智能型多功能茶园作业机遥控装置的研究
2016-12-19盐城工业职业技术学院罗文华
盐城工业职业技术学院 罗文华
智能型多功能茶园作业机遥控装置的研究
盐城工业职业技术学院 罗文华
近年来,茶园专用农业机械发展迅速,茶叶生产过程的多数环节,如耕地、施肥、深松等已经实现了机械化作业,这些先进农业机械的投入使用,为中国的茶叶生产提供了坚实的技术支持,很大程度上减轻了茶农的劳动强度,对茶叶生产的提质降耗,增产增收效果显著。但是在特殊地理环境下的茶叶生产,像山坡地茶树中后期的中耕、深松、施肥、植保、修剪、采茶等作业,由于行间距及坡度的影响,能够进入茶行作业的机械很少,甚至根本无法实现机械化作业。现今电子信息技术特别是遥控技术的发展,给农业机械发展带来了新的机遇,将遥控技术引入茶园管理机可以实现茶园管理机遥控作业,由于操作者可以远离作业现场,遥控操作对提高作业的安全性、舒适性和生产效率以及减少操作者劳动强度都有着极其重要的作用。
1 遥控发射与遥控接收系统设计
茶园作业机械通过发动机将动力直接传输到调速行走系统,利用遥控系统控制传动系统调节驱动履带,实现前进、后退、加速、减速、转弯、停止等功能,从而使履带机实现自动行走。各作业功能是通过发射装置遥控手柄按钮向接收器发送命令,实现中耕、深松、施肥、植保、侧边修剪等操作作业工序。
1.1 遥控转向系统
整个遥控转向系统由遥控部分和车内计算机控制部分组成,遥控部分实际是2台计算机之间的通讯,车内计算机控制指的是计算机接收操作者发出的指令,并依车速等外界条件,通过控制直流电机的输入电流,实现对方向盘的控制,输入电流大小反应在方向盘转动的角度上,而输入电流的脉冲频率,则反应在方向盘转动的快慢上。图1所示:

图1
1.2 遥控变速器
操作人员通过遥控器手柄模拟加速踏板,手柄信号通过A/D转换后经计算机编码,再进行载波调制以及信号放大,然后通过其自身的发射天线以无线电波的形式进行发射;车内计算机通过传感器采集油门位置和发动机转速信号,根据发动机的工作特性,确定发动机的输出转矩和输出功率,或根据遥控指令电控系统可以自动改变变速器的传动比,从而改变车速,充分利用发动机的功率,提高燃油经济性,达到节能的目的。图2所示:
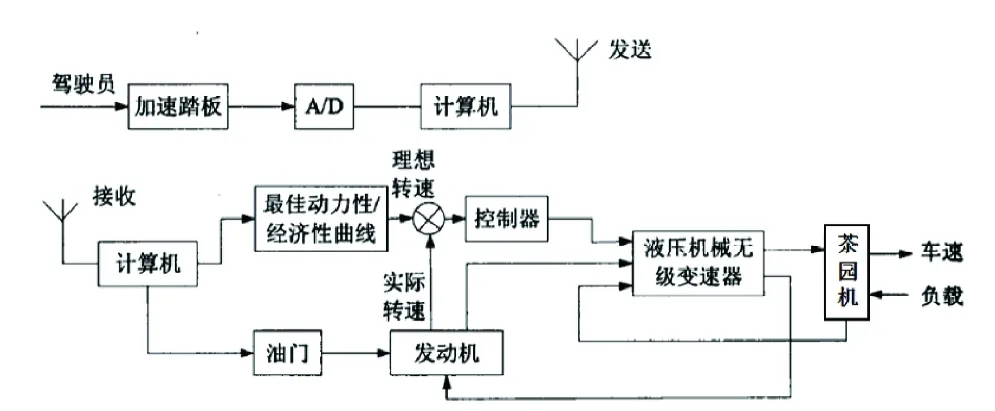
图2
1.3 遥控作业机具
操作人员通过遥控器功能开关,选择作业项目,开关信号经计算机编码,再进行载波调制以及信号放大,然后通过其自身的发射天线以无线电波的形式进行发射;车内计算机接收操作者发出的指令,依据作业要求,通过电磁阀控制液压系统实现对作业机具动力驱动控制,实现修剪、植保、中耕、深松和施肥等功能操作。图3所示:
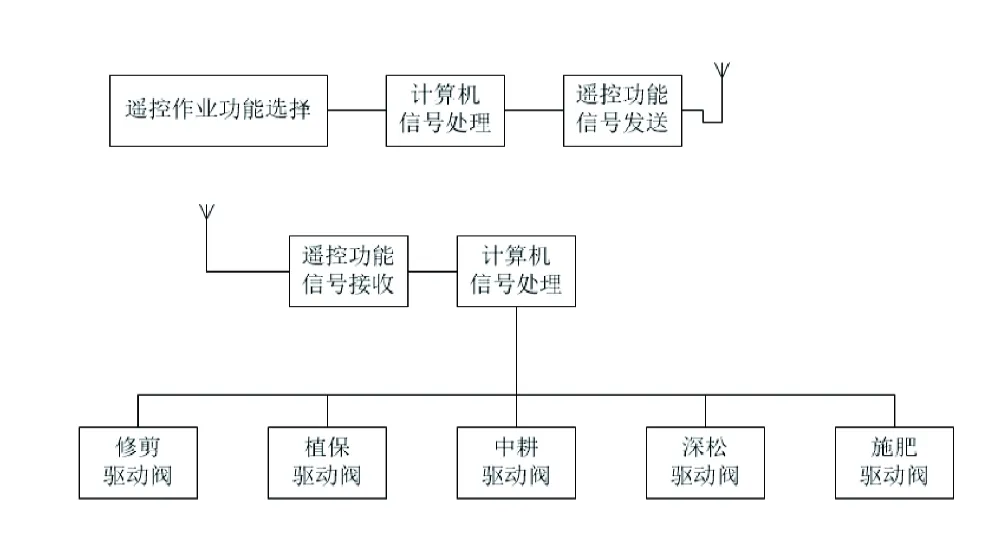
图3
2 控制流程
在遥控茶园管理机行走系统的遥控操作中,采用整机开环控制,局部计算机闭环控制,将各执行机构的信息反馈到局部控制计算机中,以选择最优的控制方式,其遥控控制流程如图4所示:
无线遥控茶园管理机是将无线遥控技术与茶园管理机、液压及自动控制技术相结合的产物,组成中包括用于无线遥控指令发射的遥控发射机、用于无线遥控指令接收的遥控接收机。无线遥控发射机对遥控系统的控制指令信号进行编码、载波调制以及信号放大,然后通过其自身的发射天线以无线电波的形式进行发射;无线遥控接收机将接收到的无线电信号放大、解调、译码、驱动后送给输出电路。茶园管理机上的各种电一机械(液压)转换元件在输出电路的控制下分别驱动相应的执行元件及其传动机构,最终完成各功能部件的预定动作。采用一定范围内的远程遥控驾驶技术,使作业机具在陡坡茶园、株枝较矮的果园以及设施农业中通过性强、安全性高,从而可形成多功能茶园作业机械智能化控制新模式。
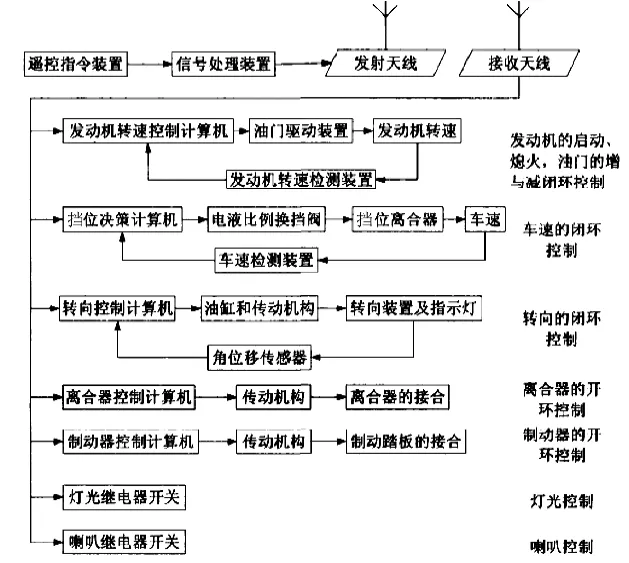
图4
2016-9-30)
盐城市农业科技创新专项引导资金项目(YK2015029)