BDS+GPS双系统多频RTK算法研究
2016-12-15袁宏超秘金钟徐彦田谷守周祝会忠
袁宏超,秘金钟,徐彦田,谷守周,祝会忠
(1. 屈家岭管理区城乡建设管理局,湖北 荆门 431821; 2. 中国测绘科学研究院,北京 100830;3. 辽宁工程技术大学测绘与地理科学学院,辽宁 阜新 123000)
BDS+GPS双系统多频RTK算法研究
袁宏超1,2,3,秘金钟2,徐彦田2,谷守周2,祝会忠3
(1. 屈家岭管理区城乡建设管理局,湖北 荆门 431821; 2. 中国测绘科学研究院,北京 100830;3. 辽宁工程技术大学测绘与地理科学学院,辽宁 阜新 123000)
目前北斗卫星导航系统(BDS)已建成区域导航星座,并具备了覆盖亚太地区的导航定位服务能力。作为全球第一个全星座播发三频卫星导航信号的卫星系统,北斗三频RTK定位性能进入实测验证阶段,而且BDS+GPS双系统多频RTK定位算法也待进行算法验证。本文基于非组合RTK定位模型,采用Kalman滤波算法,并根据在成都实测的BDS三频与GPS双频数据,对各种定位模式下的定位性能进行分析和比较。结果表明,该算法可以兼容不同解算系统和不同频率组合的要求,可以实现多频多系统RTK定位。双系统联合定位精度要高于各个单系统定位。在卫星几何构型较好的情况下,三频定位精度相对于双频短距离RTK定位精度的改善有限,其中BDS单频与GPS单频精度最高。在卫星几何构型较差的情况下,频率的增加可以提高RTK作业的可能性。
北斗卫星导航系统;三频;RTK;联合定位;多频
北斗卫星导航系统(BDS)是我国自主研制开发的、具有自主知识产权的卫星导航定位系统,是继美国的GPS、俄罗斯的GLONASS之后,国际上可定位的第3个卫星导航系统。目前,北斗卫星导航系统已开始向亚太地区正式提供连续无源定位、导航、授时等服务[1]。单星座定位存在一些不足,如可见卫星有限、稳定性不强等,因此多频多系统导航定位研究成为导航定位的一个新的热点。采用多频多系统组合定位,将会使卫星数目成倍增加,有利于增强卫星几何图形强度,提高定位精度及稳定性[2]。同时多频多系统的发展,对不同系统和不同频率的定位模型的兼容性和扩展性问题也提出了挑战[3],本文基于非组合算法很好兼容了不同频率和不同系统的定位解算。
一、数学模型
1. GPS与BDS定位的时空基准统一
在组合导航定位中接收机需要接收不同卫星星座的导航信息,由于各系统之间存在着一定的系统偏差,因此在进行多模组合导航定位中需要考虑时空统一的问题[2,4-5]。
BDS与GPS采用的时间基准不同。BDS采用的是时间基准是北斗时(BeiDou Navigation Satellite System Time,BDT)。GPS采用的时间基准是GPS时间(GPST Time,GPST)。北斗起算时间是2006年1月1日00:00:00,GPS起算时间是1980年1月6日00:00:00,而且两个时间系统都无闰秒。起算时间不一致,需要将时间都转换到GPST使得时间基准得到统一。
虽然BDS采用了CGCS2000坐标系,GPS采用了WGS-84坐标系,但是这两个坐标系统的坐标原点、定向一致,由两个坐标系的参考椭球的扁率差异引起同一点在CGCS2000坐标系和WGS-84坐标系内的坐标变化,对于短基线的影响,在本次试验忽略不计,近似认为属于同一参考框架。
2. GPS+BDS非组合RTK解算模型
双差观测值具有可消除接收机钟差和卫星钟差,大大削弱卫星星历误差、电离层延迟误差、对流层延迟误差等误差影响的优点,而且双差模糊度具有整数特性[6-7]。因此,本文采用非组合双差观测值进行双系统的RTK解算。双系统非组合相对定位的双差观测方程为
(1)
(2)
(3)
(4)
3. 附有模糊度参数的卡尔曼滤波模型
利用式(1)—式(4)双差观测方程构造离散系统卡尔曼滤波的状态方程和观测方程
Xk=Φk,k-1Xk-1+Wk-1
(5)
Lk=HkXk+Vk
(6)
式中,k-1、k分别表示第k-1时刻和第k时刻;Φk,k-1为状态转移矩阵;L为观测值向量;H表示系数矩阵;X表示状态向量;W表示动态噪声向量;V表示观测噪声向量。其中,状态向量X为

(7)

式(7)状态向量中位置参数初始值可采用单点定位的结果。单差模糊度的初始值可由单差相位观测值和单差伪距观测值得到,对应的标准差设为30周。
卡尔曼滤波是一种递归估计,仅需知道上一时刻的状态估计值及其协方差和当前时刻的观测值就可计算得到当前时刻状态估计值,而不需要记录历史信息。因此,可以利用位置均值的自适应算法[8-9]给出状态方程及预测值的方差阵
(8)
(9)

根据卡尔曼滤波模型计算增益矩阵
(10)

(11)
Pk/k=(I-KkHk)Pk/k-1
(12)
通过滤波得到双差模糊度的浮点解及方差阵协方差矩阵后,采用整数最小二乘降相关分解法(LMABDA)解算双差整周模糊度值[10-11]。LAMABDA方法采用最小二乘估计,目标函数为
(13)

(14)

二、BDS三频与GPS双频实测数据的算例试验与分析
1. BDS三频与GPS双频数据测试
本文采用的数据是利用Trimble Net R9多频接收机在四川省采集的一条13.5 km的基线数据。利用四川省成都GPS+BDS双系统连续运行参考站作为参考站。在距离参考站约13.5 km处架设测站,连续观测约2 h,观测时间为2015年8月7日,采样间隔为1 s,截至卫星高度角为15°。
图1表示在观测时段内基准站和流动站各系统的共视卫星的数目。图2表示在观测时段内各系统的PDOP值变化。目前北斗系统在轨运行的GEO卫星和IGSO卫星较多,因此在该时段观测的卫星数量较稳定,最多10颗卫星,最少9颗卫星,PDOP值变化也在2~3之间。GPS卫星数量变化比较大,卫星数量为5~8颗。在观测时段08:50至09:20之间,GPS观测数据质量较差,部分卫星L1或L2观测值没有导致共视卫星较少。其PDOP在相应的时段也出现了较大的变化。
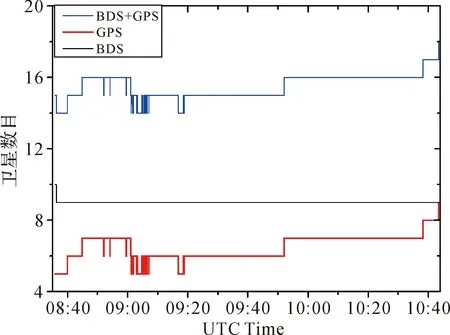
图1 卫星数目变化
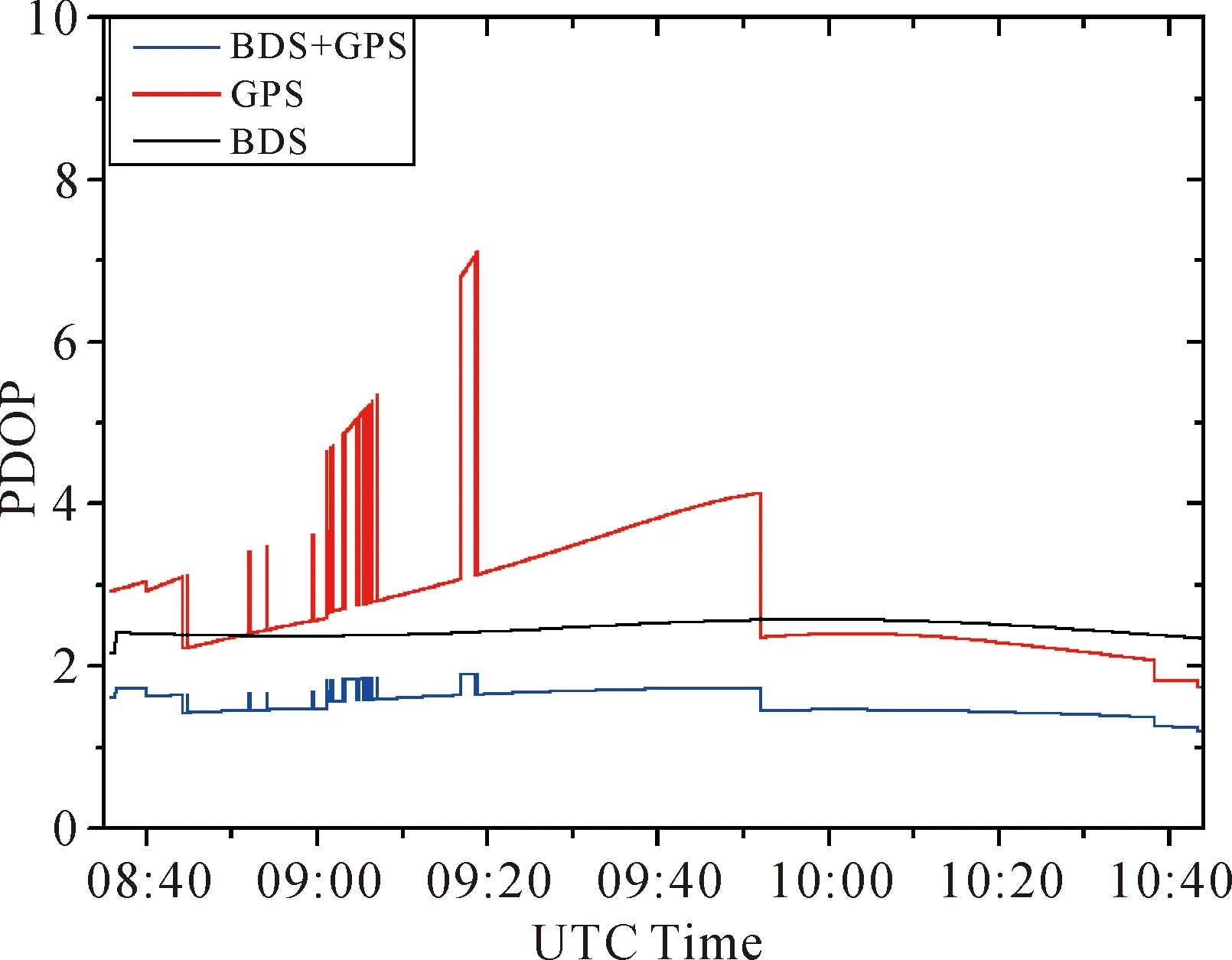
图2 PDOP值
图3—图5分别表示各系统RTK定位误差序列。各个系统初始化时间都为1 s。从图中可知双系统联合定位的结果要优于各个单系统定位结果。BDS三频定位结果变化相对平缓,误差序列总体上都在-5~5 cm之间变化。GPS观测时段08:50至09:20之间定位结果变化较为剧烈,主要原因就是卫星数量的变化,但是大部分历元都在-5~5 cm之间变化。双系统所有定位结果都在-5~5 cm之间变化。双系统定位结果要优于各个单系统的定位精度,BDS三频定位结果和GPS双频定位结果相当。
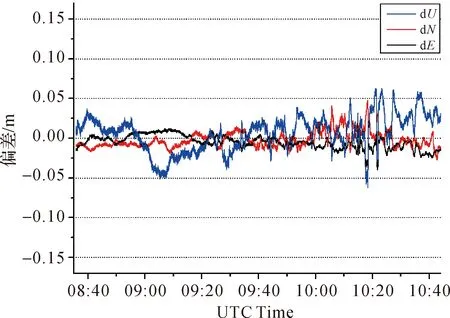
图3 BDS三频RTK误差序列
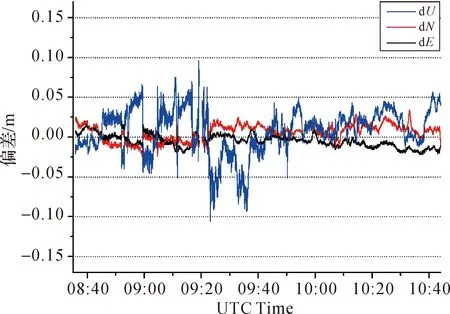
图4 GPS双频RTK误差序列
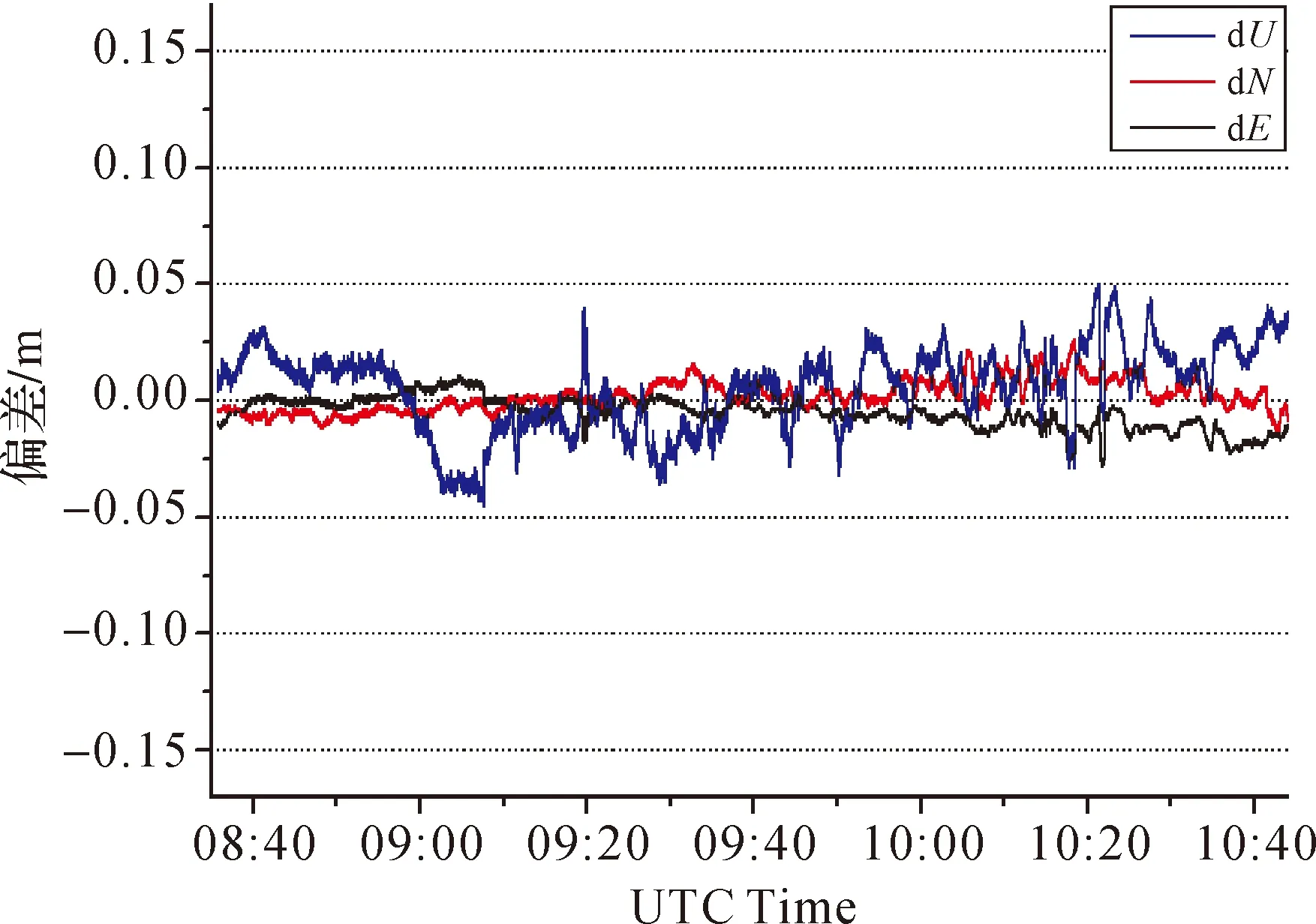
图5 BDS三频/GPS双频RTK误差序列
2. 各系统的定位精度和初始化数据统计
为了测试不同的系统,以及频率增加所带来的影响,本文测试BDS单频、BDS双频、BDS三频、GPS单频、GPS双频、BDS单频+GPS单频、BDS双频+GPS双频、BDS三频+GPS双频8种解算系统在该时段的初始化时间及定位结果,并分析了各种频率和各系统组合的解算结果。测试结果见表1、表2。
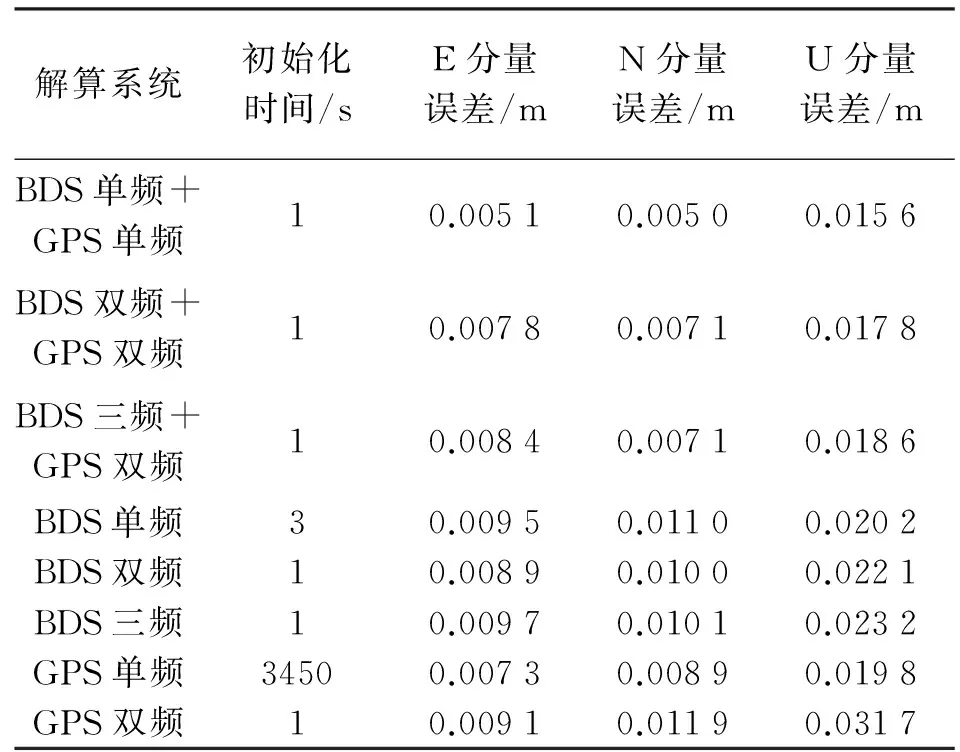
表1 初始化时间和解算误差RMS值
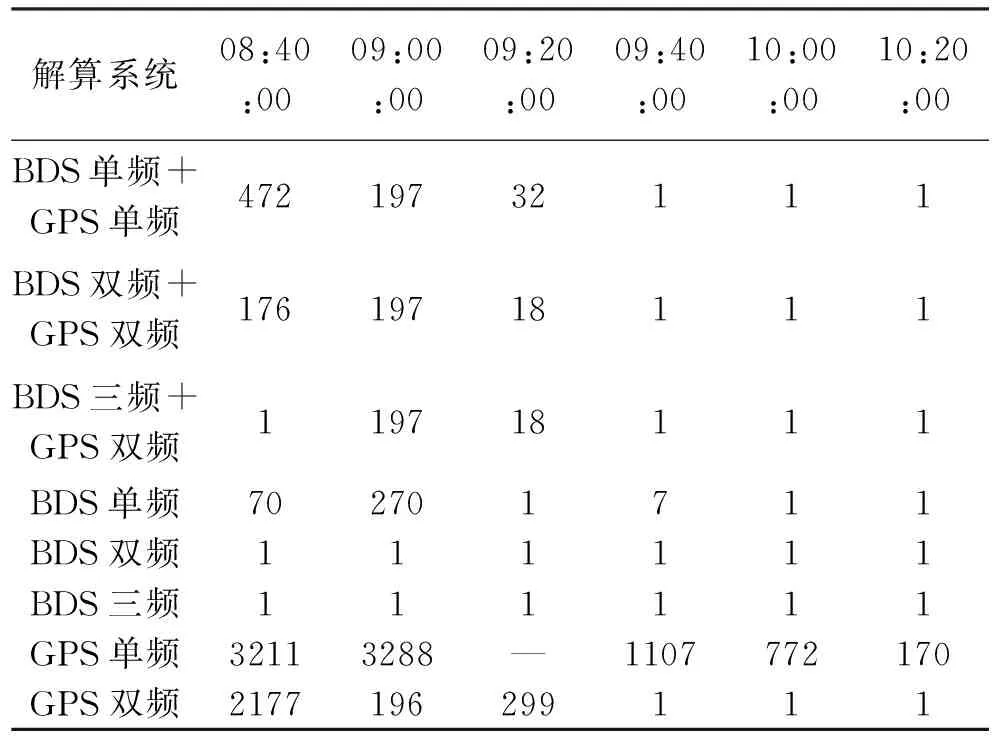
表2 不同时刻的初始化测试 s
表1统计各系统各频率组合在E、N、U方向上的RMS值。为了更加直观表示各系统和各频率组合对定位精度的影响,本文将各系统各频率位置精度统计如图6所示,其中BDS/GPS(三)表示BDS三频+GPS双频定位模式。从表1和图6中可知双系统定位结果要优于各个单系统解算结果。GPS单系统的解算结果和BDS单系统的解算结果相当,都可以达到厘米级的定位结果,满足RTK定位要求。GPS双频解算结果明显低于GPS单频解算结果,主要原因是GPS单频初始化时间,参与精度统计的固定解较少。对比GPS单系统的单频和双频可以发现:在卫星数量较少或卫星数据质量较差的情况下,多频的发展可以增强单系统可用性。对比BDS单频、BDS双频、BDS三频的解算结果可以发现:在卫星数量较多的情况下,对于常规RTK,随着频率的增加,所解算的RMS误差也增加。类似的情况也出现在双系统解算中,BDS单频+GPS单频解算的精度最高。这可能与各系统的第二个频率信号相对于第一个频率信号稳定性较差,以及与各系统相对于B1和L1频率相比,频率较小的B2、B3与L2频率所受到双差电离层延迟影响可能更大有关。
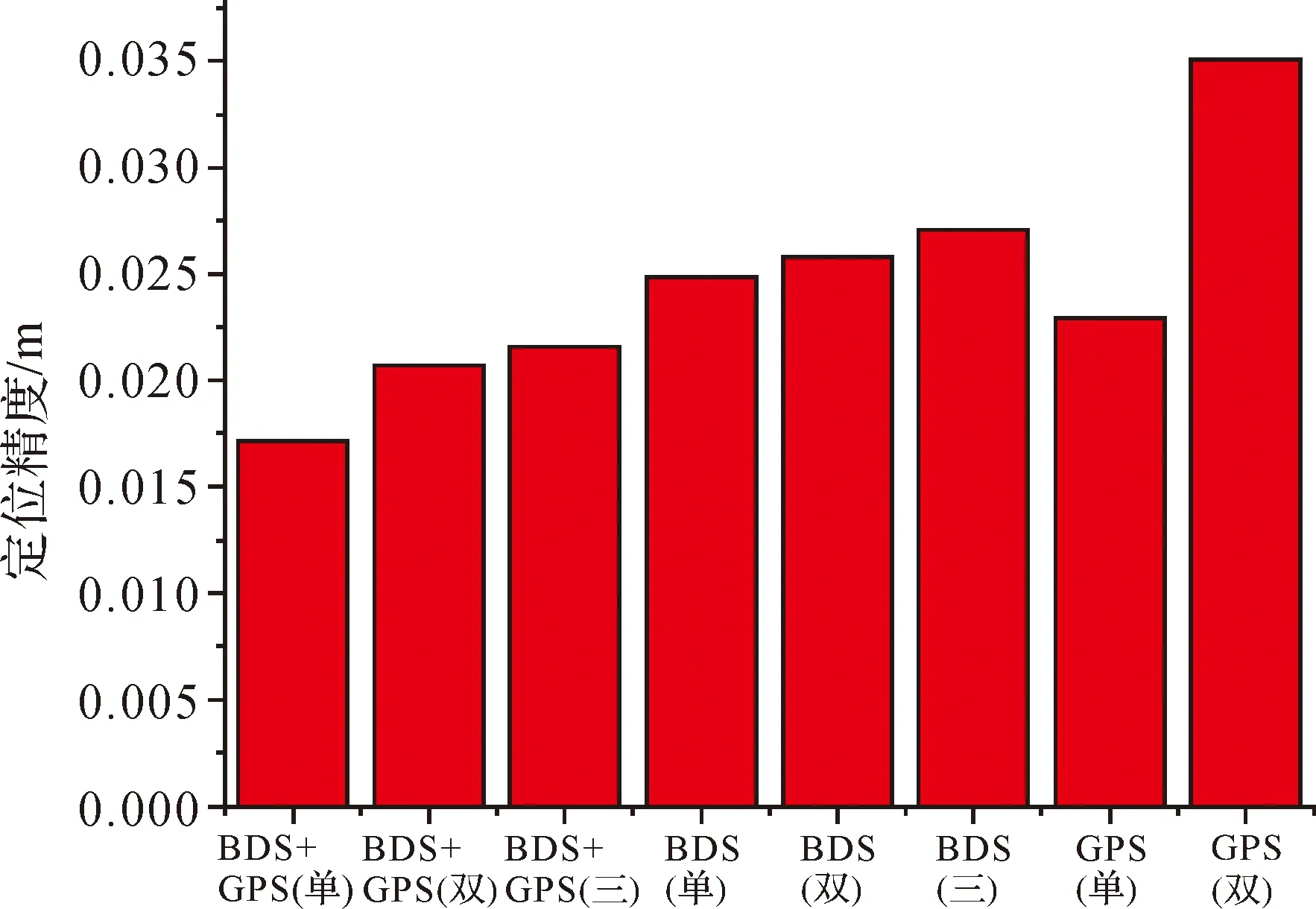
图6 各系统各频率位置精度统计结果
为了测试RTK定位初始化性能,本文在观测时段中08:40:00、09:00:00、09:20:00、09:40:00、10:00:00、10:20:00六个节点上进行了初始化测试。
表2中,—表示模糊度固定错误。从表2可以看出,各系统单频相对于各系统的双频、三频初始化时间很长,可靠性较低。GPS单频平均初始化时间为1710 s,主要原因是GPS在08:40:00至09:00:00观测时段数据质量较差,GPS双频初始化平均所需时长为446 s,主要也是受到该时段的影响。双系统在该时段的测试,随着频率的增加,大大缩短了初始化时间,BDS三频+GPS双频效果最好,平均初始化时间为37 s。在09:40:00至10:20:00观测时刻的GPS卫星数量增加,GPS双频相对于GPS单频初始化时间大大减少。在整个观测时段,北斗卫星一直很稳定,几何构型较好,初始化很快。
三、结束语
随着北斗系统的发展,多频多系统成为研究热点。多频多系统的发展对定位模型兼容性等提出了要求。本文基于非组合RTK定位模型兼容了不同解算系统和不同频率组合的要求,并测试出了各种组合后的结果。多频多系统的发展增强了短距离RTK解算的稳定性,大大缩短了初始化时间。特别是在卫星几何构型较差的情况下,频率的增加可以提高RTK作业的可能性。频率的增加对于中长距离的RTK电离层延迟的快速分离提供了一种可能性,因此多频多系统中长距离RTK解算也会成为未来一个热点。
[1] 杨元喜,李金龙,王爱兵,等.北斗区域卫星导航系统基本导航定位性能[J].中国科学,2014,44(1):72-81.
[2] 张小红,丁乐乐,何俊.双卫星导航系统短基线动态定位实验与对比分析[J].导航定位学报,2014,2(2):26-30.
[3] 李金龙.北斗/GPS多频实时精密定位理论与算法 [D].郑州:信息工程大学,2014.
[4] 高星伟,李毓麟,葛茂荣.GPS/GLONASS 相位差分的数据处理方法[J].测绘科学,2004,29(2):22-24.
[5] 高星伟,过静珺,程鹏飞,等.基于时空系统统一的北斗与GPS融合定位[J].测绘学报,2012,41(5):744-748.
[6] 魏子卿,葛茂荣.GPS相对定位的数学模型[M].北京:测绘出版社,1988:93-94.
[7] 祝会忠,高星伟,秘金钟,等.一种GPS整周模糊度单历元解算方法[J].测绘科学,2011,36(4):9-11.
[8] 崔希璋,於宗俦,陶本藻,等.广义测量平差[M].武汉:武汉大学出版社,2012:136-150.
[9] 高为广,杨元喜,张双成.基于当前加速度模型的抗差自适应Kalman滤波[J].测绘学报,2006,35(1):15-18.
[10] TEUNISSEN P J G.A Canonical Theory for Short GPS Baselines Part I:The Baseline Precision[J].Journal of Geodesy,1997(71):320-336.
[11] TEUNISSEN P J G.A Canonical Theory for Short GPS Baselines Part II:the Ambiguity Precision and Correlation[J].Journal of Geodesy,1997(71):389-400.
ResearchonMulti-frequencyRTKAlgorithmforBDS+GPSDualSystem
YUAN Hongchao,BEI Jinzhong,XU Yantian,GU Shouzhou,ZHU Huizhong
袁宏超,秘金钟,徐彦田,等.BDS+GPS双系统多频RTK算法研究[J].测绘通报,2016(9):5-8.
10.13474/j.cnki.11-2246.2016.0280.
P228
B
0494-0911(2016)09-0005-04
2015-11-23
科技部科技支撑计划(2012BAB16B01);科技部863计划(2013AA122501;2015AA124001);北斗分析中心(GFZX0301040308-06);国家自然科学基金(41304030;41504010); 四川测绘地理信息局科技支撑项目(J2014ZC01;J2015ZC01);中国测绘科学研究院基本科研业务费(7771503)
袁宏超(1988—),男,硕士,研究方向为GNSS高精度定位算法研究。E-mail:hongce0717@163.com