能测试分析,研究这两参量与陀螺最终综合性能的关系,以此指导陀螺精度提高的方向。
1.1 相邻模零偏差参量B0m
置陀螺于稳定带有温箱的测试转台,安装基准和转台台面固定,与控制电子系统连接,使其处于最佳控制状态。设定陀螺工作模式,测量处于模式1状态下陀螺零偏,改变陀螺控制使陀螺工作在模式2上,相同的方法得到该模式下陀螺零偏。为研究相间模式零偏,也可设置控制模式使陀螺工作在的模式3上,测得相应的陀螺零偏。其中,模式1、2、3之间仅差一个激光振荡纵模。定义相邻模零偏差参量B0m12:

式中:B01为模式1工作状态下陀螺零偏,B02为模式2工作状态下陀螺零偏,单位均为(°)/h。相间模零偏差参量B0m13为

式中:为模式3工作状态下陀螺零偏。
为消除其他因素对参量测试结果的影响,陀螺每次测试前温箱需要保持恒温一段时间;同时,为消除测量系统误差和测量数据随机误差,在测量模式1及模式2对应陀螺零偏时,可采用多次测量平均方法。
1.2 不平衡电流零偏差参量B0i
陀螺试验和安装状态与相邻模式零偏差测量相同。在陀螺处于稳态和温度平衡下,控制陀螺放电电流差,分别测量陀螺的零偏,测量方法同 1.1节。定义不平衡电流零偏差参量B0i:

式中:B00为特定模式下,陀螺放电电流对称下的陀螺零偏;B0i为同样模式下,陀螺放电流一边不变,另一边变化一个确定值时的陀螺零偏。根据陀螺精度水平,可以适当提高与降低该电流差值,本文确定的电流差值为0.05mA。
为保证测量数据的真实性和准确性,同样需要确保恒温测量状态以及多次测量平均数据。
1.3 相邻模及相间模零偏差
在相邻模零偏差及相间模零偏差测试过程中,存在陀螺控制和工作状态的改变。相邻模零偏差测试涉及到相差一个纵模的陀螺工作模式状态改变,相间模零偏差测试则涉及两个纵模的陀螺工作模式改变。经过分析和试验证明,相邻模的锁区差异最大,相间模的锁区差异小。因此,相邻模零偏差测试过程中选择陀螺分别工作在奇数模及偶数模上,使得两个工作状态的锁区差异最大,可以充分扩大锁区差异对陀螺零偏的影响,而相间模零偏差涉及锁区改变较小,但同样也可用于验证工作模式改变(对应于谐振腔状态改变)引起的零偏变化,以确定在陀螺工作状态改变情况下,锁区引起的零偏变化大还是谐振腔状态引起的零偏变化大。陀螺测试得到的典型数据如表1所示。
根据1#和2#示例陀螺静态常温试验结果,锁区差异小的相间模1与3的零偏差值分别为0.0347 (°)/h和0.0024 (°)/h,而锁区差异大的相邻模零偏变化则分别为0.354 (°)/h和0.1784 (°)/h,比相间模零偏大一个数量级。对比分析可知,陀螺的零偏变化主要是锁区变化引起的,同时,根据陀螺相间模零偏差数值也可看出,谐振腔状态的改变对陀螺零偏也是有影响的。

表1 陀螺静态常温情况下三个相邻模零偏测试结果Tab.1 Test results of three adjacent modes under the condition of gyro static ambient temperature
2 陀螺综合等级评价与引入参数的关系
分别取一级表、二级表、三级表各10只,分析引入参数与陀螺最终评级的关系。由于引入的相邻模零偏差和不平衡电流零偏差两个参数,分别与谐振腔参数和陀螺锁区相关,因此,为突出影响因素,研究试验中,保证陀螺谐振腔处于温度平衡状态,且控制参量不变,变化因素仅有工作模式和放电电流。具体数据如表2、表3、表4所示。
根据表2、表3和表4中对一级表、二级表、三级表陀螺在三个特征温度点下的测试数据可知:在一级表中,普遍具有相邻模零偏差δB0m及不平衡电流零偏差δB0i较小的特征,且两个参量数值相当,分别为0.00174 (°)/h和0.00172 (°)/h。谐振腔参数及锁区参数的影响基本相当,说明陀螺工作中所选取的电流差值与目前一级表陀螺的锁区影响差值相当,激励因子合适。相比而言,二级表和三级表则要大很多:二级表两参数均值分别达到 0.00526 (°)/h和 0.005 (°)/h,比一级表对应参数大3倍左右;三级表两参数均值分别达到0.00757 (°)/h和 0.00477 (°)/h,比一级表对应参数大4.3倍和2.8倍,就与锁区相关的相邻模零偏差而言,比二级表大1.5倍。
由三个表中的测试数据对比可知,一级表两个参量的平均值比二级表、三级表小很多,比值在1/3甚至更低,并且在相同激励条件下,二级表和三级表中谐振腔参数及锁区参数的影响存在差异。相比而言,锁区影响更大一些,而谐振腔参数影响基本相当。
应该指出的是,激光陀螺最终等级及精度还受到其他多种因素的影响,并不能完全由这两个参数确定,只是对原来测试评估系统的补充。这两个参数是抖动陀螺处于温度平衡条件下得到的,因此,没有涵盖激光陀螺变温[9]、磁灵敏度[10]以及振动[11]等特性。如表3中的第4、第5及第10号陀螺,各自的均值都小于0.002 (°)/h,已与一级表相当,但是综合测评仍为二级表;表4中的第2、第4号陀螺,各自的均值都小于0.002 (°)/h,与一级表相当,但仍综合测评为三级表。因此,激光陀螺等级提升除了优化控制这两个对总体性能起着非常关键作用的参数外,还必须同时研究和抑制其他因素对激光陀螺总体性能的影响。

表2 一级表中的相邻模零偏差和不平衡电流零偏差Tab.2 Bias differences of adjacent modes and unbalance discharge in the first grade of gyros

表3 二级表中相邻模零偏差和不平衡电流零偏差Tab.3 Bias differences of adjacent modes and unbalance discharge in the second grade of gyros
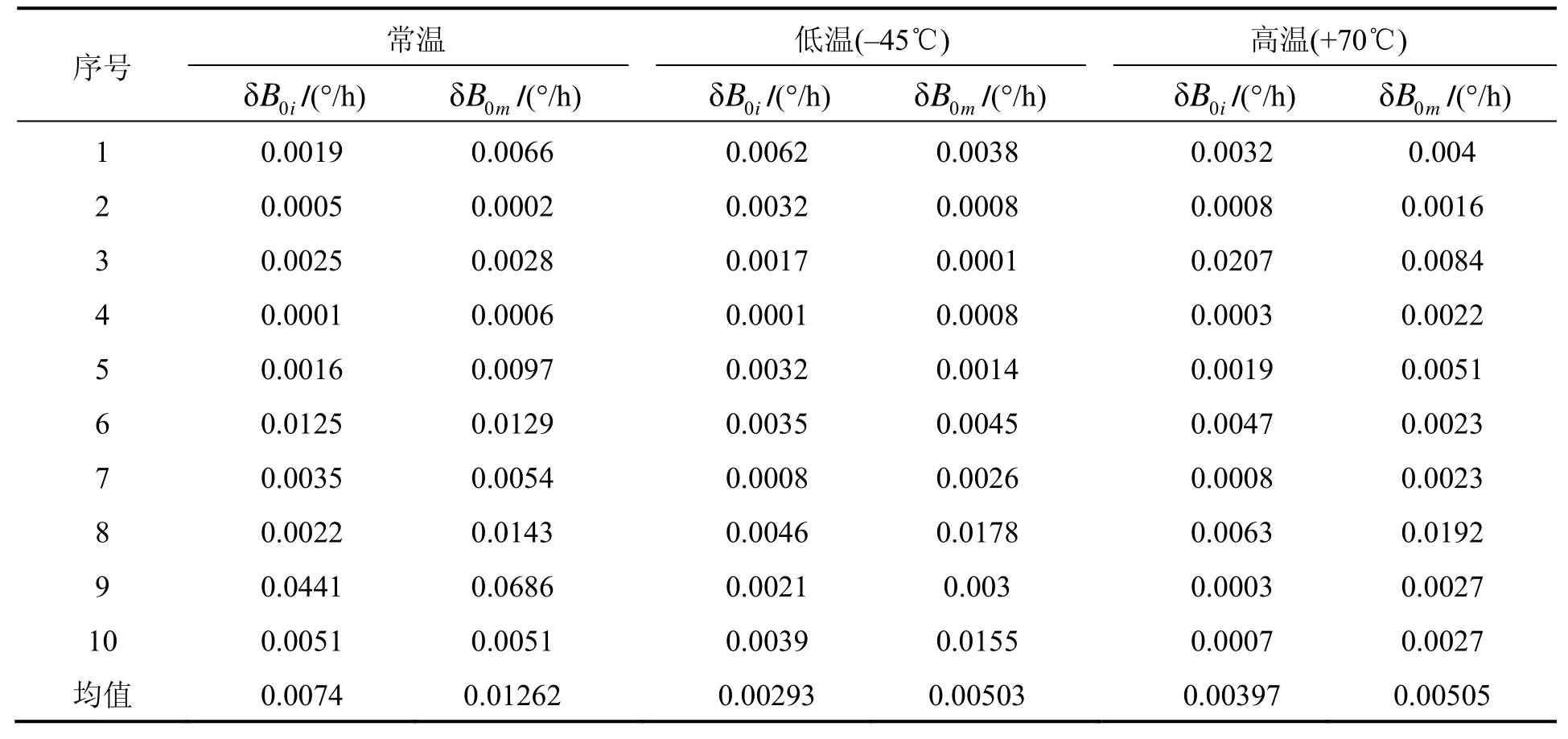
表4 三级表中相邻模零偏差和不平衡电流零偏差Tab. 4 The bias differences of adjacent modes and unbalance discharge in the third grade of gyros
3 理论分析
引入的相邻模零偏差和不平衡电流零偏差两个参数,分别与谐振腔参数和陀螺锁区相关。为了突出影响因素,研究试验中,保证陀螺谐振腔处于温度平衡状态,且控制参量不变,变化因素仅有工作模式的变化和放电电流的变化。增加或者减小一个工作模式,即使谐振腔腔体稳定,而对应的振荡模式将变成q0+1(或者q0-1),谐振腔的振荡光程发生了变化,并且相邻模式发生了变化。相邻模式的振荡光束的轴线位置不同,相邻模式的光束在光阑中的位置、在反射镜上的位置等不同。根据1.3中的试验研究,这项的影响对于部分陀螺而言也是小一个数量级的,但对于高精度陀螺而言,这个误差也是不能容忍的。
3.1 谐振腔参数误差理论
根据引进的参数,相邻模式零偏差与放电电流差零偏差都与谐振腔的放电通道相关。谐振腔放电通道参数包括放电增益毛细孔的长度、放电毛细孔的直径、放电毛细孔与谐振腔光轴之间的相对位置等,而这些参数的误差源贯穿于激光陀螺过程中的加工、计量和调试阶段。控制这项误差[12]主要源于增益介质流动对激光陀螺性能的影响。
由增益介质流动引起的陀螺误差与腔参数的关系,可得到增益介质流动引起的陀螺零偏B0L(单位为 Hz):

式中:li、Ii以及ai分别为第i个放电通道长度、放电电流及放电通道半径。放电毛细孔径与增益介质流速分布函数为

式中:iα为在ai半径放电管中激光光束轴的位置,且

式中:α0为光轴相对于毛细孔轴的距离;z为毛细孔轴向上的位置(坐标);l′是光轴与孔轴的最近距离。
对于已完成装配的激光陀螺而言,谐振腔孔系参数已完全确定,而光束与增益场的关系,则会在电流变化和谐振腔稳频系统作动时发生变化。为了简化,设谐振腔毛细孔径和放电长度相等,即li=ai,则式(4)可简化为

对于相邻模零偏差参数测量过程,放电电流相同,上式可进一步简化为

此时,陀螺稳定条件下由谐振腔变化引起的零偏差为
式中:αj1、αj2(j=1,2)分别为陀螺工作在模式1和相邻模式2上光束相对于放电毛细孔1和放电毛细孔2的位置。如果陀螺部件加工和装调精度都很高,同一波长腔长改变,对应振荡光束位置变化很小,由式(9)可知,此时谐振腔变化导致的零偏变化很小。
根据式(7),在模式位置确定情况下,改变放电电流对称性,假定对称性改变后则可得到:

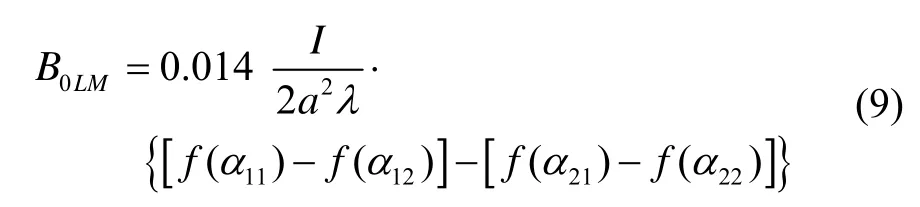
根据式(8)和式(10),可得到放电对称性变化引起的不平衡电流零偏差:

从式(11)可以看出,不平衡电流零偏差与激光陀螺两个放电孔径中光束的位置误差以及放电电流差成正比关系。换言之,对于同一设计和流程的陀螺而言,几何参数和谐振腔参数的差异,可以表征陀螺零偏差值大小。前面的试验已验证,该参数越小,对应的陀螺误差也较小,即陀螺精度相对较高。
3.2 锁区参数误差理论
研究表明,相邻模式陀螺的背向散射矢量和不同,对于由散射引起的陀螺锁区,相邻模式零偏差具有重要的指导意义。根据抖动陀螺基本理论,可得到每次穿越锁区过程中产生的相位误差:

式中:ΩL是静态闭锁阈值,Sk是陀螺比例因子,χ是由顺逆时针光束背向散射耦合所引入的相位,ΩD是抖动角速率峰值,ωd是抖动角频率,ψ0是零时刻(抖动反向时刻)顺逆时针光束相位差。
从式(12)可看出,每次穿越锁区时产生的相位误差Δψe是抖动反向时刻顺逆时针光束相位差ψ0的正弦函数。同时也可得到为使过锁相位误差Δψe最小化,应使闭锁阈值ΩL最小化以及使抖动频率和抖动速率峰值的乘积 ωdΩD最大化。
在给定采样时间Ts内,采用偏频加噪使得0ψ具有确定的随机性,使得,但是,有可能存在一定的残差,对于确定的加噪,0ψ不能实现在给定采样时间中的均值为零,这样,对于一个给定的抖动偏频控制系统而言,假设在采样时间为Ts和在Ts内0ψ的分布不变,则可得到:

结合式(12),可得:
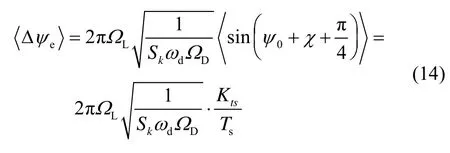
从式(14)可看出,在控制系统不变及采样时间不变的情况下,陀螺的锁区直接确定了陀螺输出的残差,相当于陀螺零偏。因此有:

假设偏频加噪残差系数可表示为

式中:K0与时间无关的残差;ΔK( t)与时间有关的残差。由式(12)和式(13)可得到:

式中:B00L与陀螺工作时间无关的锁区残差,即陀螺的零偏;B0sL与陀螺工作时间有关的锁区残差,即陀螺的零偏随时间的变化,也就是与陀螺零偏稳定性相关。
因此,在陀螺控制参量一定的条件下,锁区不但引起陀螺的零偏稳定性误差(这在一般研究和论述中都已进行了很多研究,在此不做进一步说明),也将引起陀螺零偏值,且该值与陀螺锁区成正比。同时,由于相邻模的锁区差异最大,因此相邻模零偏差参数测试结果可以反映陀螺锁区性能,以此作为陀螺精度等级的判据之一。
4 结 论
在陀螺测试和性能评估系统中引入相邻模陀螺零偏差及不平衡电流零偏差两个参量,通过对不同等级表陀螺两个对应参量的对比研究,发现陀螺性能与两个参量具有确定的关系,陀螺性能越好,对应两个参量的数值也会小,通过控制这两个参量可以有效提高陀螺使用精度和成品率。同时,文中还利用谐振腔零偏误差理论和激光陀螺偏频加噪理论,分析了两个参数变化的根源,分别为谐振腔参数和锁区。相邻模零偏差和不平衡电流零偏差两个参数的引入也为降低陀螺快速过锁锁区,综合评价谐振腔装配及加工参数寻求到了一种有效的技术途径,对进一步提高抖动激光陀螺精度具有工程实用价值。
(References):
[1]刘智平, 韩宗虎. 国外光学捷联惯导系统的技术现状和捷联惯导发展趋势[J]. 航天控制, 2012, 30(5): 94-99.Liu Zhiping, Han Zonghu. The technical situation and development tendency of foreign optical strapdown inertial navigation system[J]. Aerospace Control, 2012, 30(5):94-99.
[2]Aronowitz F. Fundamentals of the ring laser gyro. optical gyros and their application[R]. RTO-AG-339, 1999.
[3]Chow W W, Banacloche J G, Pedrott I L M, et al. The ring laser gyro[J]. Reviews of Modern Physics, 1985, 57:61-104.
[4]Volk C H, Gillespie S C, et al. Multioscillator ring laser gyroscopes and their applications[EB/OL]. (2005-07-04)http://www.Es.Northropgrumman.com/bydivision/navigat ionsystems/whitepapers/assets/Multioscillator-Ring-Laser-Gyr.pdf.
[5]韩宗虎, 胡晓东. 激光陀螺反射镜散射检测方法[J]. 中国惯性技术学报, 2015, 23(4): 540-543.Han Zong-hu, Hu Xiao-dong. Method of mirror scattering test for laser gyro[J]. Journal of Chinese Inertial Technology, 2015, 23(4): 540-543.
[6]Rodloff R. A laser gyro with optimized resonator geometry[J]. IEEE Journal of Quantum Electronics, 1987, QE-23(4): 438-445.
[7]韩宗虎, 陈林峰, 陈勇, 等. 激光陀螺锁区特性的研究[J]. 光子学报, 2006, 35(6): 807-810.Han Zong-hu, Chen Lin-feng, Chen Yong, et al. The study of laser gyro lock-in characteristic[J]. Acta Photonica Sinica, 2006, 35(6): 807-810.
[8]Klimkovich B V. Algorithmic compensation of attitude error in a dithered ring laser gyro[J]. Gyroscopy and Navigation, 2012, 3(2): 120-123.
[9]杨慧哲. 温度误差对激光陀螺零偏温度补偿精度的影响分析[J]. 光学与光电技术, 2014, 12(2): 98-100.Yang Hui-zhe. Effect of temperature error on the temperature compensation accuracy of RLG’s bias[J]. Optics &Optoelectronic Technology, 2014, 12(2): 98-100.
[10]梁可, 韩宗虎, 陈林峰, 等. 零闭锁激光陀螺磁不敏感点与放电电流关系的实验研究[J]. 光学学报, 2014,34(3): 0314005.Liang Ke, Han Zonghu, Chen Linfeng et al. Experimental investigations on relation of magnetic insensitive point and discharge current in zero-lock laser gyro[J]. Acta Opitca Sinica, 2014, 34(3): 0314005.
[11]Zhang Tong, Zhang Jun, Hu Junjie. Dynamic model and simulation of aseismatic system about laser gyro strapdown inertial measure assembly based on MSTMM[J].Journal of Systems Engineering and Electronics, 2012,23(5): 741-751.
[12]汪之国, 龙兴武, 王飞, 等. 激光陀螺本征模偏振态与磁灵敏度特性的理论研究[J]. 物理学报, 2013, 62(5):054205.Wang Zhi-guo, Long Xing-wu, Wang Fei, et al. Theoretical analysis of polarization eigenstate and magnetic sensitivity in a ring laser gyro[J]. Acta Physica Sinica, 2013, 62(5):054205.
Performance analysis on bias difference of adjacent modes and unbalance discharge current of laser gyro
HAN Zong-hu, LI Jun, WANG Ke, HU Xiao-dong, ZHAO Xiao-ning
(Flight Automatic Control Research Institute, Xi’an 710065, China)
In studying the laser gyro engineering technology, one of the main contents is to improve the accuracy of laser gyro and the rate of finished products by controlling the parameters. The bias difference of adjacent modes and the bias difference of unbalance discharge current were introduced into the performance evaluation system of laser gyro. According to the study on some different grades of laser gyro, the relationship between the two parameters and the performance of laser gyro were determined. By optimizing these two parameters, the accuracy of laser gyro and the rate of finished products can be effectively improved. Besides, the variation origins of the two parameters were studied, which are the variations of the resonant cavity and the lock-in, respectively. The two parameters provide an effective technical method to improve the precision of the laser gyro, and have practical value for further improving the precision of the mechanically dithered laser gyro.
laser gyroscope; bias; bias difference; bias difference of adjacent modes; unbalance discharge current
U661.1
A
1005-6734(2016)05-0649-06
10.13695/j.cnki.12-1222/o3.2016.05.016
2016-06-26;
2016-09-23
国家十二五预研资助项目(51309010201)
韩宗虎(1961—),男,研究员,现主要从事激光技术、光学传感器研究。E-mail: hanzonghu@sina.com
