基于ADAMS和AMESim联合仿真的调绳器动态特性分析
2016-12-15李军霞何月华
李军霞,何月华
(1.太原理工大学 机械工程学院,太原 030024;2.山西省矿山流体控制工程技术研究中心,太原 030024;3.徐工集团 工程机械股份有限公司 建设机械分公司,江苏 徐州 221004)
基于ADAMS和AMESim联合仿真的调绳器动态特性分析
李军霞1,2,何月华3
(1.太原理工大学 机械工程学院,太原 030024;2.山西省矿山流体控制工程技术研究中心,太原 030024;3.徐工集团 工程机械股份有限公司 建设机械分公司,江苏 徐州 221004)
为全面分析调绳器的机-液耦合复杂系统,提出了基于数字化虚拟样机的评估方法。通过ADAMS与AMESim软件接口,关联调绳器液压系统模型与机械模型,建立调绳器的机-液耦合仿真模型和实验样机,分析了调绳器的动态特性。结果表明,锁绳装置可以快速锁紧钢丝绳;在锁绳状态下,通过预紧力油缸反向作用力,可以顺利打开锁绳装置。耦合仿真模型和试验样机可用于调绳设备方案设计、性能评估,也可用于系统优化研究。
调绳器;机液耦合;动态特性
提升机钢丝绳在使用过程中,受钢丝绳提升循环次数、载重量等因素影响,会产生一定的塑性伸长[1]。钢丝绳伸长会带来严重的安全隐患,影响矿井生产[2-5]。首绳过长,会使提升系统两提升容器在停车时偏离正确位置,造成装载或卸载困难,影响矿井生产效率[6-12]。首绳长度的调节关系到煤矿生产,具有重要意义。传统调绳方法有:利用张力平衡油缸调绳[13-15],利用手拉葫芦调绳[16]等方法,存在费时费力、可靠性低、安全性差等缺点。全自动调绳设备可以很好地克服这些缺点,利用该调绳设备可以减少人力物力,提高调绳的效率和安全性[17-20]。目前,很多的厂家开发出了调绳设备,但限于应用时间尚短,调绳设备存在开发周期长、成本高等问题。针对这一问题,笔者利用计算机辅助设计技术,用ADAMS软件建立调绳器虚拟样机,联合AMESim中建立的液压系统模型,通过设置AMESim与ADAMS之间的通讯接口,实现AMESim液压系统模型与ADAMS虚拟样机技术之间数据的交互,以及调绳器机-液耦合复杂系统的联合仿真,观察系统设计的机械液压匹配性及系统动态特性,达到虚拟设计的目的,提高设计成功率。根据虚拟设计的结果,制作了相应的样机,并模拟工况现场的条件与仿真结果进行对比,对调绳设备进行全方位的评估与检测,验证了仿真结果的准确性与可靠性。
1 调绳器工作原理
调绳器是调绳设备机械结构上的一部分,调绳设备就是利用上下两调绳器的锁紧油缸交替锁紧,配合提升系统实现提升罐笼的作用。图1所示为上调绳器的三维结构示意图,图2为调绳系统的液压原理图。

图1 调绳器三维模型Fig.1 Three-dimensional model of rope adjusting device
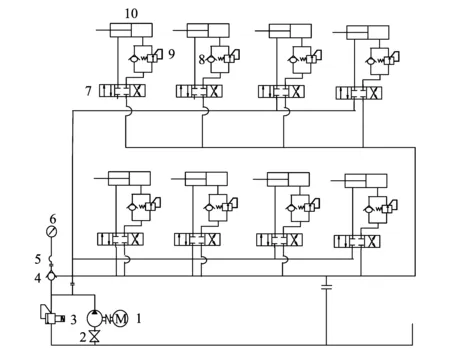
1-电机;2-柱塞泵;3-电磁溢流阀;4-测压接头;5-测压软管;6-压力表;7-换向阀(34SO-L10H);8-单向阀;9-减压阀(Y-34H);10-预紧力油缸图2 调绳设备液压系统Fig.2 Hydraulic system of rope locking device
调绳器在工作时,首先向预紧力油缸10无杆腔充高压油,将楔形块打开;其后,将钢丝绳置入楔形块绳槽;再向油缸10有杆腔充高压油,楔形块在油缸力作用下锁紧钢丝绳。有杆腔压力越大,楔形块与钢丝绳接触面越多,摩擦力越大,从而锁绳效果越好;但是,楔形块锁紧钢丝绳后,由于自锁作用打开时会相对缓慢,压力过大会造成导向部分变形,因此在液压系统中引入了减压阀9,降低打开时的压力。
2 调绳器机-液耦合仿真建模
以某矿使用的调绳设备具体尺寸为基础,根据图1在ADAMS中建立了调绳器的三维模型,定义了各零部件间的约束。由锁绳原理可知,预紧力油缸提供初锁力,锁紧楔形块在初锁力的作用下初步锁紧钢丝绳,在负载作用下,楔形块随钢丝绳向下移动,最终锁紧钢丝绳。由此可知,整个运动过程,动力学模型输出速度、位移,液压模型输出初锁力,由此可以确定仿真的输入输出关系。ADAMS与AMESim联合仿真时,动力学模型向液压模型输出楔形块的速度和位移,液压模型则向动力学模型提供作用力。因此,需要在AMESim模型中添加力传感器,检测活塞杆受力情况,并通过数据接口进行传递。同时,添加速度位移传感器接收动力学模型中楔形块速度与位移数据,分别将传感器与接口模块对应端口链接,建立的耦合仿真模型如图3所示。
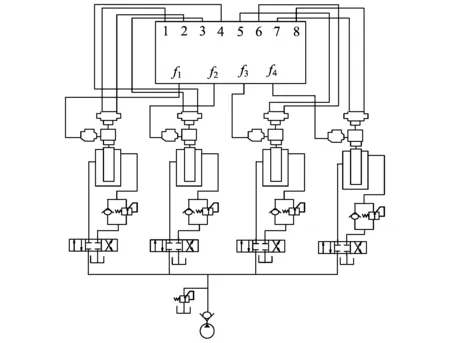
图3 机-液耦合仿真模型 Fig.3 Machine hydraulic coupling simulation model
3 耦合仿真结果分析
机-液耦合仿真模型建立后,在AMESim环境中,设置液压相关参数如表1所示。在ADAMS环境中设置仿真运行参数:仿真时间为20 s,步长为0.001。为了使仿真真实再现现场调绳情况,根据实际作业过程,设置钢丝绳在5 s时施加负载,即预紧力油缸完成夹绳,上调绳器上提;此时,忽略钢丝绳质量,锁绳装置上端载荷为零,钢丝绳下端仅作用罐笼和配重。设置负载为34 t,加载时间为0.5 s;在7.5 s时开始减小负载,8 s时负载变为零(如图4);同时预紧力油缸施加反向力,打开锁绳装置。运行仿真分析结果如图5-图8所示。
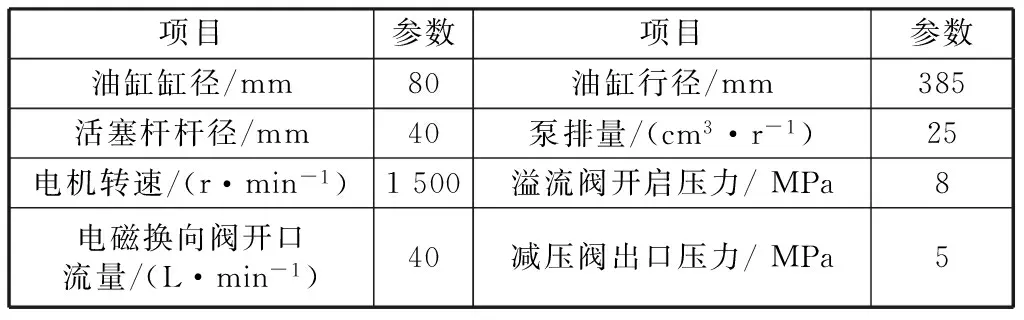
表1 仿真参数设置表
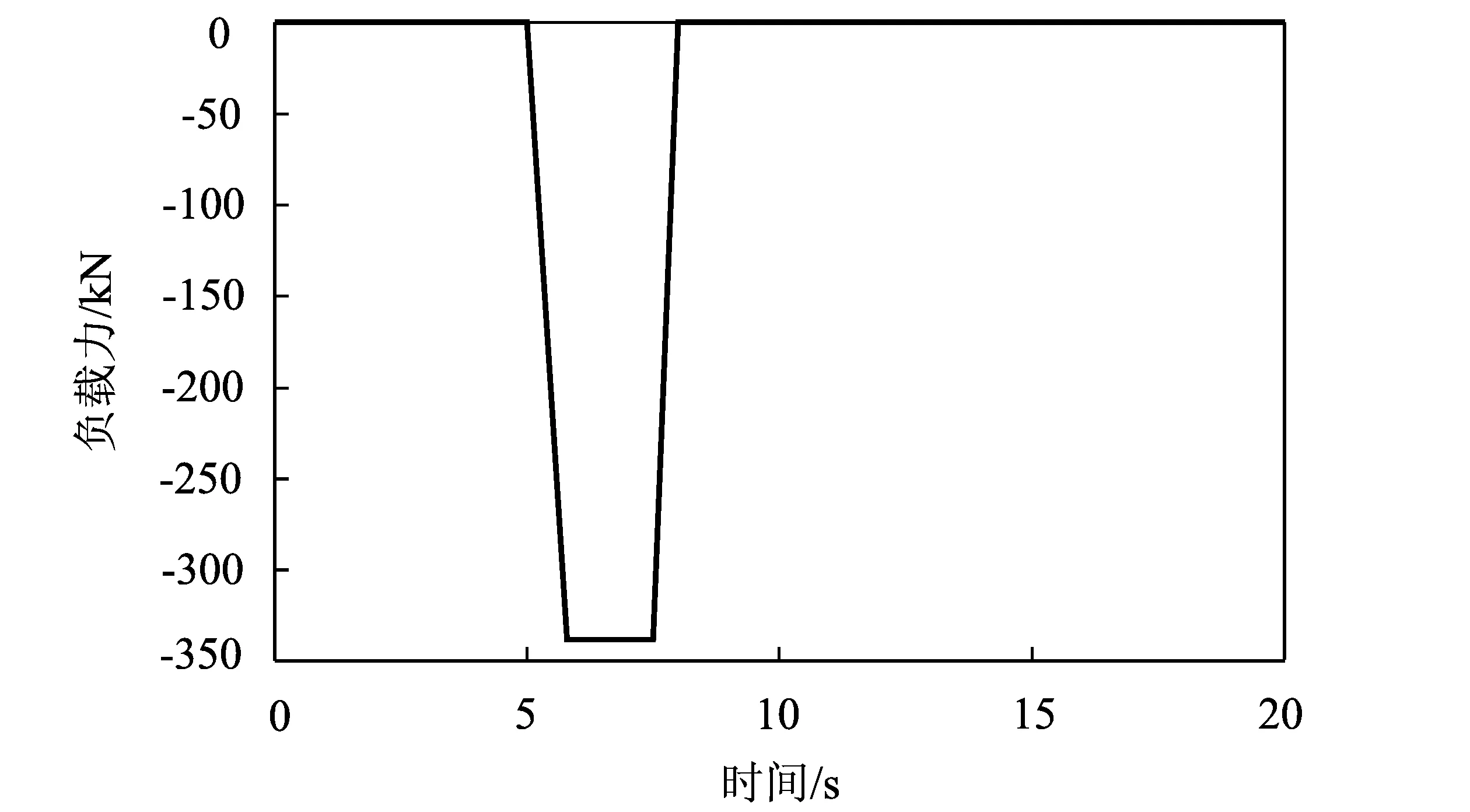
图4 负载作用曲线图Fig.4 Graph of load effect
根据表1参数设置,可以将仿真分为锁绳阶段(0~7.5 s)和松绳阶段(7.5~20 s)。
3.1 锁绳阶段
图5、图6所示,分别为预紧力油缸有杆腔和无杆腔压力曲线。系统压力为8 MPa,仿真开始,有杆腔迅速达到系统压力,并推动锁紧楔形块下移,初步夹紧钢丝绳,其后,压力恒定在系统压力;此时,无杆腔压力始终为零。
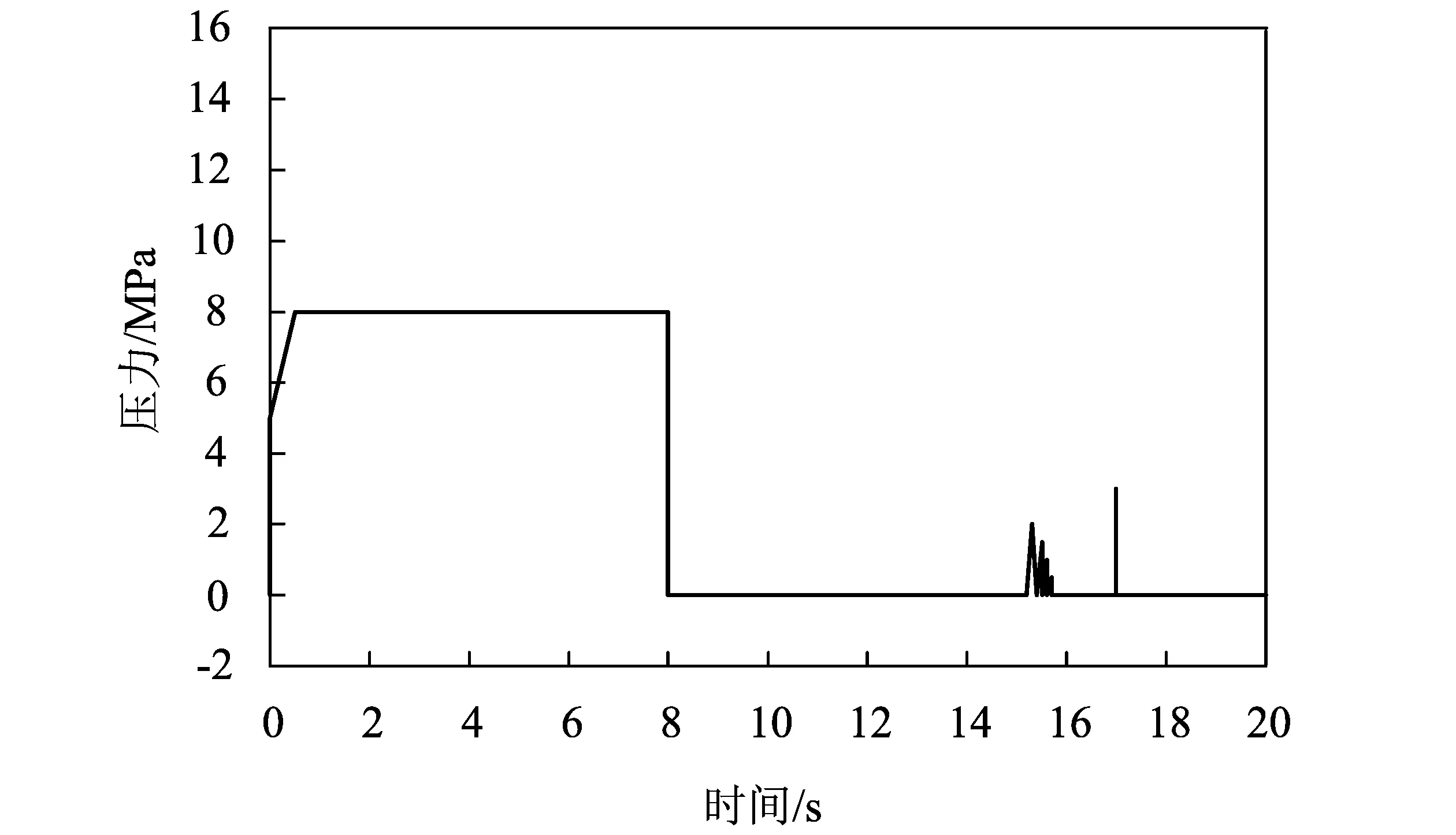
图5 预紧力油缸有杆腔压力曲线Fig.5 Pressure curve of hydraulic cylinder chamber with piston-rod
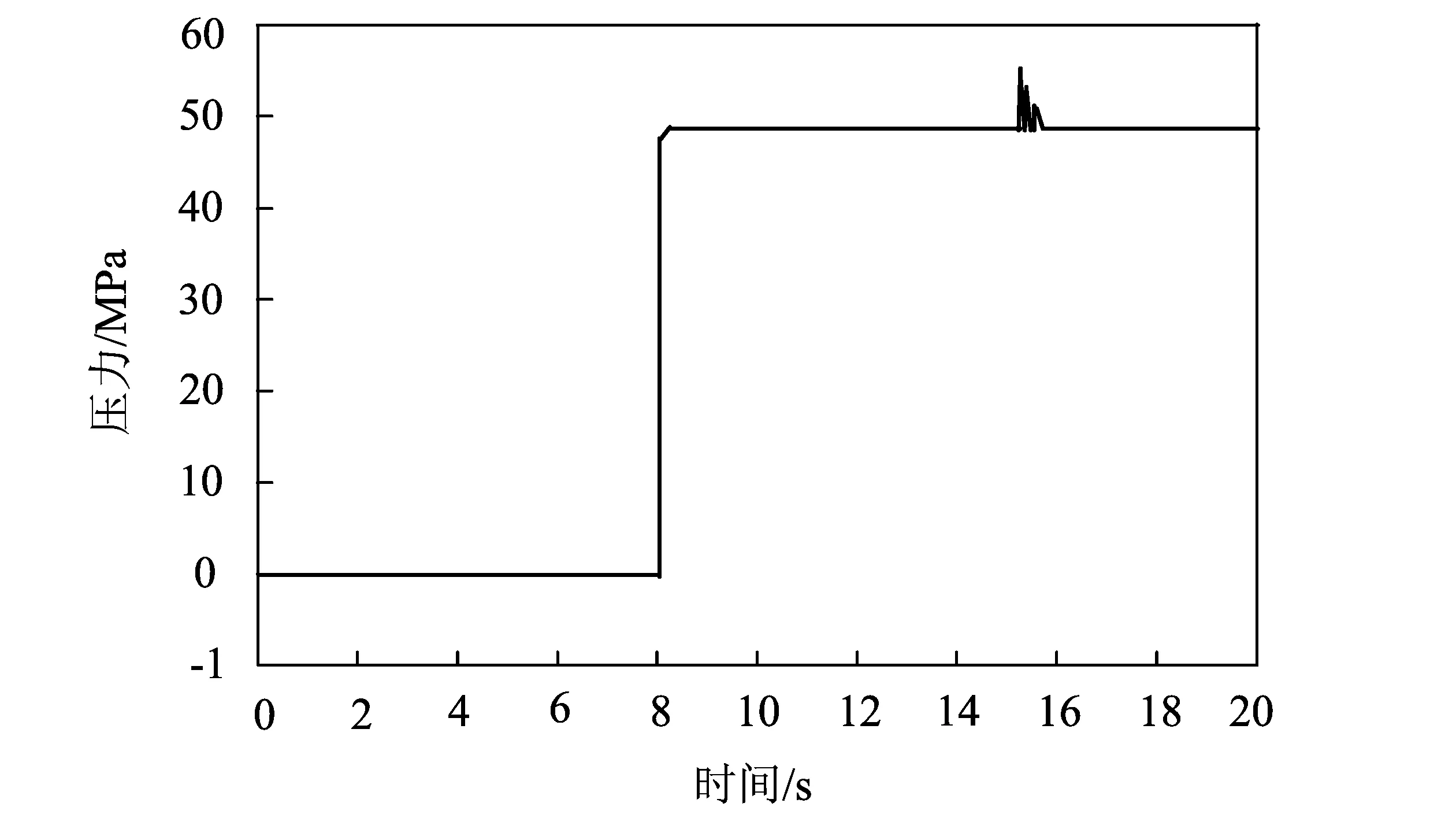
图6 预紧力油缸无杆腔压力曲线Fig.6 Pressure curve of hydraulic cylinder chamber without piston-rod
图7、图8所示分别为活塞杆位移曲线和锁紧楔形块位移曲线。由于活塞杆与楔形块是刚性连接在一起的,二者运动趋势完全一致。在0~5 s时,锁紧楔形块在预紧力油缸的作用下,向下移动约125 mm;5~5.5 s施加负载后,楔形块与钢丝绳同步向下移动;随着负载稳定在34 t,6.5 s时,楔形块停止移动,锁紧了钢丝绳。在负载作用下,楔形块(活塞杆)移动总位移为25 mm。
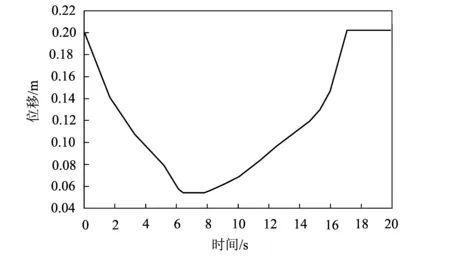
图7 活塞杆位移曲线Fig.7 Displacement curve of piston
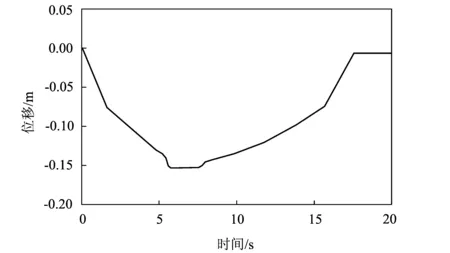
图8 楔形块位移曲线Fig.8 Displacement curve of wedge
3.2 松绳阶段
根据图5、图6所示有杆腔和无杆腔压力曲线可知,楔形块锁紧钢丝绳后,在8 s时换向阀换向,高压油经减压阀进入无杆腔,有杆腔压力降为0,无杆腔压力由于减压阀作用系统压力变为工作压力5 MPa,进入松绳阶段;15.3 s时,楔形块与钢丝绳分开,钢丝绳弹性伸缩,施加给楔形块震动的惯性力,导致油缸无杆腔压力出现震荡,随后又稳定下来;17 s时,油缸行程走完,系统压力稳定在 5 MPa。
图7、图8表示的活塞杆位移与楔形块位移在8 s时,预紧力油缸施加反向拉力,锁紧楔形块在外力作用下缓慢向上移动,松开钢丝绳;15.3 s时,楔形块与钢丝绳脱离,只受到与珠架结构间的滚动摩擦力作用,但该作用力较小,使得楔形块迅速上移;17 s时,活塞杆到达行程终了,维持在稳定值,最大行程不再改变。
综合仿真曲线和上述分析可知,锁绳装置在工作时,依靠油缸本身作用力楔形块下移初锁钢丝绳;其后,钢丝绳上加载负载作用力,由于负载力大于摩擦力,楔形块加速向下锁紧钢丝绳;随后,当摩擦力最终等于负载时,楔形块停止运动,钢丝绳被锁紧。相比锁绳过程,松绳则是一个缓慢的过程,负载为零,楔形块在油缸力的作用下缓慢上升,并最终松开钢丝绳。
4 实验结果分析
基于耦合仿真实验,搭建了调绳装置实验平台。在实验平台上用拉力油缸模拟负载,检查调绳系统中4组锁绳装置的锁绳与松绳的效果。
图9和图10是锁绳装置在预紧油缸为0 MPa和5 MPa作用下,楔形块的位移和相对位移曲线。由图9和图10可以看出:1#,2#,3#,4#共4组锁绳装置在预紧力油缸作用后,锁紧楔形块迅速锁紧钢丝绳,并随钢丝绳一起下移:起初,发生少许相对滑动,之后完全锁紧;随着载荷的不断加大,楔形块的位移也越来越大,在负载达到一定程度时,钢丝绳与锁紧楔形块之间没有相对滑动;锁绳装置在未施加预紧力(预紧力为0 MPa)时,依靠钢丝绳重力锁紧钢丝绳后,再施加负载。
实验表明,当载荷小于4 MPa时,绳与楔形块间相对位移较大;当载荷施加到5 MPa时,锁紧楔形块位移明显增大,相对位移变小,此时楔形块才慢慢锁紧钢丝绳;其后,楔形块位移趋势与施加预紧力的实验结果相似,楔形块与钢丝绳之间有轻微相对位移。综上分析,锁绳装置在施加预紧力后,锁绳效果更理想。
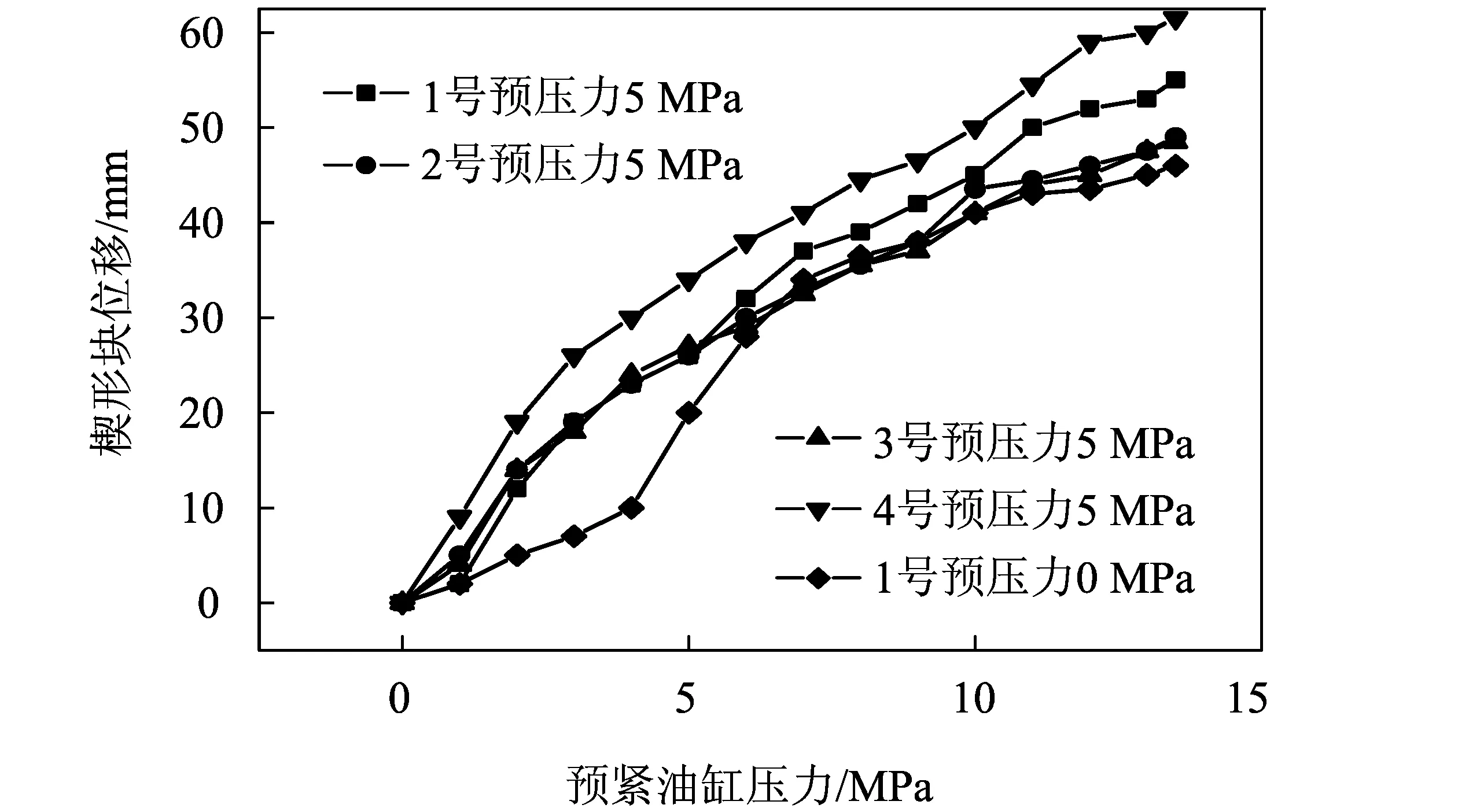
图9 楔形块位移曲线Fig.9 Displacement curve of wedge block
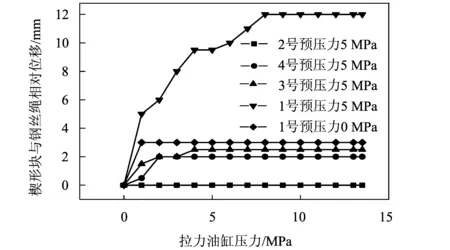
图10 楔形块相对位移曲线Fig.10 Relative displacement curve of wedge block
拉力实验结束后进行松绳实验,在预紧力油缸压力5 MPa作用下,锁绳装置楔形块有轻微移动,经多次切换换向阀,锁紧楔形块顺利打开。结果表明,实验结果与机液耦合仿真结果相吻合,锁绳装置能满足调绳装置的锁绳与松绳的要求。
5 结论
1) 利用AMESim与ADAMS建立了调绳器复杂系统联合仿真模型,与传统独立建模、独立仿真方法相比,模型与实际系统更加贴近。
2) 利用机-液联合仿真,设计者可以直观地检测产品的液压系统与机械结构的匹配性及系统的动态特性,提高设计成功率。
3) 联合仿真模型可用于调绳器系统方案设计、调绳器样机性能评估,也可用于调绳器系统优化的研究,为产品开发提供一种周期短、成本低的新方法。
[1] 武熙.多绳摩擦式提升机电液调绳打压机设计及应用[J].同煤科技,1996(4):11-13.
[2] 李进怀,袁守胜,程天标.多绳摩擦式提升机钢丝绳调绳技术探讨[J].中州煤炭,2012(9):39-442.
[3] 董孟娟,贾福音,姜小环,等. YT 型调绳装置的研究[J].煤矿机械,2008,29(7):157-158.
[4] 翟玉芳,贾福音.YHT 型摩擦提升系统装备调换装置的应用[J].煤矿机械,2013,34(4):211-212.
[5] 贾福音.摩擦提升滑绳溜车安全可靠制动分析[J].煤炭工程,2008(5):99-100.
[6] 肖兴明.摩擦提升重大故障分析及预防[M].徐州:中国矿业大学出版社,1994.
[7] 余在华,吴国琰.跳绳与安全制动[J].煤矿安全,1983(7):37-39.
[8] 李进怀,袁守胜,程天标. 多绳摩擦式提升机钢丝绳调绳技术探讨[J].中州煤炭,2012(9):39-40.
[9] 刘云楷,徐桂云,张晓光. 多绳摩擦式提升机钢丝绳张力在线监测系统[J].煤矿机械,2011(5):131-133.
[10] 李昕.JKD-Φ1750×6多绳摩擦式提升机钢丝绳张力不平衡的调绳方法[J].湖南有色金属,2014(1):57-59.
[11] 刘雷,李新平,葛云燕,等.多绳摩擦式提升机钢丝绳张力平衡分析[J].矿山机械,2008,15:66-68.
[12] 田志俊.多绳摩擦式提升机主轴装置动力学分析[D].秦皇岛:燕山大学,2012.
[13] 张华,宋保文.多绳摩擦式提升机钢丝绳张力在线监测研究[J].长治学院学报,2013(2):56-58.
[14] 郭勇,彭勇,过新华,等.运用ADAMS和AMESim联合仿真的LUDV液压系统动态特性分析[J].现代制造工程,2010(7):30-34.
[15] 高杰.多绳摩擦式提升机张力平衡装置优化分析研究[D].太原:太原科技大学,2011.
[16] 张俊,寇保福,寇子明,等.基于AMESim的液压调绳装置同步系统的研究与仿真[J].矿山机械,2013(5):48-52.
[17] 秦强.基于动力学的煤矿立井摩擦提升系统安全性研究[D].合肥:合肥工业大学,2008.
[18] 刘利明,傅连东,黄智武,等.基于AMESIM的多孔形缓冲套的仿真与研究[J].机械设计与制造,2011(6):214-216.
[19] 刘海丽.基于AMESim的液压系统建模与仿真技术研究[D].西安:西北工业大学,2006.
[20] 寇保福.重载深井调绳系统研究[D].太原:太原理工大学,2011.
(编辑:庞富祥)
Analysis of Dynamic Characteristic of Rope Adjusting Device Based on ADAMS and AMESim Co-simulation
LI Junxia1,2,HE Yuehua3
(1.CollegeofMechanicalEngineering,TaiyuanUniversityofTechnology,Taiyuan030024,China; 2.ShanxiProvincalEngineeringLaboratoryforMineFluidControl,Taiyuan030024,China; 3.XuzhouConstructionMachineryGroupCo.,Ltd.,Xuzhou221004,China)
In order to analyze complex hydraulic-mechanical coupling system of rope adjusting device, the evaluation on digital virtual prototype was proposed.Hydraulic-mechanical simulation model was established by integrating the hydraulic system model and mechanical model of rope adjusting device, via software interfaces between ADAMS and AMESim,and the dynamic characteristics of the device were analyzed. The co-simulation model can be used to design the system,evaluate the performance and optimize the system to develop rope adjusting device. It provides a short development cycle and low-cost method to develop production.
rope adjusting device;hydraulic-mechanical;dynamic characteristics
1007-9432(2016)03-0304-05
2015-10-26
教育部新世纪优秀人才支持计划基金资助项目(NCET-12-1038);山西省科技攻关基金资助项目:带式输送机断带抓捕装置设计与研究(2015031006-2)
李军霞(1976-),女,河南许昌人,博士,教授,主要从事机电液一体化研究,(E-mail)bstljx@163.com
TH122
A
10.16355/j.cnki.issn1007-9432tyut.2016.03.006
