基于自适应PID的永磁同步电机电流控制
2016-12-20李玲瑞许鸣珠高旭东
李玲瑞,许鸣珠,高旭东
(石家庄铁道大学,石家庄 050043)
基于自适应PID的永磁同步电机电流控制
李玲瑞,许鸣珠,高旭东
(石家庄铁道大学,石家庄 050043)
论文提出了基于自适应PID的永磁同步电机电流环控制策略,并将该算法数字化,应用于以DSP TMS320F2812为核心的永磁同步电机数字控制平台,实现了对永磁同步电机电流环的稳定控制。该算法采用带遗忘因子的最小二乘法对PID不确定参数进行估计。实验结果表明,所提方法控制精度高、鲁棒性强,方便工程应用,实用价值较高。
永磁同步电机;自适应PID;带遗忘因子的最小二乘法;电流控制
0 引 言
永磁同步电机(以下简称PMSM)控制一般采用双环结构,内环为电流环,外环为速度环,传统PID调节是最常用的控制方法[1]。但是,传统PID参数调节不够方便,且对于大时滞、时变、非线性或随机干扰严重的系统往往不能得到满意的控制效果[2]。为了得到良好的动态性能和静态性能,学者们提出了许多新的控制方法。姜伟等[3]采用模糊PI控制来调节PMSM的速度,模糊控制无需知道被控系统的数学模型,依据以往的控制经验设计控制器,在线对系统参数进行模糊调整。在文献中,邵伍周等[4]将单神经元PID调节器和RBF神经网络结合,实现了参数的在线辨识和转速的在线控制,模糊算法和神经网络对模型参数摄动及负载扰动的鲁棒性都较强。为了解决传统PI无法实现解耦而电压前馈解耦控制策略对参数敏感的问题,文献[5]提出了基于内模的滑模电流解耦控制策略,利用内模控制策略控制电机解耦模型,保证系统动态响应的速度。但是上述控制方法也都存在一定的不足,例如:模糊控制需要前期的控制经验,神经网络的离线训练需要大量的实验样本数据,而内模控制需了解被控对象的精确模型,实现过程非常复杂,实际应用中对硬件要求高,适用面较窄。
为了方便硬件控制的实现,本文提出一种基于自适应PID的控制策略,将自适应控制与经典PID算法相结合,利用带遗忘因子的最小二乘法在运行过程中实时估计比例系数、积分系数和微分系数,对应用面最广的经典PID控制器进行在线优化。本文算法使用的自适应PID控制器参数调整简单,不需要被控对象的精确模型,计算量小,调节速度快,易于在硬件中实现。
1 电流环自适应PID控制器设计
将自适应算法与经典PID控制算法相结合,推导出自适应PID控制算法,使系统在闭环运行状态下,在线修正算法参数[6-7]。
控制对象的二阶惯性加滞后的传递函数G(s)和PID控制器的传递函数D(s):
(1)
(2)

(3)

(4)
(5)
本文设计的自适应PID控制器算法基本步骤如下:
(2) 读取新的观测数据y(t)和设定值yr(t),组成回归向量φT(t-1)=[y(t-1) y(t-2) u(t-L)];
(5)将参数值赋予自适应PID模块;
(6)返回步骤(2),重新开始计算。
基于自适应PID参数自整定控制的原理如图1所示,属于隐式自矫正控制器,通过对系统过程中的转速偏差e(k)、控制输入u(k)以及实际输出ym(k)进行不断的检测,并将其作为参数利用最小二乘法进行估值以获得实时的PID参数。
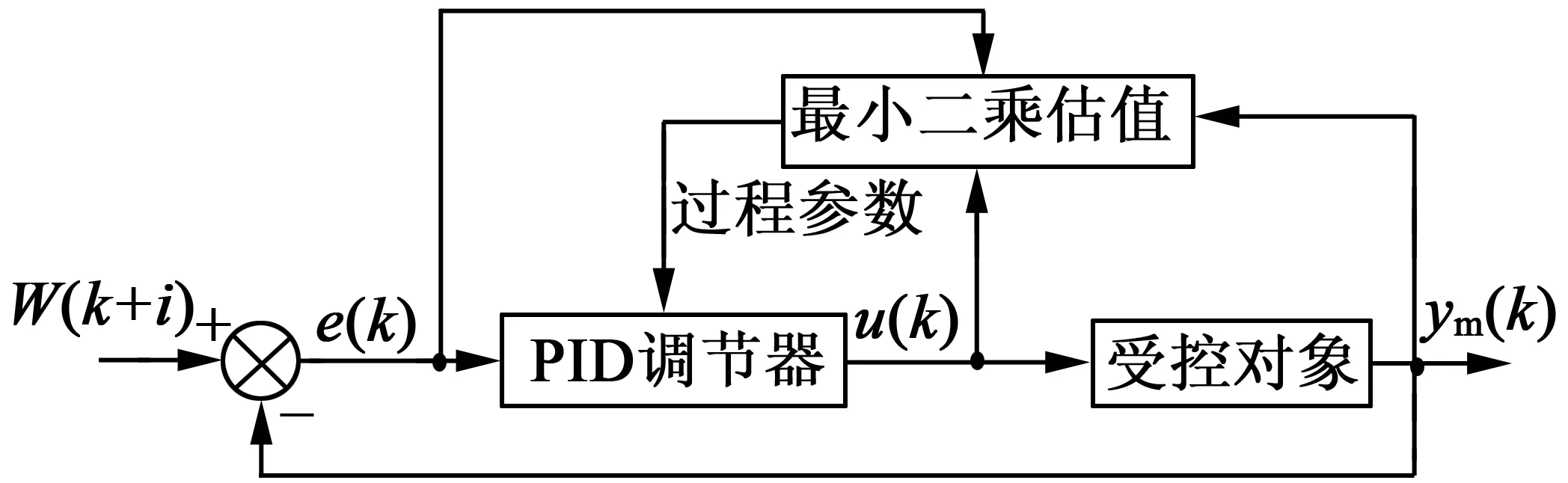
图1 自适应PID控制原理
2 实验系统设计
2.1 硬件设计
为了将自适应PID控制器数字化应用,设计了以TMS320F2812为核心的永磁同步电机驱动控制器硬件,包括控制板模块、功率板模块、显示调速模块,控制器硬件结构如图2所示。
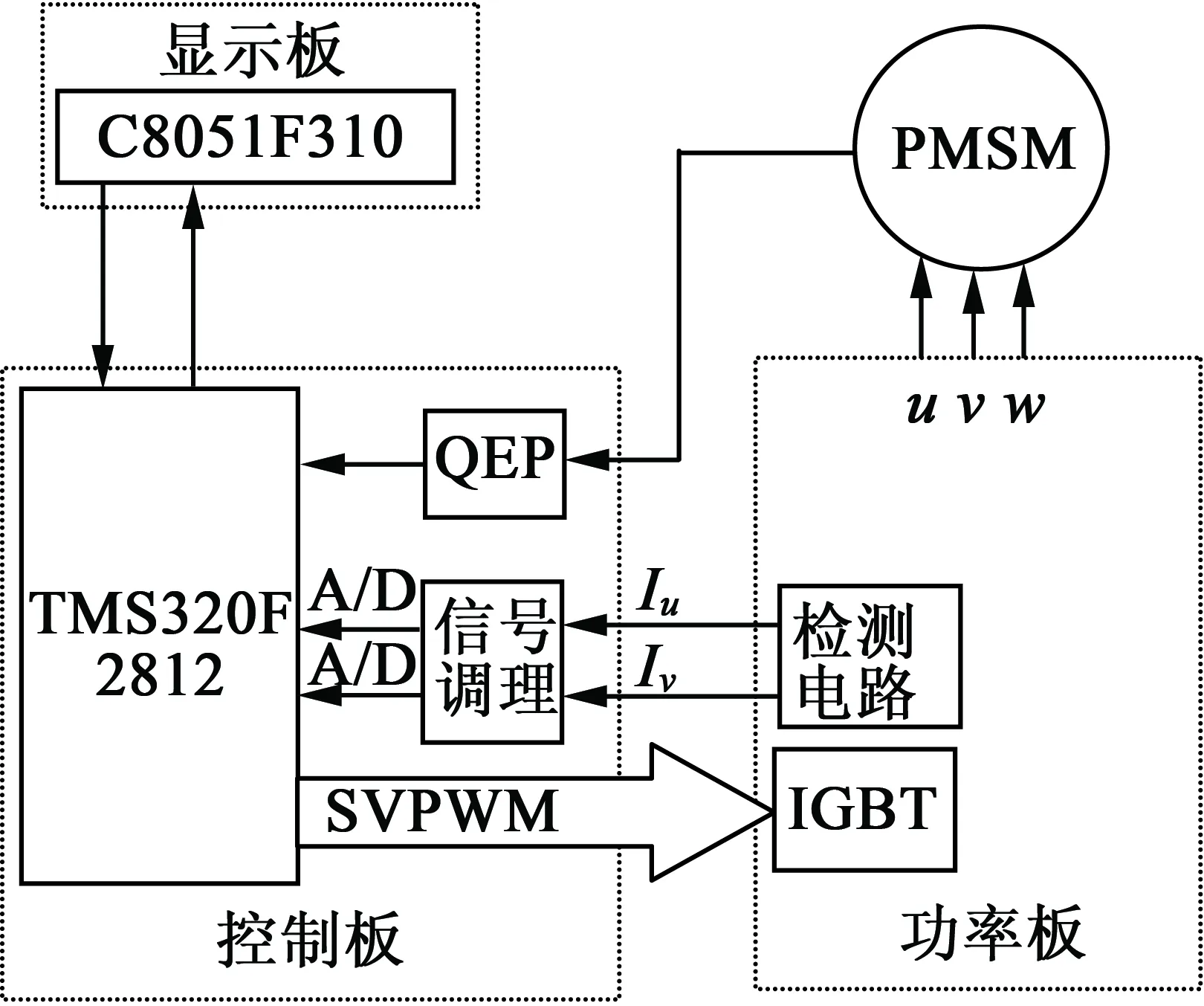
图2 控制器硬件结构
硬件系统通过显示板中设定输出转速,输送给DSP,作为系统的给定速度[8];控制模块产生的SVPWM信号经过线性驱动后输出给驱动模块,再经过光电隔离进入大功率驱动芯片后将信号传给IGBT桥型电路,输出逆变信号给PMSM;检测电路由霍尔电流传感器检测电流输出波形,信号经过滤波整形调理处理后反馈给DSP芯片的A/D转换模块进行运算;正交编码脉冲电路(QEP模块)检测PMSM的编码器信号作为速度反馈,经信号调理后传送给DSP,实现电机控制。
2.2 软件设计
本实验的开发环境为CCS5.5,开发环境为C语言,采用模块化编程。程序模块包括主程序、初始化模块、斜坡控制模块、坐标变换模块、PWM生成模块、PID模块等。中断主要有定时器1下溢中断服务程序、编码器计数中断服务程序。定时器1下溢中断服务程序为整个程序的核心部分,也是实现电机平稳运行的关键。在定时器1下溢中断中首先读取Iu,Iv的AD转换结果,进行坐标变换,对电流环进行控制;通过QEP模块检测电机角度,对速度环进行控制,实验流程图如图3所示。
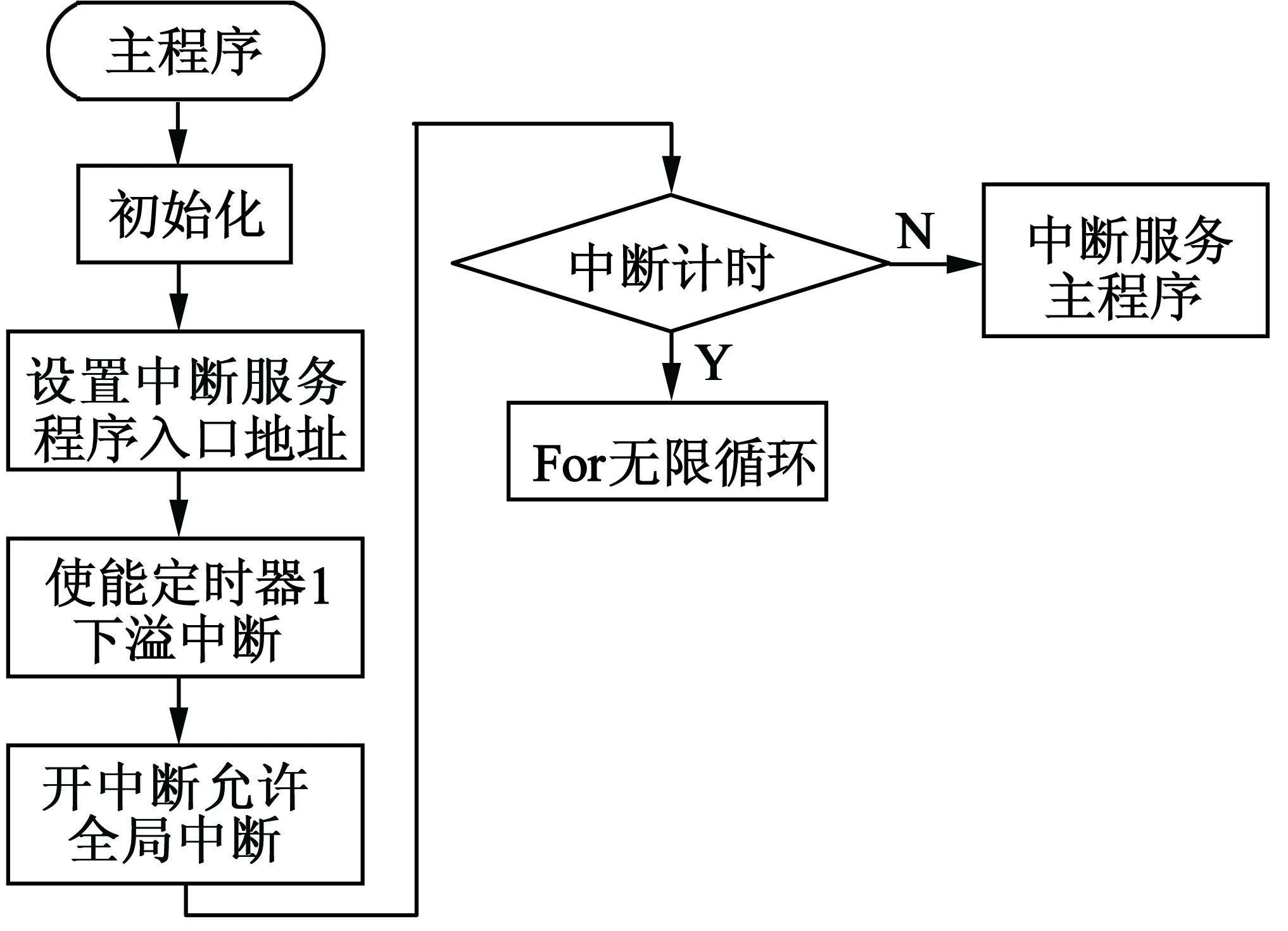
图3 实验流程图
根据本文所提算法和相关原理,实验采用的PMSM参数如下:Pn=0.2kW,In=7.5A,Tn=0.637N·m,Un=36V, Nn=3 600r/min,p=4。实验硬件核心是TI公司研发的32位定点高速数字处理器TMS320F2812,最高工作频率为150MHz,系统的控制周期为50μs。PMSM的控制驱动方式为id=0的电流矢量控制,控制器系统结构如图4所示。
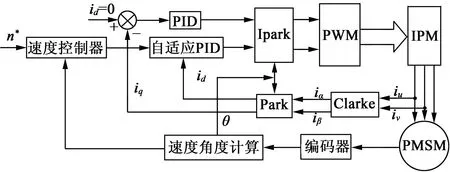
图4 永磁同步电机程序结构控制方式
3 实验结果及分析
永磁同步电机调速传动系统多采用矢量控制技术,矢量控制实质上就是对电动机定子电流矢量相位和幅值控制。当磁体的励磁磁链和直交轴电感确定后,电动机的转矩便于通过id,iq来控制。在本文实验中采用id=0的矢量控制方法,通过如下三种程序结构的控制方式进行对比研究:
(1)d,q轴中均放入自适应PID模块

图5 d,q轴均自适应PID控制的速度响应曲线
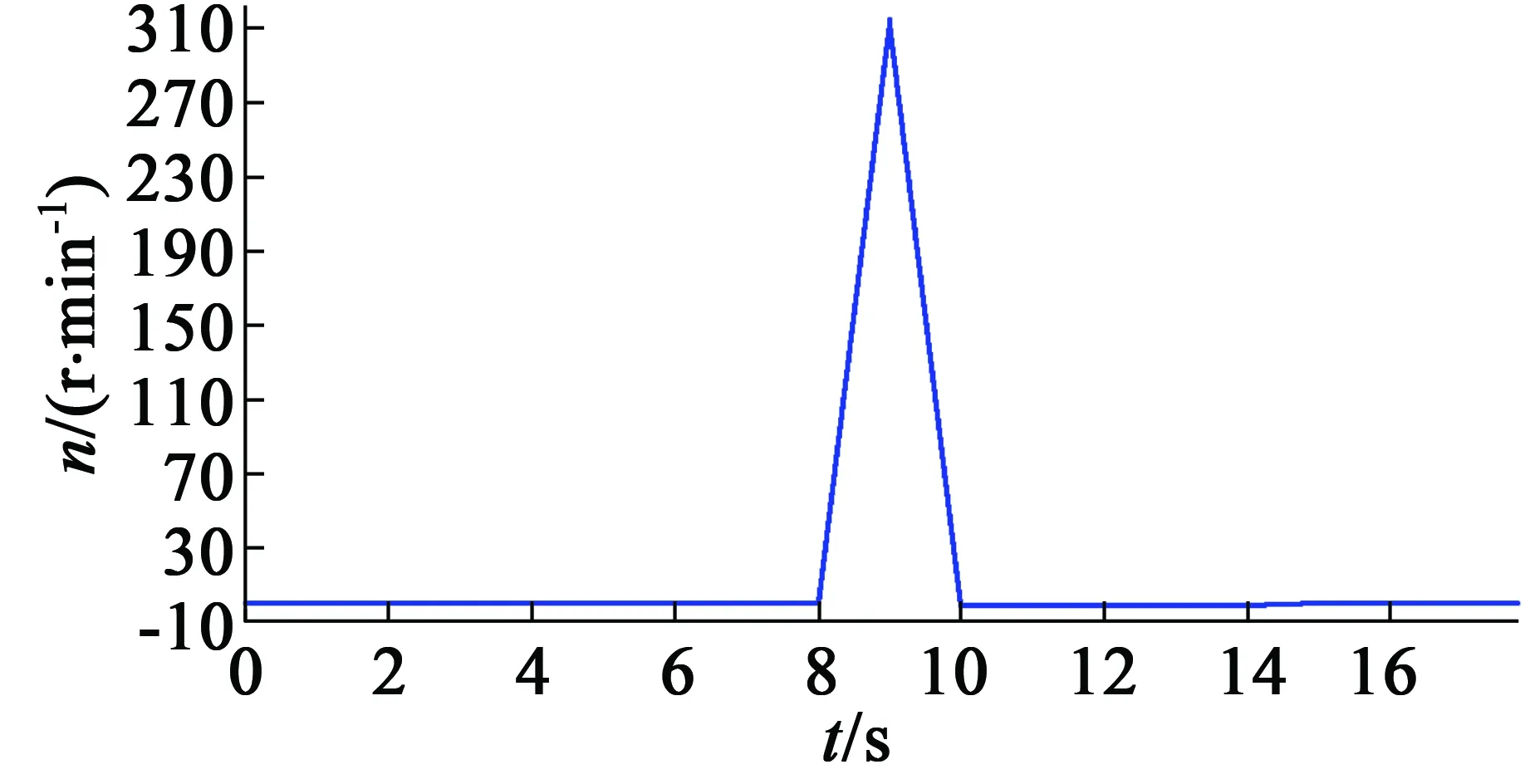
图6 电机堵转现象
(2)d轴为经典PID控制,q轴为自适应PID控制
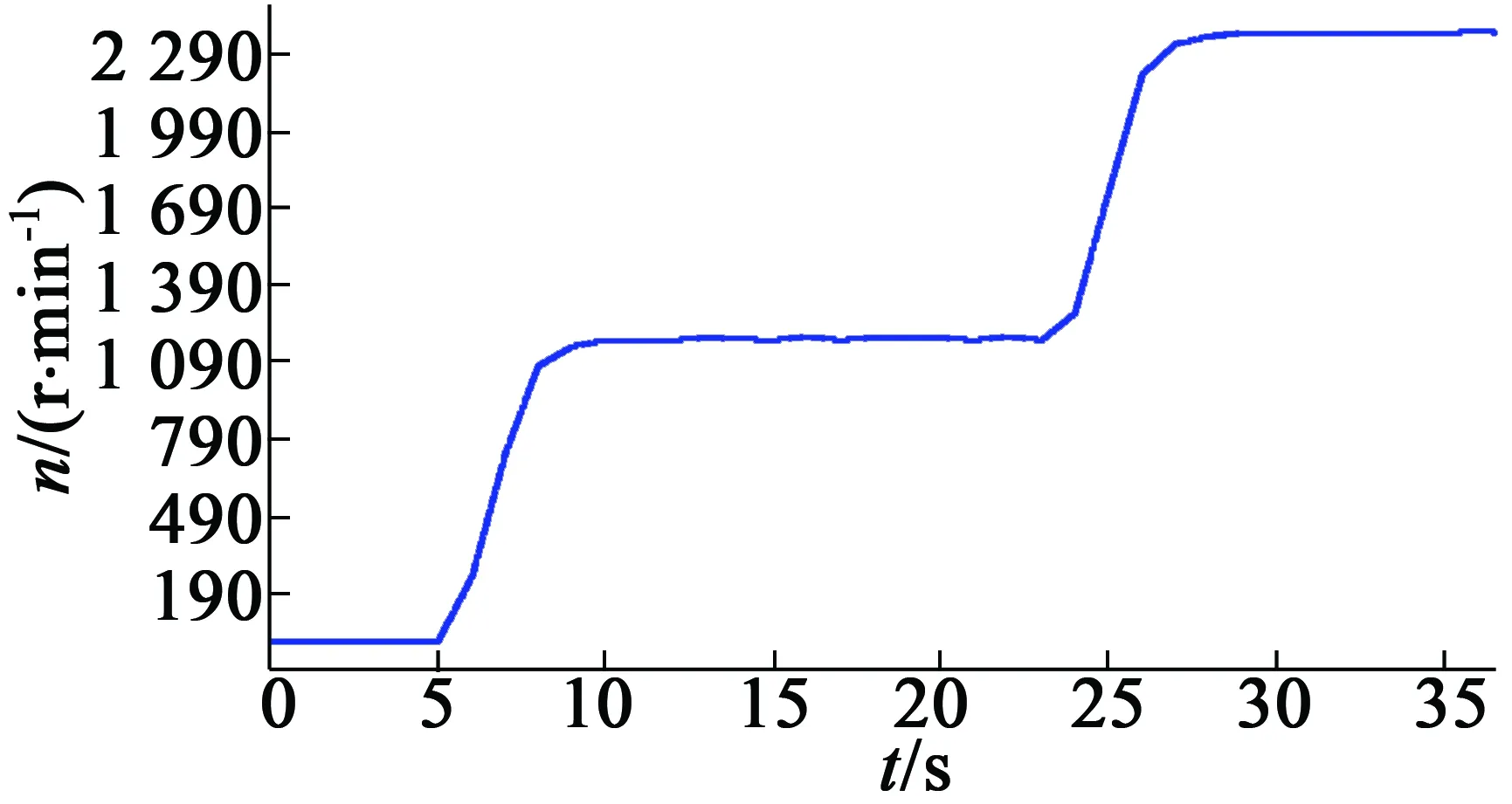
图7 自适应PID加经典PID控制的速度响应曲线
(3)d,q两轴中均用经典PID控制
通过在线调节,设定d,q轴的PID函数模型参数:Kp_id=0.72,Kp_iq=1, Ti_id=0.003 17,Ti_iq=0.003 17,Td_id=0,Td_iq=0。经典PID通过在线调节PID的系数来获得对永磁同步电机的平稳控制。图8为经典PID控制的速度响应曲线图,占空比为 0.4。
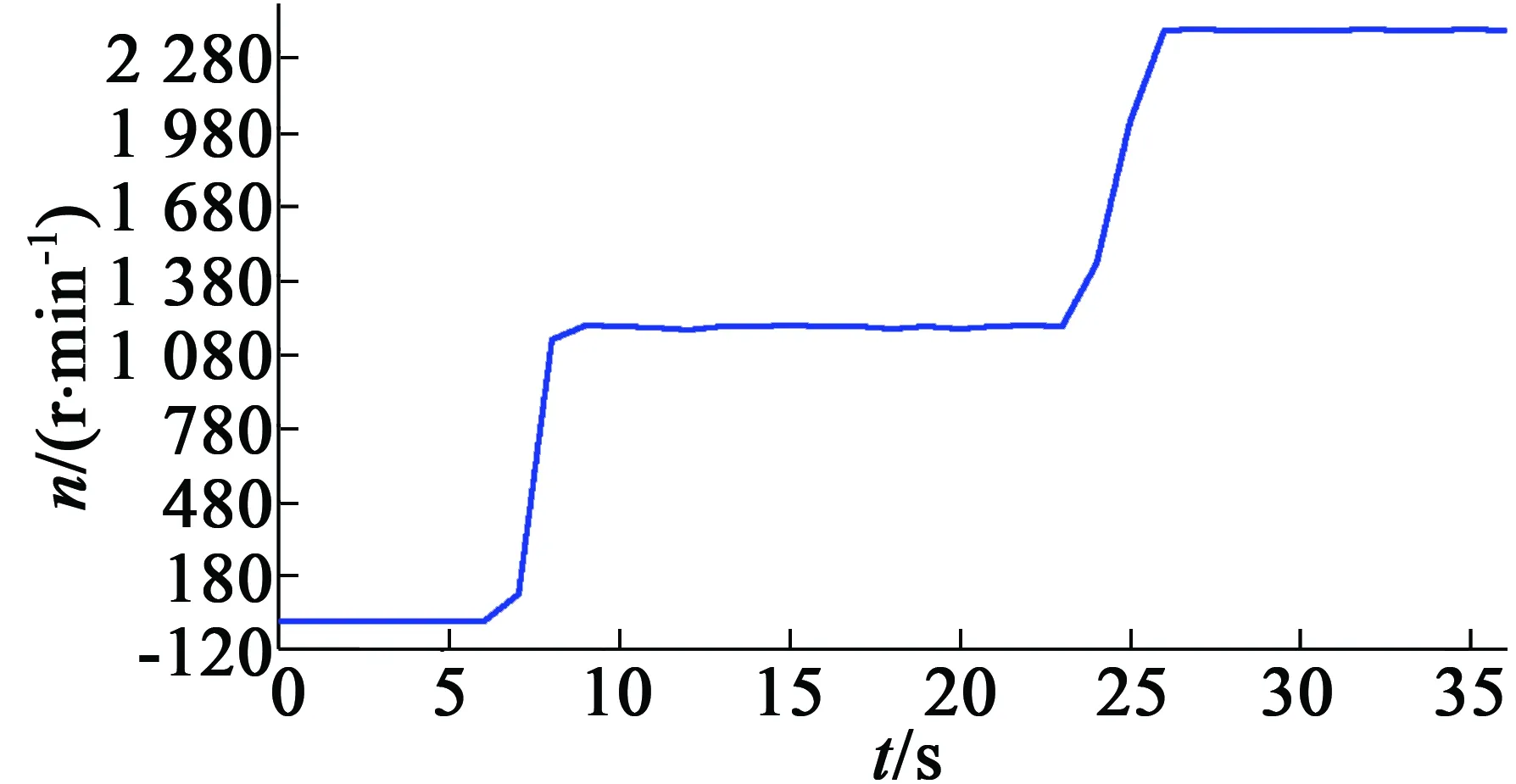
图8 经典PID控制的速度响应曲线
对比图5和图7,可以发现d,q轴均采用自适应PID控制与仅q轴采用自适应PID控制的速度响应曲线图相似,对电机的控制效果相同,但图7所用的单q轴采用自适应PID控制的方法更加简单,且没有堵转报警现象。对比图7和图8,可以发现自适应控制的PMSM的速度响应曲线比PID控制的曲线响应更加平稳,速度波动小,尤其在高速时速度波动几乎为0,且速度突变时速度过渡更加平缓,自适应性强,能够较好地延长电机的使用寿命。
4 结 语
本文针对在进行经典PID应用时含有不确定因素的情况,对其参数采用带遗忘因子的最小二乘法进行参数的自适应估计。通过硬件实验对比,可以证明该方案可以在不确定PID参数,电机模型未知甚至参数发生变化的情况下,根据具体工况进行参数估计,得到稳定的控制结果,自适应性强,具有很高的工程应用价值。
[1] BOSE B K.Power electronics and variable frequency drives:technology and applications[M].Wiley-IEEE Press,1997.
[2] 梁军,符雪桐,吕勇哉.自适应PID控制——I.基本原理与算法[J].浙江大学学报,1994,28(5):523-528.
[3] 姜伟,孙军,裘信国.基于模糊PI控制的PMSM驱动控制系统[J].轻工机械,2015,33(5):69-72.
[4] 绍伍周,唐忠,蔡智慧,等.基于RBF神经网络在线辨识的永磁同步电机单神经元PID矢量控制[J].电力科学与技术学报,2007,22(2):48-52.
[5] 周华伟,温旭辉,赵峰,等.基于内模的永磁同步电机滑模电流解耦控制[J].中国电机工程学报,2012,32(15):91-99.
[6] 赵建华,沈勇良.一种自适应PID控制算法[J].自动化学报,2001,27(3):417-420.
[7] 任勇.一种抗强干扰自适应PID控制算法[D].哈尔滨:黑龙江大学,2012.
[8] 任志斌.电动机的DSP控制技术与实践[M].北京:中国电力出版社,2012.
Current Control of Permanent Magnet Synchronous Motor Based on Adaptive PID
LI Ling-rui, XU Ming-zhu,GAO Xu-dong
(Shijiazhuang Railway University,Shijiazhuang 050043,China)
In this paper, the current loop control strategy of permanent magnet synchronous motor based on adaptive PID is proposed, and realizes the digital of the algorithm, and the algorithm is applied to the digital control platform of permanent magnet synchronous motor based on TMS320F2812 DSP. It realizes the stable control of permanent magnet synchronous motor current loop. The algorithm adopts the least square method with forgetting factor for PID parameter uncertainty estimation. The results show that the proposed method has higher control precision and strong robustness as well as high engineering application value and high practical value in the field of motor control.
permanent magnet synchronous motor; adaptive PID; the least square method with forgetting factor; current control
2016-01-12
国家自然科学基金面上项目(11372198);河北省教育厅科学技术重点项目(ZD20131089)
TM351;TM341
A
1004-7018(2016)10-0058-03
李玲瑞(1990-),女,硕士研究生,研究方向为智能检测技术与控制系统。