美国空间机器人技术路线图(上)
2016-12-19美国国家科学基金会编译卢川
□文/美国国家科学基金会 □编译/卢川
美国空间机器人技术路线图(上)
□文/美国国家科学基金会 □编译/卢川
人类对于外太空始终充满好奇。从古代的嫦娥奔月到现在的天宫二号、神舟十一号。据报道,我国将于2020年前将有史以来最贵的太空机器人送往太空。而在该领域,美国无疑是先行者。美国国家科学基金会颁布了一个为期十五年的机器人领域技术路线图,其中空间机器人作为单独的一章论述。
古往今来,在与生俱来的好奇心驱使下,人们对未知的探索欲从没有停止过。历史证明,这种探索欲不仅有助于开拓新的领域,而且能促进经济的增长,从而进一步增强国家的综合实力。正是对于新事物、新材料的探索,极大地促进了一个国家的经济发展。从1958年开始,美国国家航空航天局(NASA)就担负着美国探索地球之外领域的重任,并取得了一系列重大突破,用实践证实了上述观点的正确性。
我们对太阳系(以及更远的星系)的认识,很大程度上归功于机器人探测器、飞行器、登陆车和漫游机器人。这些机器人探测器代表着人类的智慧,穿越无穷的深空去探索、观测和访问遥远的宇宙。这些机器人都装备有导航、探测传感器、用于进行控制和数据处理的机载航电设备、驱动及定位设备,它们能够在行星表面轨道上完成重大的科学与工程任务。机器人技术、遥控操作机器人和自动化系统方面的研究,为上述功能提供了必要的技术支持。
空间机器人的战略重要性与意义
放眼未来,NASA将会把机器人、遥控机器人和自动系统的研究作为重要策略。美国于2010年6月28日发布的空间探测方案对此也有着重提及。制定这一方针的目的是“追求人机协同的创造性”,以开发创新性的机器人技术,帮助NASA维持并发展机器人在太阳系探索中的应用,并为开展科学实验以及未来的有人操作任务做准备。这一方案也同样指出了实现自动化技术的快速和持续发展,及其成熟应用于大量任务的需求。这些任务还包括能够极大地加强空间探测能力和操作能力的空间电力高效管理系统等。
在所有NASA任务部门中,机器人和自动化系统早已发挥着重要作用。正在进行的国际空间站人工作业任务中,包含相当重要的成员组工作任务,要求工作人员与仓内外机器人系统协同维护,并对飞船的在线自动控制及任务控制系统进行支持。未来的探测任务将进一步扩展这种人机协同探索的合作关系。尽管空间飞行中的无人科学任务已经相当机器人化,但其依然与地面的科学站以及操作人员有着紧密联系。未来,NASA将会在更广泛的领域使用这种人机协同探索系统。因此,NASA已经为机器人和自动化系统制定了一份专门的路线图,目标是为未来25年NASA下辖的四个任务部门的多项计划中的空间任务提供技术支持。
机器人和自动化技术使NASA受益良多,其中包括:将探索空间延伸到超过载人飞船限制之外的更深远的空间;降低载人飞行带来的巨大成本和风险;提高科研、探索和任务操作的性能表现;增强机器人的任务执行能力;将机器人和自动化变成了生产力倍增器(比如每一个操作员可以控制N个机器人),同时增强机器人着陆和无人飞行器的自动化程度和安全性。
其实,这些技术在NASA之外带来的潜在效益甚至更加远大。包括:将制造业重新带回美国;开发新的电动汽车、更有效的风能发电控制、智能电网和其他绿色能源技术;提高采矿业和农业自动化程度;创造更强大的校正、康复、外科、远程手术和辅助机器人;延伸水下机器人的探索和服务范围;将机器人技术融入教育以促进科学、技术、工程和数学的发展;增强服务领域、应急响应、危险环境操作和排爆机器人的任务执行能力以及扩大自动化海陆空交通运输的使用范围。
以上这些外部的应用与NASA多年来一直致力于将自身的技术创新应用于个人领域的作风完全一致。NASA的技术几乎可以在所有的民用和军用领域找到应用实例,从飞行器到空气质量传感器, 从医疗卫生进步到维护执法和个人安全的新材料等。NASA的衍生技术挽救了无数的生命,创造了大量的工作机会,为企业和消费者节约了超过62亿美元的成本。据估计,直接和间接从NASA共享出的技术,为美国的经济发展贡献率大约为每为空间探测投资1美元将能收回700% 的回报。

卢川 特约撰稿人中国科学院地质与地球物理研究所博士


协同探测空间机器人应用事例
场景1:行星地下(洞穴)探测
行星地下(洞穴)探测已经设想了一个世纪,但一直可望而不可及,因为目前还没有办法到达火星进行地下探测。行星地下(洞穴)探险的动机包括研究行星的起源、地质、生命迹象和人类居住的适宜程度等等。最近,伴随着太阳系中月球、火星及其他行星的天窗的发现,使以往我们无法深入研究某些天体的局面正在改变。天窗是陡峭的圆柱形或圆锥形孔石壁的行星坑。其中一些天窗暴露了重要的地下洞穴入口。这些最近被发现的、完全未被暴露的区域极大激发了人类探索生命迹象、形态和起源的科学夙愿。天体表面的机器人技术和使命已经成功了半个世纪,但这些技术在岩石、未风化层及洞穴中穿行方面的能力尚不足。机器人在洞穴中光线、直线式的视距通信无法胜任,需要新的接口和自主行为能力。探索这些洞穴和隧道需要新的机器人技术。
公里级别的着陆精度能够满足许多任务需要,但如果实现米级精度的话,可以引导着陆器平飞, 并通过特写、鸟瞰视角查看天窗孔。规划机器人目标附近的着陆点后,机器人着陆,断开连接,并继续探索地面和洞穴。漫游者可以接近、查看、环航和研究天窗的平台、边缘和部分可视安全防区。能够爬垂坡或像蜘蛛一样使用一条线缆垂降的机器人可能也会出现。这两者都需要前所未有的机器人操作方式和锚定技术。跨越超远距离的高分辨率和极端照明差异的感知对机器人的感知模型提出了新的挑战。反复的上行和下行对整个天窗的观察覆盖、墙壁和地面的拍摄是可行的。经过深入探索后,漫游者可以重新使用线缆,像蜘蛛一样上升到高处,出洞后进入下一个天窗。
场景2:维护导航点设施的机器人(航点设备管理/维护机器人)
伴随着人类更加深入的太空探索,发展导航点设施被提上日程,其将作为一个到很多目的地的起点(如绕月轨道空间、月球、近地小行星和火星)。这种设备将能够组装和维修卫星、望远镜、深空探险设备。放置这样一种设备的候选位置是地月之间的“L2”拉格朗日点。在这个点上,飞行器只需要很少的能量即可在月球背面处于相对静止的状态。
与持续人工控制的国际空间站(International Space Station, 简称:ISS)相比,预计一个航点设备只需要间歇性的控制。因此,在缺少或没有人类的情况下,为了维护和修理系统,这种有机器人维护能力的设备是非常重要的。这些机器人将通过来自地球的远程操作,监管完成 IVA和EVA工作。遥控机器人往往关注于检查、监控、日常维护和设备的意外事故操作处理及其附属的结构、设备等。特别是国际空间站的实验表明,能源(产生、转换、存储)、生命支持(空气、水、热量)、数据网络和仪器都需要维护。为此,非接触移动传感的检测、移动灵活的操作、监控、诊断和预测、缓解时间延时和安全导航都需要提高。
场景3:执行探索任务的机器人
从行星探索任务的情况看,在人类活动前,机器人侦察对显著增加科学和技术的回报有很大的潜力。在人类进行EVA之前,机器人侦察涉及通过地下控制或者IVA航天员控制操作一个行星漫游者去侦察规划的区,包括:1.基于线路的路线观察;2.基于位置的侦察(在一个区域内观察);3.基于勘测的侦察(在一个横断面上系统地搜集数据);4.纯粹的侦察。为了帮助发展全面的横贯计划,侦察方式需要很大的提升。同时,侦察需要在提出一个现存的横贯计划之前完成,比如调整优先级和修改时间点等。
尽管轨道任务能够产生各种各样的高质量地图,它们却受限于远程感知的约束。行星探测车搭载的仪器能够为地面观测和地下地质学提供补充,这在视野和精度上对轨道来讲都是不可行的。这些表层数据能够改善随后人类参与的任务,尤其是减少目标和行程的不确定性。不仅如此,数据能够用来改善航天员的训练和操作现场的情景。在人类登月活动中,机器人如何观测对于未来人类行星探测活动是一个很好的实例。阿波罗17号的第二次太空行走中,航天员驾驶车辆从着陆点到南部山丘,然后在归途中作业。在第四站(Shorty Crater火山口),哈里森·施密特发现了数堆橘色火山玻璃—或许这是此次任务最重要的发现。然而由于宇航员携带的给养(如氧气)数量有限,所以时间被严格地限制。这些火山材料可以通过机器人进行提前侦察, 使火山口的太空行走有更多的时间。另外,行走路线也可以改为先行访问火山口。
场景4:宇航员远程操作机器人
在规划未来人类探索任务中,一些研究团队提出让宇航员在轨道航天器上利用低延时、高带宽的通信链路对地面机器人进行遥操作。这种操作方法可以视为一种有效方法,它能够在需要人类参与的活动时而又不引起地面行走带来的风险和成本。除此之外,这种方式具有极高的性能,对各种各样的航天器及机器人进行控制(感知、导航等等),因此能减轻机器人对数据处理和航天电子的需求。以航天员为核心的地表遥操作机器人视为几种可行任务之一。
月球背面——航天员在轨道上(或者定位在地球-月球之间的“L2”拉格朗日点)远程操作地面机器人探测月球背面。宇航员能够利用低延迟(少于250ms)和高效的通信来短期任务,使机器人的使用率最大化。
近地小天体(NEO)——宇航员在返回或者在轨,或者离开近地小天体(例如小行星)时,可以远程操作一个机器人着陆在近地小天体表面。宇航员能够从飞行器上控制机器人,因为近地小天体的环境(高旋转速度、快速变化的图像等等)排除了从地球进行远程操作的可能性。
火星轨道——围绕火星的航空轨道上的航天员远程操控地面机器人进行火星探测。当环境(如时效性要求较高的活动、突发事件的处理等等)不允许地球上的远程操作时,航天员将在飞行器上控制机器人。
空间协同探测机器人的关键能力
对象识别和姿态评估
对象识别通常需要在使用某一种感知功能的同时,融合多种感知形式进行工作。这种感知功能可以把感知对象与预先知道的对象关联在一起。姿态评估用于定位一个相对于传感器坐标系的对象,从而使用传感数据来计算六轴机械臂的姿态。在姿态评估之前,通常使用对象识别或对象假设,以使其姿态能够被算法评估和跟踪。这项技术对于研究基于对象的操作、跟踪以及回避对象后的移动是至关重要的。鉴定并识别人类同时跟踪其移动和姿态的能力,是此领域的一项特殊方向;操作控制机器人以便与人类同伴安全工作以及操作移动机器人,以避免与行人碰撞是此领域的主要研究内容。
迄今为止,传感方法结合了机器视觉、立体视觉、激光雷达、结构化光线和雷达等技术。感知方法常常开始于CAD模型或由传感器对象识别技术扫描得到的模型。其包含的主要挑战为:处理一个对象已知的大型“数据库”的能力,识别部分封闭的对象,感知微弱光线(高、低和光线对比鲜明的物体),评估快速翻转对象的姿态和处理近远处位置的对象。一个令人鼓舞的实例是国际空间站上的自由飞行器IVA。对象识别和姿态评估能够使充电站对接、空间站内部导航以及宇航员交流互动(例如“流动之眼”能够自动支持航天人员的活动)成为可能。
基于融合视觉、触觉和力控制的操作能力
随着安全、快速和决定性运动控制的进步,移动机器人技术领域会变得更加成熟。该成功来自于融合多种传感器,以避免联络障碍的技术。操作需要进行接触,所以传感器需要先接近,然后触碰,最终使传感像工具一样能够接触、抓取和使用对象。此外,新的方法对于结构性兼容机械手的设计和控制是必要的,这种机械手可以吸收当接触物体和工具使用时造成的冲击力。视觉也需要传感器,当四肢去抓物体时,视觉传感器能够不频繁发生故障,而且对于移动的控制程序可以标定和移送物体。当开发新的传感器和机构兼容的机械手时,主要的挑战包括校准完全不同的传感器、不同的分辨率、噪声以及其物理特性。
无人驾驶
机械系统有潜力超越人类的耐力、反应时间和并行控制的机器数量。人类在飞行安全和驾驶时间上拥有诸多限制,但这些问题在机械系统中并不存在。人类反应时间,加上人机接口的传输时间,导致当面对紧急状况时的操作有很大的延迟。人类在并行处理多个系统的数据和命令周期时,能力是及其有限的。但是在处理极端情况、解决从未料到的新情况和学习新的飞行技能这些方面,机械系统仍然落后于人类。拟人性能对机器熟练控制复杂系统有很大影响,且要求:(1)让人类脱离于控制循环体;(2)让人类以适当的水平参与如战略方向的制定。
(未完,后续内容请看下期)
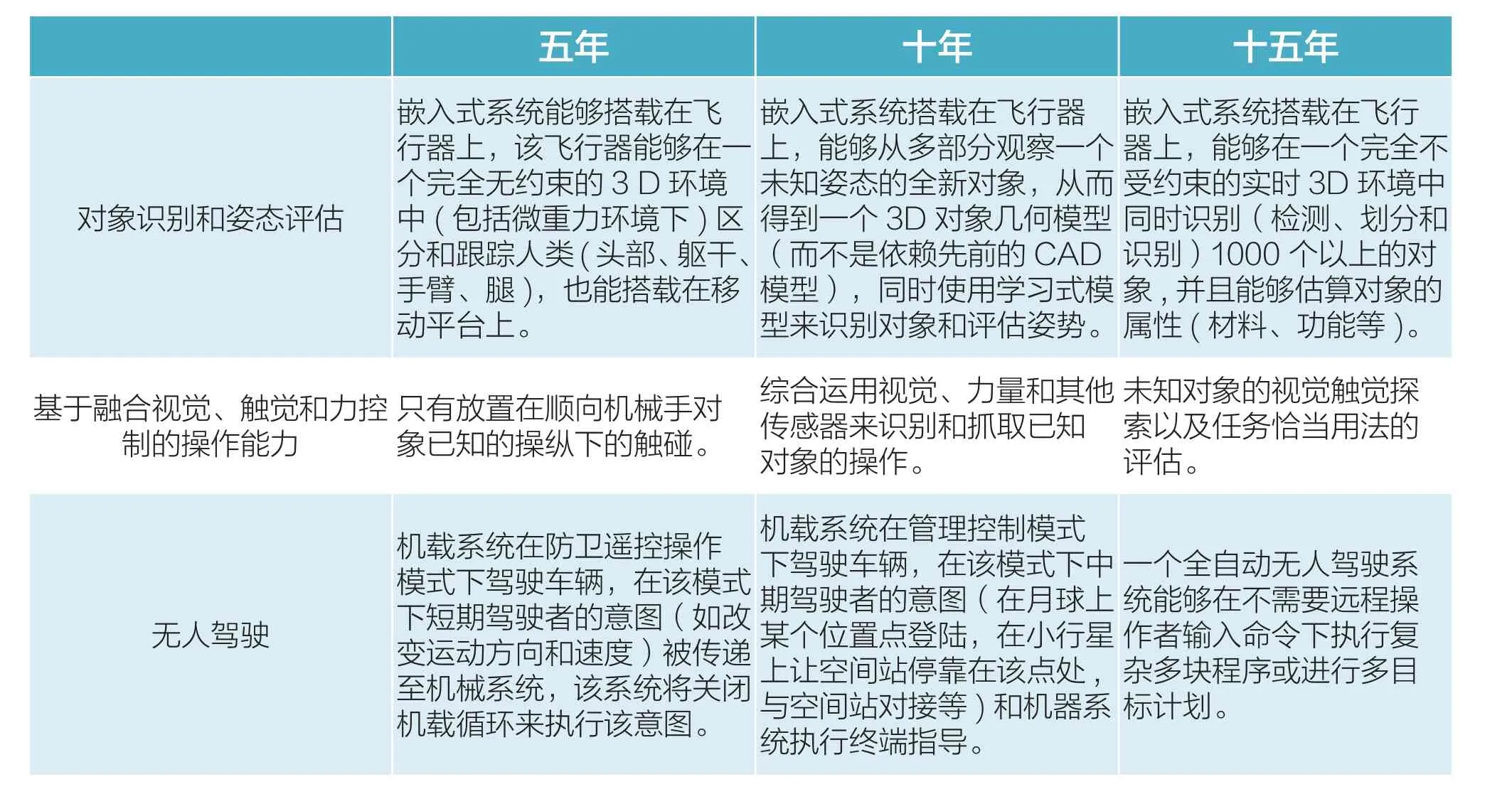
表1 :五年、十年及十五年的目标及里程碑
