空间手写笔笔迹检测系统的研究
2016-12-15生桂勇
生桂勇

摘要:提出了一种基于微加速度计与微磁场强度传感器的空间笔迹检测系统,并对轨迹检测系统的算法进行了详细的描述。该系统可用于识别手写笔在三维空间的运动轨迹,并通过三维空间的姿态角变换矩阵将手写笔动态信息投影到二维坐标平面,经过一系列积分运算最终重现笔迹信息。该系统在系统仿真实验中取得了良好的效果。
关键词:笔迹检测;微加速度传感器;微磁场强度传感器
中图分类号:TP393 文献标识码:A 文章编号:1009-3044(2016)27-0214-03
Abstract: A handwriting detecting system based on an Micro-accelerometer and a Micro-magnetic sensor is proposed. And the algorithm of the detecting system is also described in detail. The motion contrail of the pen in the three-dimensional space can be recognized and through the matrix of stance angle, the dynamic information of the pen is projected to the two-dimensional plane. Then the information of handwriting is recurred on the plane by integral. There were good results in the actual experiment.
Key words: handwriting detecting; Micro-accelerometer; Micro-magnetic sensor
1 引言
计算机手写信息录入渐渐为人们所接受,成为了计算机信息录入的一种主要方式。目前的手写录入系统实现包括两部分动作,首先由手写板感应书写信号,其次将产生有用信息与计算机进行通信,并在计算机中配以相关的汉字识别软件,从而识别出手写汉字。但在这种方式下书写被限制在一个特定的区域,只能在诸如手写板这样的二维空间区域内进行,所以书写的随意性也受到了很大的制约。
本文提出了一种三维空间的手写笔轨迹检测系统,无须手写板配合。该系统基于MEMS加速度传感器与磁场强度传感器,通过对三维空间中手写笔运动姿态角度的计算,获得其在任意时刻的三轴的线加速度值,再经过对所获得的线加速度的投影与积分,得到了确定投影面上的书写笔迹信息。
与以往采用的磁场强度传感器不同,空间手写笔轨迹检测系统由于采用了基于MI技术的磁场强度传感器进行空间角度测量,较以往的MR磁场传感器不会在运行长时间后存在磁阻抗的积累,故无需增加额外的磁阻传感器复位电路,使检测系统电路更加简单,系统稳定性更好。
2 系统构成
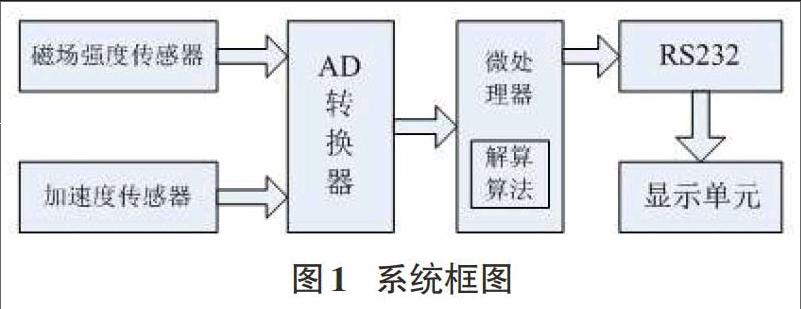
手写笔笔迹检测系统框图,如图1所示,采用单片机作为其控制单元,主要完成手写笔的空间姿态角以及线加速度的解算。数据采集单元应用日本爱知钢铁公司的三轴磁场强度传感器AMI302和Freescale公司的三轴加速度传感器MMA7260Q以及一个12位AD转换器MAX1266。检测系统采用传统的RS232接口方式与计算机通信,便于在计算机上实时显示空间笔的运动轨迹。显示单元可以是PC机或者液晶显示器。
3 系统硬件实现
由图1我们可以清楚地看到系统是由数据采集与数据处理两个主要部分所组成。数据采集单元前面已经提到,它是由三轴加速度传感器MMA7260Q以及三轴磁场强度传感器AMI302所组成。MMA7260Q是测量范围可调的高灵敏度加速度传感器,可以测量运动和静态两种加速度,它在测量范围是±1.5g时的灵敏度是800mv/g。在该系统中需要得到空间手写笔的动态加速度,而静态加速度(即地球的重力加速度作用与传感器上所产生的输出值)是需要被剔除的。AMI302是新一代的磁场强度传感器,具有高灵敏度与可靠性的特点,其灵敏度达到了2.7mv/μT,当磁场强度为0T时其典型输出电压为1.5v。
数据处理部分的处理单元采用ATMEL公司的高档位单片机ATmega128,它应用先进的RISC结构,其关键技术在于使用了流水线操作和等长指令体系结构,一条指令可以在一个单操作中完成,从而实现在一个时钟周期里完成一条或者多条指令,这使它具有高达1MIPS/MHz的高速运行能力。这些优越的性能保证其在手写笔检测系统中完全满足系统的要求。手写笔笔迹检测系统电路实物图如图2所示。
4 手写笔笔迹检测算法
4.1 手写笔物理模型
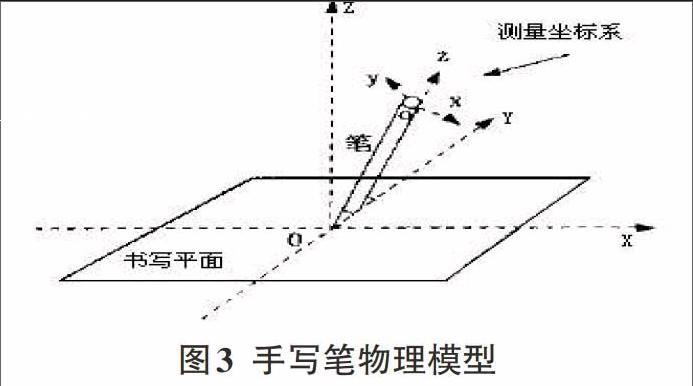
如图3所示,为手写笔在三维空间的物理模型,其中OXYZ平面为书写平面,即笔迹信息的最终投影面,oxyz平面为手写笔在三维空间运动过程中的动态坐标系,即传感器的安装坐标系。为得到投影于书写平面笔迹,需要得到如下物理量:测量坐标系三轴实时磁场强度Cx、Cy、Cz,测量坐标系三轴实时加速度Ax、Ay、Az以及手写笔在空间运动时的俯仰角φ(oz轴与书写平面的夹角)、横滚角θ(oy轴书写平面的投影与OY轴的夹角)、航向角ψ(ox轴与书写平面的夹角)。
4.2 笔迹实现算法
在空间笔轨迹检测系统的实现过程中包括以下几个部分:书写平面确定、姿态矩阵的获得以及投影面空间笔线加速度的实现。
首先确定书写平面,由此得到空间笔初始位置的磁场强度传感器输出值Ti=[Tx,Ty,Tz]以及加速度传感器输出值A=[ Ax,Ay,Az],即为地球重力加速度在此坐标系下的分量。当系统的采样率较高时,可认为手写笔在三维空间的姿态角变化很小,属于刚体定点运动的小角度近似问题,故可以将方向余弦矩阵近似为姿态角矩阵,如式1所示。
在书写过程中,可认为θ保持不变,所以θ=0。于是得到空间姿态变换公式如式2所示,其中Ti1为对手写笔新位置的磁场强度采样值。由公式2即可以得到两次测量所出现的姿态角的变化值,如式3所示。
笔迹检测算法的核心问题是解算投影平面的三轴线加速度。由公式2计算得出姿态角矩阵C,根据公式4可得出新位置的重力加速度分量。其中A1为手写笔新位置的重力加速度分量。
在得到新位置的重力加速度分量后,由于加速度传感器的输出值为线加速度与此位置重力加速度的矢量和,故设加速度传感器的输出值为As,测量坐标系得线加速度为AL,书写平面的线加速度为Al1,则如式5所示。
通过余弦矩阵变换如式6所示,将测量坐标系的三轴线加速度投影到书写平面从而得到书写平面上的手写笔的投影轨迹,其中方向余弦矩阵中的φ、ψ分别是式3中之前位置角度变化的累加值。
由上面分析可以得到手写笔笔迹重现所需要的二维坐标平面上的加速度参数,以用于以后笔迹的重现。
5 系统仿真结果分析
在监测系统测试过程中我们在三维空间中依次对圆,阿拉伯数字“2”、“3”进行测量,分析这三种笔画的动态特性,得到如图所示的动态特性曲线。在传感器的安装过程中,加速度传感器x轴在投影面上的投影所指向的方向垂直于投影面,对于重现笔迹不起作用,于是若要重现笔迹则仅仅需要加速度传感器y轴与z轴的输出量在投影面的分量。如图4、5、6分别是圆、“2”、“3”这三种笔迹的加速度曲线。
由图可以清楚地看出,书写以上三个轨迹时加速度曲线呈较为明显的正弦曲线变化,而将其进行两次积分后,能够较为准确地还原出书写轨迹,如图7、8、9所示。但由于数模转换过程中采样频率较低以及安装误差,会出现不同程度的干扰,在经过软件滤波后得到了一定的改善。
6 结束语
本文介绍了一种基于MEMS惯性传感器的书写检测系统,通过采集手写笔的加速度信息及角度的变化,得到了运动过程中的轨迹,完成了书写过程的还原,测试结果印证了原理的准确性。今后要展开的任务包括传感器数据的融合以及分析两次积分的累积误差,以得到更精确的轨迹。另外,改变现有的手写笔与计算机的通信方式也是今后要解决的一个问题。
参考文献:
[1] 张树侠,孙静.捷联式惯性导航系统[M].北京:国防工业出版社,1992.
[2] 朱荣,周兆英.基于MEMS的姿态测量系统[J].测控技术,2002,21(10):6-8.
[3] 侯向锋,刘荣,周兆丰.加速度传感器MMA7260在步态特征提取中的应用[J].传感技术学报,2007,20(3):507-511.
[4] 邵婷婷,马建仓,胡士峰.电子罗盘的倾斜与补偿算法的研究[J].传感技术学报,2007,报,2007,20(6):1335-1337.
[5] Caruso M J,Bratland T,Smit h C H, Schneider R.A new Perspective on Magnetic Sensing[J ]1 Sensors (USA), 1998,15(12):34246.
[6] Hine.A Magnetic Compasses and Magnetometers[M].London: Adam Hilger L TP,1968.270.
[7] 刘扬,贾海涛,曹丽手写动态特征采集系统的实现[J] .仪器仪表学报,2005,26(8):526-528.
