基于激光位移传感器的城市轨道交通车辆轮对尺寸在线检测系统*
2016-12-15李海玉程晓卿苏钊颐邢宗义王晓浩
李海玉 程晓卿 苏钊颐 邢宗义 王晓浩 王 贵
(1.广州地铁集团有限公司,510308,广州; 2.北京交通大学轨道交通控制与安全国家重点实验室,100044,北京//第一作者,高级工程师)
基于激光位移传感器的城市轨道交通车辆轮对尺寸在线检测系统*
李海玉1程晓卿2苏钊颐1邢宗义2王晓浩2王 贵2
(1.广州地铁集团有限公司,510308,广州; 2.北京交通大学轨道交通控制与安全国家重点实验室,100044,北京//第一作者,高级工程师)
车轮磨损是城市轨道交通日常运营的一大安全隐患。提出了一种基于2D激光位移传感器的列车轮对尺寸在线测量的新方法,阐明了该测量方法的系统构成及在线测量原理。系统由两组激光位移传感器和两组激光对射开关组成,通过激光位移传感器测量轮对外形轮廓线,然后根据踏面几何关系得到轮缘高、轮缘厚尺寸值;提取同一车轮通过该在线测量系统时传感器输出的各时刻轮缘顶点坐标,经时空还原将轮缘顶点变换到同一时刻的轮缘顶点圆上;通过最小二乘拟合圆得到车轮直径。现场试验结果表明,该轮对尺寸在线测量系统能满足轮对尺寸的现场实际测量要求,为轮对尺寸在线非接触式测量提供了一种新的解决方案。
城市轨道交通车辆; 轮对尺寸; 激光位移传感器; 在线测量
First-author′s address Guangzhou Metro Corporation,510308,Guangzhou,China
轮对作为地铁车辆走行系的重要组成部件,承受来车辆的全部静动载荷,对列车运行的安全性、舒适性起着关键作用[1]。及时准确地对列车的轮对外形尺寸进行检测,掌握轮对外形尺寸的变化情况,对避免列车故障的发生及提高轮对的使用寿命有着重要意义。
轮对尺寸检测主要采用人工接触式测量和在线非接触式测量两种方法[2]。随着CCD(电荷耦合器件)技术和激光技术的发展[3-4],在线非接触式测量已成为轮对尺寸测量技术的主流。文献[5]提出采用基于CCD图像测量技术的光截图像测量方法。文献[6]采用激光扫描仪和照相机构成的测量系统测量车轮轮廓磨损、表面缺陷及车轮不圆度检测。文献[7]提出采用两个激光位移传感器和一个涡流定位传感器构成检测系统测量车轮直径。
本文提出了一种基于激光位移传感器的轮对尺寸在线检测技术与系统:首先采用两支激光位移传感器实现踏面轮廓线的绘制,并根据踏面几何关系获取轮缘高与轮缘厚的值;然后采用时空变换法将不同时刻的轮缘顶点坐标等价为一组轮缘顶点圆上的点;最后采用最小二乘拟合圆的方法求得车轮直径。所提出的系统仅采用两个激光位移传感器等简单测量元件就可实现完整的轮对尺寸在线测量,具有成本低、操作简单、精度高、非接触式测量等优点。
1 轮对尺寸在线检测系统的组成
1.1 轮对尺寸
车辆轮对是由两个相同的车轮和一根车轴组成的整体。车轮滚压在钢轨上的接触部分称为踏面,车轮踏面内侧有一沿圆周突起的凸缘称为轮缘,其轮廓线如图1所示。距离内侧面70 mm处的踏面点称为踏面基点,将踏面基点对应的车轮直径值定义为该车轮的直径,将基点到轮缘最高点的高度差定义为轮缘高,将内侧面到比基点高出规定高度(一般为10 mm)所对应横向距离定义为轮缘厚[8]。城市轨道交通列车常采用840标准轮对,其运用轮径一般在770 mm至840 mm之间,其运用轮缘厚一般在26 mm至32 mm之间。
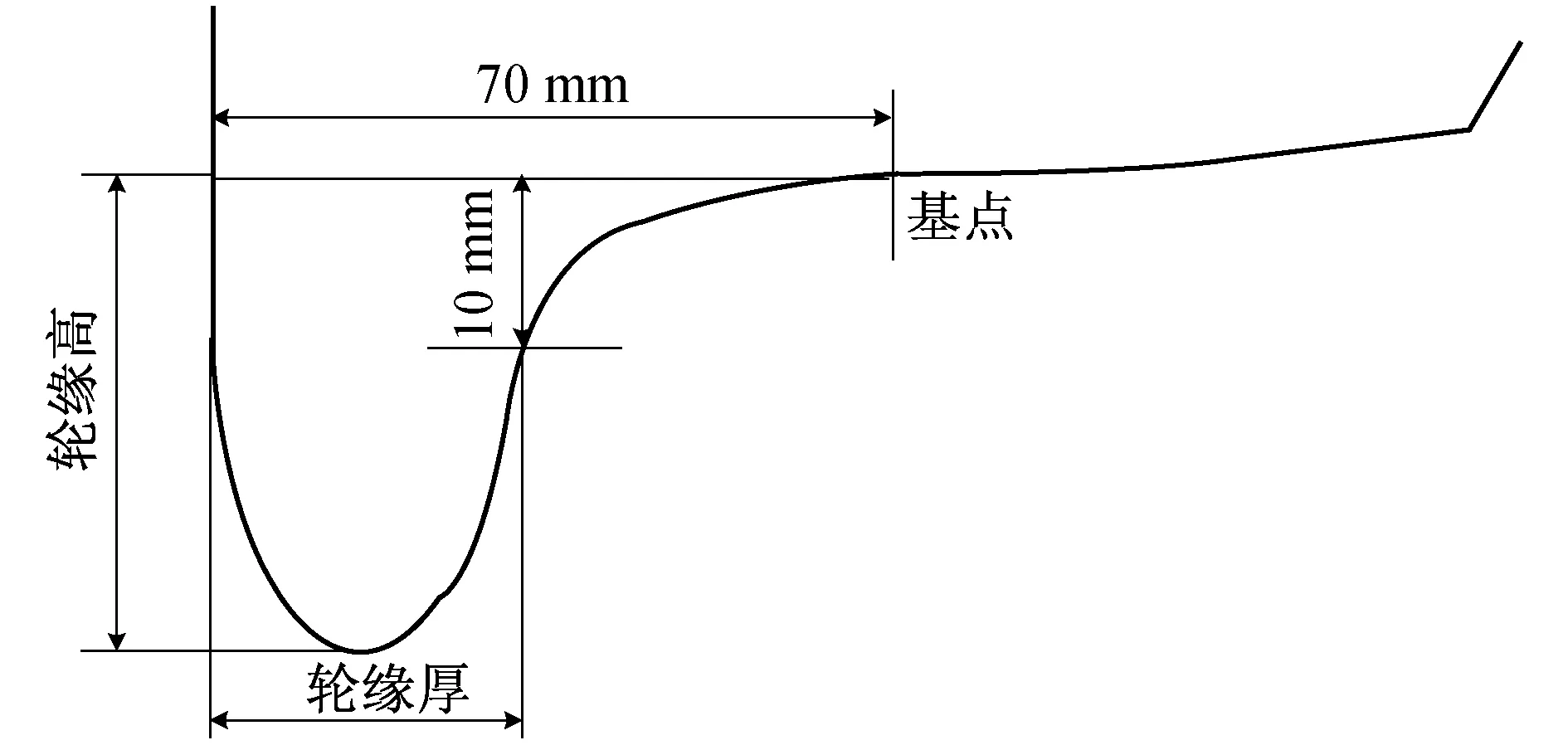
图1 车轮轮廓线示意图
轮缘高、轮缘厚和车轮直径可以基本反映出一个车轮的磨耗情况,当超过标准轮对尺寸数值时,证明车轮已经磨损,需要整修或者更换[9]。为了及时掌握轮缘厚、轮缘高及轮径等尺寸的变化情况,对车轮外形尺寸进行精确检测就显得尤为必要。
1.2 系统结构
轮对尺寸在线检测装置包括两组2D激光位移传感器、激光对射开关、车号识别器、磁钢、工控机等,其布局如图2所示。
设t1时刻为横坐标原点,即x1=0,则对n次采样的横坐标进行时空变换:
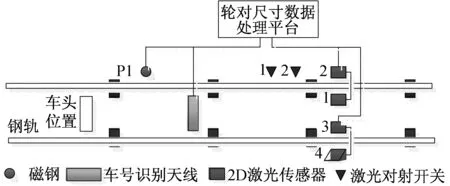
图2 轮对尺寸在线检测系统结构布局
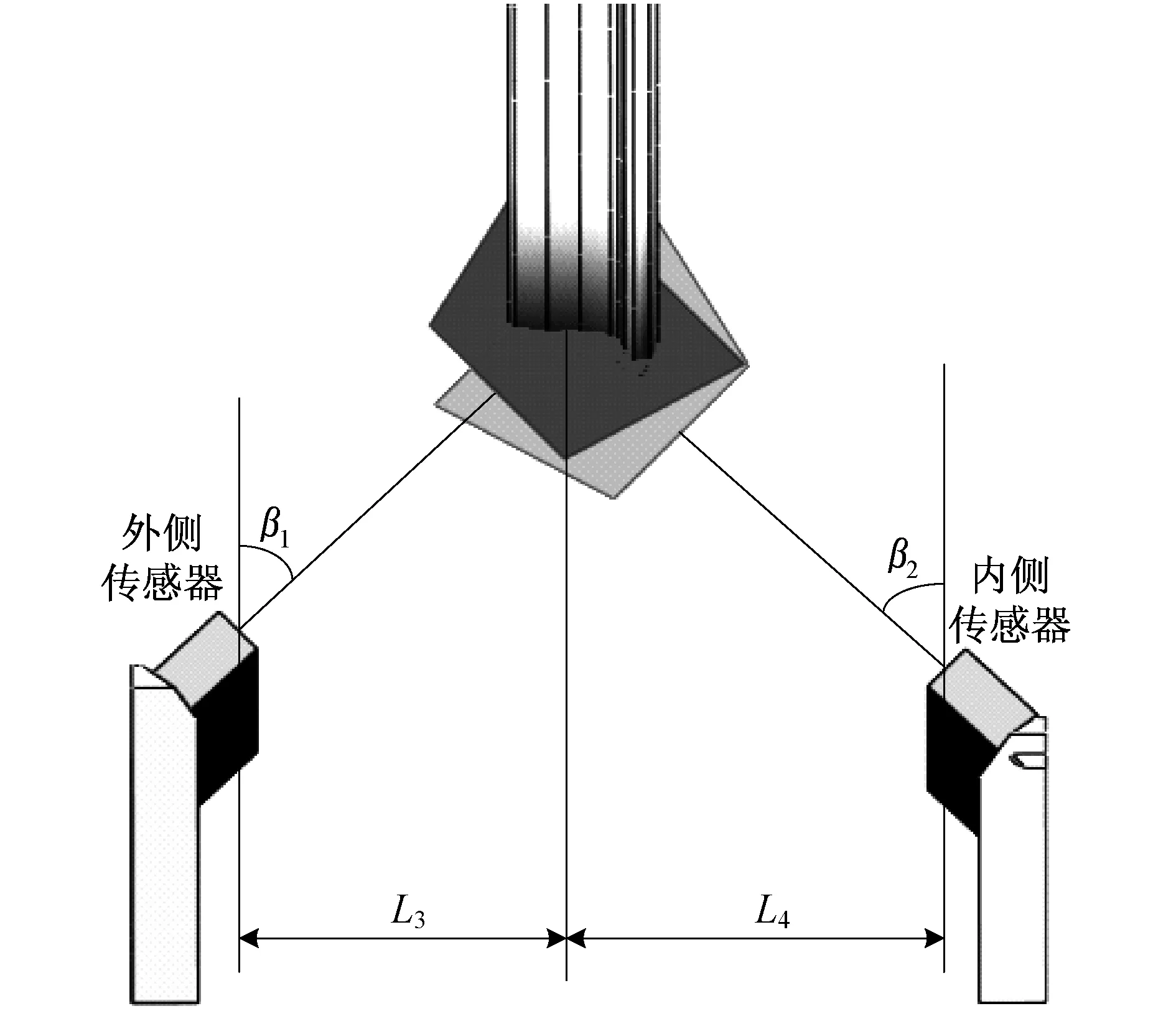
图3 激光位移传感器安装示意图
2 系统工作原理
2.1 系统工作流程
简单线性迭代聚类(Simple Linear Iterative Clustering,SLIC)是Achanta等人提出的一种思想简单、实现方便、在局部进行比较计算的快速聚类算法。该方法首先将具有 RGB真彩图像转换到 CIELAB图像空间中,再利用其颜色空间中的1个亮度分量(l),2个颜色分量(a、b),将3个分量以及坐标轴x、y构成一个五维空间[l,a,b,x,y]向量k-means聚类。算法步骤入下[8]:
十九大报告明确指出,推动形成全面开放新格局,要以“一带一路”建设为重点,赋予自由贸易试验区更大改革自主权,探索建设自由贸易港。从总体上看,“一带一路”倡议与自贸试验区建设互为补充,“一带一路”建设的“五通”与自贸试验区的“四化”两者高度契合,共同推动形成全面开放新格局[注]张时立:《中国自贸区建设与“21 世纪海上丝绸之路”——以上海自贸区建设为例》,《社会科学研究》2016年第1期,第58页。。
2.2 轮缘尺寸测量原理
经过以上纵坐标值的坐标旋转和横坐标值的时空变换,可获得在同一时空坐标系下的n个轮缘顶点。
学习的最好刺激是对学习材料的兴趣。多媒体集“声、色、画、乐”于一体,形象生动地展现教学内容。课程改革要求英语教学从知识、技能、情感态度、文化意识及学习策略方面对学生进行培养,发展学生的综合语用能力(程晓堂,2004)。要求教师充分利用多媒体提供丰富的材料,让学生进行有目的的阅读实践,加强对语言信息的理解,注重自主、探究、合作学习的意识培养,养成学习习惯,运用学习策略。下面根据《英语课程标准》相关要求,以牛津高中英语模块二第三单元Reading部分The Curse of Mummy为例,具体阐释多媒体在英语阅读课堂的运用。
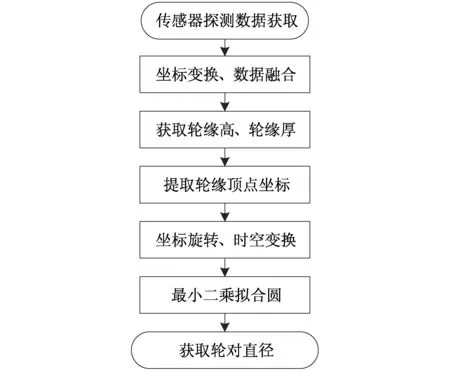
图4 轮对尺寸在线检测系统流程图
(1)
(2)
对轨道内侧激光位移传感器输出的二维坐标值根据以下公式进行坐标变换:
(3)
(4)
(1)~(4)式中:

β1、β2——传感器与纵向竖直线的夹角;

轨道内侧和外侧两支激光位移传感器输出数据坐标变换后,再通过式(5)和式(6)的数据融合得到踏面数据,如图6所示。由图6可见,轮对踏面轮廓线是由离散的数据点组成的。为了准确地计算出轮缘高、轮缘厚等尺寸,采用曲线拟合的方法将这些离散的点拟合成一条连续的轮廓线[11],再根据踏面轮廓几何关系算出每个时刻数据融合后的轮缘高及轮缘厚,结果如表1所示。针对轮缘高及轮缘厚,去掉6组数据中的最大值和最小值,对剩余的4组数据求取平均值作为最终计算值。
(5)
(6)
式中:
(p,q)——外侧传感器的原始坐标原点在内侧传感器变换后的坐标系中的坐标值;
2.3 直径测量原理
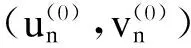
在列车运行过程中,当车轮进入激光位移传感器有效探测区间时,激光位移传感器可在每次测量时输出轮缘顶点的坐标值,从而可以获取一组轮缘顶点坐标;在列车运行速度已知的情况下,可以将这一组坐标值通过坐标旋转与时空变换,得到在同一时空坐标系下的一组坐标值;然后通过最小二乘法进行轮缘直径的拟合。
列车运行速度由激光对射开关采样计算:
v=L1/(T1-T2)
(7)
式中:
L1——两激光对射开关的安装距离;
食品级壳聚糖(脱乙酰度>95.38%,粒度0.178 mm,黏度50 mPa.s)由济南海得贝海洋生物工程有限公司提供。抗氧化及血清激素剂试剂盒购买于南京建成生物工程研究所。
T1、T2——车轮通过激光对射开关1、2时触发开关信号的时刻。
由于激光对射开关与激光位移传感器的距离L2小于100 mm,因此可以认为激光对射开关计算得到的速度等于车轮通过激光位移传感器有效探测区间的速度。图5为有效区间的一组轮缘顶点示意图。
目前各高校图书馆还不具备专业的布展设施,往往根据临时的展览活动需求及展览规模,在馆内现有空间内因地制宜寻找相应的展览地点,并根据需要、展品珍贵程度、财力大小选择租用陈列柜。但这在展览的呈现效果及专业度上都显得不足,展柜等配置不能与展品良好地匹配,无法营造较为专业化的观展体验。
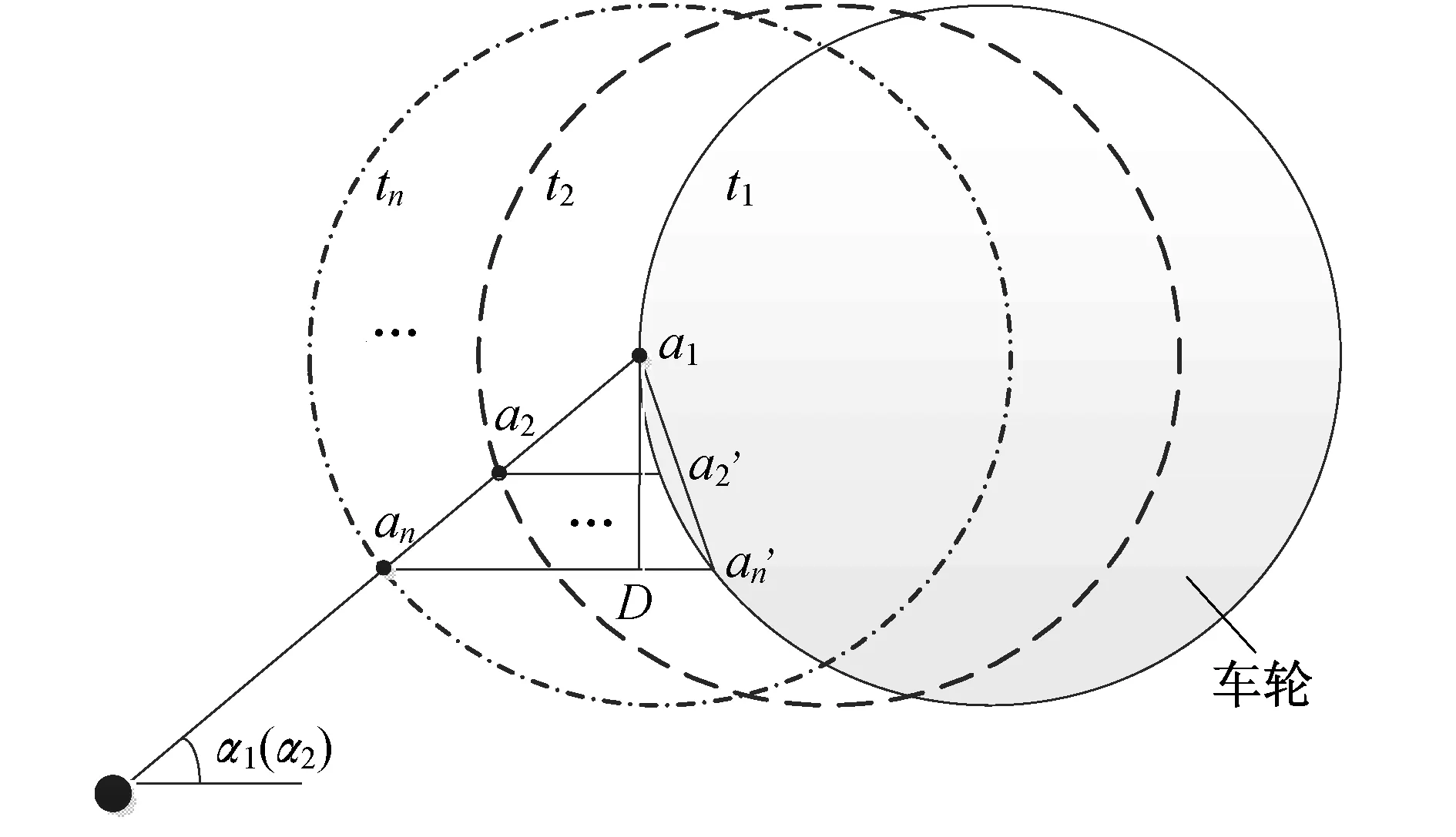
图5 有效区间的一组轮缘顶点示意图
设在列车运行过程中,激光位移传感器针对同一车轮总计有效采样n次,采样时刻为t1,t2,…,tn,轮缘顶点位置为a1,a2,…,an,其对应的坐标分别为(x1,y1),(x2,y2),…,(xn,yn)。对n次采样得到的纵坐标值进行坐标旋转:
Yi=yicos(90°-α)=yisin α,i=1,…,n
(8)
式中:
α——传感器与纵向水平线的安装角度,如图5所示。
其次,这种观点也会使得立法目的落空。如果以默示许可理论来理解平行进口,专利权人完全可以在合同中排除对中国专利的许可。这样买方将无法将产品平行进口到中国境内,促进先进产品进入中国的政策目的就落空了。
两个激光对射开关沿一条轨道外侧并排安装,两者之间的安装距离为L1;两组激光位移传感器分别成镜面对称安装于激光对射开关之后的两条轨道两侧,激光对射开关2与激光位移传感器2的安装距离为L2,L2在100 mm范围内。两组激光位移传感器与轨道的相对距离L3、L4均在100~450 mm范围内,激光位移传感器的激光探测面处于同一平面,传感器与铅垂线的夹角为β1、β2,如图3所示。
Xi=v(ti-t1)-(y1-yi)cotα
(9)
式中:
轨道内侧和外侧的激光位移传感器同时探测车轮,得到两组探测点坐标后,可通过坐标变换和坐标平移使输出点融合到同一坐标系上。对轨道外侧激光位移传感器输出的二维坐标值根据以下公式进行坐标变换:
v——列车运行速度。
如图3所示,安装于轨道内侧的激光位移传感器可以获得内侧面轮缘及部分踏面外侧轮廓,安装于轨道外侧的激光位移传感器可以获得踏面及轮缘外侧轮廓。两支传感器融合即可获取完整的车轮轮廓线数据,从而进行轮缘尺寸的计算。
谢天谢地,呼伦冲进厨房的时候,水壶还在蹿着热气。做错事的丈母娘站在客厅,战战兢兢地给云梦讲述事情的经过。云梦一边安慰她,一边偷看着呼伦的脸色。呼伦说没事没事,虚惊一场……其实我和云梦也常犯这样的错误。既然女婿说没事,老人也就放心了,忙打开电视看连续剧,嘴里念叨着好在没晚好在没晚。一边的呼伦立刻傻了眼,电视剧竟然又他娘蹦出个三十集的续!心想指望客厅没有动静是不可能了,只能关紧书房的木门,再打开书房的窗户,然后把自己包得像一只过冬的蛹。
采用最小二乘拟合圆对轮缘顶点圆上n个点的坐标(Xi,Yi)进行直径计算,
斯里兰卡是宝石王国,拥有红宝石、蓝宝石、猫眼、紫水晶、翡翠等80多个宝石品种,斯里兰卡整个国家90%的国土都分布着出产宝石的母岩,且有"宝石如白菜"之说。充分体现了这座宝石之国矿产的丰富与国土的富饶。3000多年来斯里兰卡向全世界供应了不计其数的宝石,美国国家博物馆中80%的高档宝石来自斯里兰卡,世界上最大的蓝宝石,星光红宝,星光蓝宝,猫眼,亚历山大石(变石)均来自斯里兰卡。
轮对尺寸在线检测系统工作流程如图4所示。

(10)
式中,a=-2x0,b=-2y0,并且
其中C、D、E、G、H为中间参数,分别如下:
Dm为轮缘顶点圆直径,减去两倍轮缘高即为该车轮的直径。
3 实例分析
在广州地铁集团有限公司赤沙列车段进行了轮对尺寸在线检测系统的现场试验。两个激光对射开关的安装距离为200 mm,即L1=200 mm;激光位移传感器与铅垂线安装夹角为45°,即β1=β2=45°;与轨向水平线安装夹角为45°,即α1=α2=45°。试验过程中列车以低于3 km/h的限速通过检测系统,激光对射开关触发时间差为132 ms,激光位移传感器采样间隔为33 ms。
列车通过轮对尺寸在线检测系统时,针对待测轮对,激光位移传感器输出6组有效数据,即n=6。将(t1,t2,…,t6)时刻的传感器输出数据按式(1)和式(2)进行坐标变换:
将坐标变换后的两组数据进行融合:
但我们也应当清醒地意识到,与发达国家相比,在绿色农药的新结构、新品种、环境友好新剂型的研究开发方面,与国际先进水平仍有较大的差距。同时,行业长期以来的粗放式发展,安全环保事故频发,处于产业链低端,且大宗产品产能过剩,使得部分地方与民众对农药生产持有强烈的抵触情绪和反对态度,使行业发展蒙上阴影。但是,目前不加区别的一刀切式强令停工停产,迫使农药制造有加速向印度等国转移的趋势。一旦失去了包括农药工业在内的中国制造业优势,可能再也回不来了。中国改革开放以来巨大的进步和发展证明:“化工及农药生产解决了我们的衣食住行,改善并将继续改善我们美好的生活”。
针对得到的6组数据绘制的轮廓线,提取纵坐标最小的点,即得到不同时刻轮缘顶点坐标,其结果如表2所示。
图6 在传感器固有坐标系下数据融合的踏面位置坐标

mm

表2 不同时刻的轮缘顶点纵坐标值 mm
将提取的纵坐标按式(8)进行坐标变换:
海纳曦花园小区庭院位于临沂市罗庄区,总面积235.1 m2,地势平坦.属暖温带季风区大陆性气候,春季干燥多风,夏季炎热多雨,秋季凉爽干燥,冬季干冷少雨.具有气候适宜,四季分明,光照充足等特点.年平均气温13.3 ℃,年均降水量793.9 mm,年日照时间2314 h.受季风带影响,春季盛行东风和东南风,夏季盛行南风和东南风,秋季多为西风和西南风,冬天多为北风和西北风,多年平均风速为2.7 m/s.
“小弟,说话别带刺儿!”孙曼玲教诲弟弟,转脸又对徐进步说,“‘地包’是我们哈尔滨市的一个区,我家住那区。”
Yi=yi·sin45°。
按式(8)变换结果如表3所示。

表3 经坐标旋转后纵坐标值 mm
对n次采样的横坐标按式(9)进行时空变换:
Xi= v(ti-t1)-(y1-yi)cot45°
其中t1=0,ti=(i-1)×33 ms。
根据激光对射开关的触发时间T1、T2及两激光对射开关的安装距离L1,按式(7)可得列车运行速度为:
土墙日光温室前坎改造主要是杜绝砼圈梁热传导散热,传统方法是前坎外挖防寒沟,填埋草秸等轻质保温材料,现可以采用外墙外保温技术,隔热材料宜选用模塑聚苯乙烯泡沫塑料板贴前坎外沿,阻断热传导。对于前坎室内坡面风化和坍塌,采用包砖、浆砌石护坡处理,或包覆塑料薄膜[4]。对畦面下沉幅度达到1.3m以上的半地下式土墙日光温室,可以将温室内的行走通道和水渠重新布置到前坎下,形成前通道方式的布局,充分利用温室内后部光照、热量良好的优势进行生产,光照少的南端前坎下部可以用于通道、水渠等非生产用地,可以充分利用宝贵的温室内土地资源[5]。
v=200 m/132 s=1.515 m/s
则时空变换后的横坐标如表4所示。
直到前段时间去希腊的圣托里尼海岛餐馆,我对于死亡的定义才得以更新。看了传说中最美的日落,走过蓝顶教堂、白色小巷、彩色沙滩,嬉水在蔚蓝海滩边,我和同行的朋友乘兴随意漫步在伊亚小镇。海岛风情独特,引人入胜,可最令我惊叹的,还是几乎家家门前都可见的小玻璃柜。

表4 经时空变换的横坐标值 mm
将表3和表4中的6个坐标点通过式(10)的最小二乘拟合圆法,可求得直径Dm为849.88 mm,则车轮直径为:
Dfinal=Dm-2×28 mm=793.88 mm
轮对尺寸在线检测系统测量得到的轮缘厚为28.25 mm,轮缘高均值为28 mm,轮径为793.88 mm。现场操作工对同一车轮进行复核测量,人工测量得到的轮缘厚为28.1 mm,轮缘高为27.9 mm,轮径为794.3 mm。轮对尺寸在线检测系统测量结果与人工现场测量结果的误差很小,其中轮缘尺寸偏差小于0.2 mm,轮径尺寸偏差小于0.5 mm。由此可见,本文提出的轮对尺寸在线检测系统能够满足现场轮对尺寸测量及维修的需求。
4 结论
本文提出了一种城市轨道交通列车轮对尺寸在线测量的方法,通过2D激光位移传感器和激光对射开关构成的轮对尺寸在线测量系统,实现了轮对尺寸的精确测量。通过计算现场实际采集数据得出结果与实际人工测量结果相比对,计算结果与实际值之间的误差满足现场要求,可以用该系统对正常运行的列车车轮尺寸进行动态在线测量。该系统具有成本低、操作简单、非接触式测量等特点,为实现轮对尺寸在线非接触测量提供了一种新的解决方案。
通过现场试验发现,该方法的轮对尺寸检测精度对车轮通过该系统时的速度检测精度要求较高,下一步的工作将就如何提高列车运行速度的检测精度进行深入研究。
[1] 陈刚,任光胜.列车轮对状态在线检测系统研究[J].城市轨道交通研究,2012,15(10):79.
[2] 李学雷.轮对参数全自动测量系统[D].成都:西南交通大学,2005.
[3] 曹贺,王泽勇,周伟,等.基于 CCD 的列车轮对在线检测系统的应用研究[J].信息技术,2011(10):98.
[4] MINEO C,CERNIGLIA D,PANTANO A.Numerical study for a new methodology of flaws detection in train axles[J].Ultrasonics,2014,54(3):841.
[5] 张甬成.列车轮对动态检测装置[D].成都:西南交通大学,2011.
[6] DANNESKIOLD-SAMSOE U,RAMKOW-PEDERSEN O.New On line Monitoring System of Surface Defects and Profile Wear[J].ZEV UND DET GLASERS ANNALEN,2001,125(9/10):429.
[7] 冯其波,张志峰,陈士谦,等.一种激光位移传感器动态测量列车车轮直径的新方法[J].中国激光,2008,35(7):1059.
[8] 中华人民共和国铁道部.机车车辆车轮轮缘踏面外形:TBT 449—2003 [S].
[9] 官鑫.基于激光测距的车轮踏面外形测量仪的研究[D].成都:西南交通大学,2010.
[10] 朱跃,俞秀莲,邢宗义.城轨列车轮对尺寸在线测量系统的研制[J].机械制造与自动化,2014(2):36.
[11] 陈国锋,王捷,钟晓波,等.车轮踏面外形测量的数值处理[J].城市轨道交通研究,2014(1):78.
Online Measurement System of Urban Rail Transit Wheel Set Size Based on Laser Displacement SensorLI Haiyu, CHENG Xiaoqing, SU Zhaoyi, XING Zongyi, WANG Xiaohao, WANG Gui
Rail transit wheel wear has become increasingly prominent in daily operation. A new method with train online measurement of wheel size based on 2D laser displacement sensor is proposed, the system configuration and the online measurement principle are illustrated. The system consists of two laser displacement sensors and two laser beam switches, which are used to measure the contour of the wheelsets, get the rim height and rim thickness dimension based on the tread surface geometric relationship, and extract the sensor outputs about rim vertex coordinates based on the same wheel when the train passes through the system at different moments. The time and space reduction transformation of the rim vertex coordinates from different moments is used to obtain a series of points on the rim vertex circle. Finally, the wheel diameter is calculated by the least squares method. The field test results show that the online measurement system of wheel size can satisfy the actual site measurement requirements, and provides a new solution to the online non-contact measurement of wheel size.
urban rail transit vehicle; wheel set size; laser displacement sensor; online measurement
*国家重点研发计划项目(2016YFB1200402)
U 270.331+.1
10.16037/j.1007-869x.2016.09.003
2014-11-30)
