一种兼容GPS和BD系统的跟踪环路相干积分方法
2016-12-15朱龙泉李荣冰高关根韩志凤刘建业
朱龙泉,李荣冰,高关根,韩志凤,刘建业
(1.南京航空航天大学自动化学院导航研究中心,南京210016;2.西安飞行自动控制研究所,西安710065)
一种兼容GPS和BD系统的跟踪环路相干积分方法
朱龙泉1,李荣冰1,高关根2,韩志凤1,刘建业1
(1.南京航空航天大学自动化学院导航研究中心,南京210016;2.西安飞行自动控制研究所,西安710065)
在城市峡谷等复杂环境下,卫星导航信号衰减严重,接收机导航定位性能变差,甚至是不能工作,给国民生产生活带来诸多不便。提高接收机弱信号的跟踪能力,研究高性能的卫星导航接收机具有重要的意义和价值。在研究分析GPS、北斗D1导航电文的调制方式和相干积分方法的基础上,构建了一种改进直方图的位同步方法,该方法借鉴直方图的思想,通过设定比特跳变的统计门限上限和多组门限下限找到比特跳变边沿。在此基础上设计实现了一种长时间相干积分方法,该方法兼容GPS电文和北斗D1导航电文,可以有效地消除导航电文跳变或者NH码跳变带来的比特翻转。最后,在FPGA平台验证了该方法可以有效提高信号信噪比,以及接收机在弱信号环境下的跟踪能力。
弱信号;位同步;相干积分;FPGA;信噪比
0 引言
卫星导航在国民经济建设、国防安全建设以及社会发展等各个领域都起到重大作用,卫星导航产业已成为全球性的高新技术型朝阳产业。随着需求激增和导航产业进入快车道发展,传统单一的导航接收机已不能满足人们的需求。目前,导航接收机正在向导航一体化、高精度高灵敏度、室内室外无缝连接、低功耗低成本等方向发展。
在山川峡谷、森林等类似复杂环境时,GNSS信号衰减严重[1],传统的民用GNSS接收机难以持续提供定位定速服务。针对这种弱信号环境下的接收机跟踪技术进行研究,具有十分重要的意义和广阔的前景。
1 GNSS信号跟踪环路分析
1.1 GNSS信号跟踪环路基本结构
捕获阶段得到信号的粗略相位和频率后,并不足以完整地剥离载波和码提取有效的导航信息,跟踪环路从捕获结果出发进一步精确跟踪接收信号的相位和频率信息,使得产生的本地复制信号始终与其保持一致[2]。跟踪环路基本结构如图1所示。
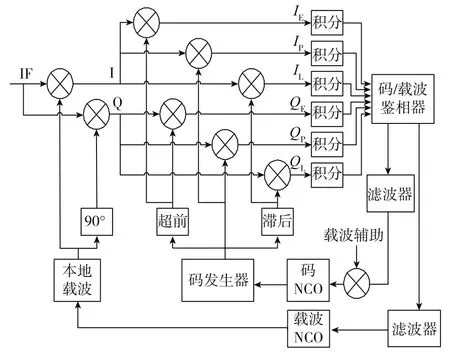
图1 GNSS信号跟踪环路基本结构Fig.1 Structure of GNSS signal tracking loop
锁相环采用窄噪声带宽,能够精确跟踪信号的相位和频率,但是对动态应力容忍性比较差。而锁频环采用宽噪声带宽,动态性能比较好,能更好地容忍载体的动态性等干扰,缺点是跟踪精度相对较低[3]。所以,结合锁频环和锁相环二者的优势,载波环路采用锁频环辅助锁相环的方式。跟踪环路主要由预检积分、鉴别器、滤波器和振荡器NCO构成。当鉴相器鉴别出输入信号和本地信号存在相位差异时,相位差经过滤波后反馈控制调节本地NCO输出频率,从而使得本地信号和接收信号始终保持一致。
当载体处于室外等信号较强的环境时,短时间的相干积分可以分离信号和噪声,环路能够稳定跟踪接收到的信号。当用户处于复杂环境时,信号强度衰减严重,短时间的相干积分不足以使得信号的能量高于噪声的能量,此时环路会出现失锁现象。所以在弱信号的环境下,需要加长相干积分时间,提高环路跟踪精度和弱信号的跟踪能力。
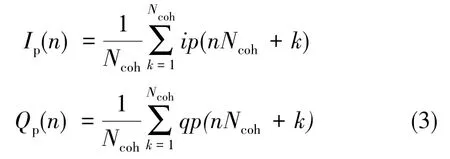
GPS电文速率是50bit/s,在20ms以内电文电平不发生跳变,可以采用导航电文组合的方法加长相干积分时间。虽然北斗D1导航电文速率也是50bit/s,但是D1电文存在二次编码即NH(Neumann⁃Hoffman)编码,二次编码具有提高信号抗窄带干扰能力、加快位同步等优势,其编码调制方式如图2所示。扩频码周期为1ms,NH[4]码(0000_0100_1101_0100_1110)码元宽为1ms,周期为20ms,与扩频码同步调制。在剥离NH码之前,1ms积分电文数据电平时刻存在跳变,直接用导航电文组合加长相干积分时间无法消除比特跳变带来的影响,积分幅值严重衰减,甚至导致环路失锁。所以,为了消除比特跳变对长时间相干积分的影响,必须先找到比特边沿剥离NH码,再加长积分时间。

图2 北斗二次编码示意图Fig.2 BeiDou second encoding scheme
1.2 相干积分基本原理
图1所示的载波跟踪环路中,积分清除器发挥着类似低通滤波器的功能,通过积分和滤波消除输入信号中的噪声和高频成分,这里积分是将I/Q轴信号分开而非混合,所以称为相干积分,对应积分时间Tcoh称为预检相干积分时间。
假定输入信号为连续时间型的,积分时间为t到t+Tcoh,则积分结果为:

其中假设:
1)数据电平D(t)在积分时间内不发生跳变;
2)本地复制信号与接收信号完全对齐,所得相关结果最大,忽略自相关幅值;
3)相干积分时间Tcoh对于I路输入信号中的高频成分来说足够长,于是高频成分可以被积分器滤除。
同样,可以对Q路输入信号进行积分:

同理,对离散信号可以推导积分结果表达式:
其中,Ncoh为相干积分时间Tcoh内输入到I/Q支路的相关积分结果个数,典型的预检积分时间为1ms,此时Ncoh与积分时间Tcoh相等。
Ncoh个相关结果ip累加使得积分结果I路幅值增加Ncoh倍,对应信号功率增加倍[5],而Q路均值为0的高斯白噪声经过积分累加后,噪声功率或者说方差只线性增加了Ncoh倍,所以相干积分后的增益为:

如果相关运算为一个码周期即1ms,相干积分时间为Tcoh,则增益也可以表示为:

2 基于FPGA的相干积分方法研究与设计
2.1 一种改进直方图的位同步方法
不论是GPS导航电文还是调制有NH码的北斗电文,只要知道比特跳变边沿则可以消除比特跳变对相干积分的影响[6],加长相干积分时间,提高信噪比,接着可以实现帧同步,解调出导航电文。
直方图是一种常见的位同步方法[7],基本原理是统计第k个积分结果到第k+1个积分结果符号跳变的次数,如果统计结果超过设定门限值,则认为k到k+1是比特跳变的边沿。在T秒内的统计数据里面,共有20ms宽的数据比特50T个,假设比特跳变的概率是0.5,则T秒内平均跳变次数为25T,如果将二进制的电文数据视为贝努力实验,统计结果呈二项分布。
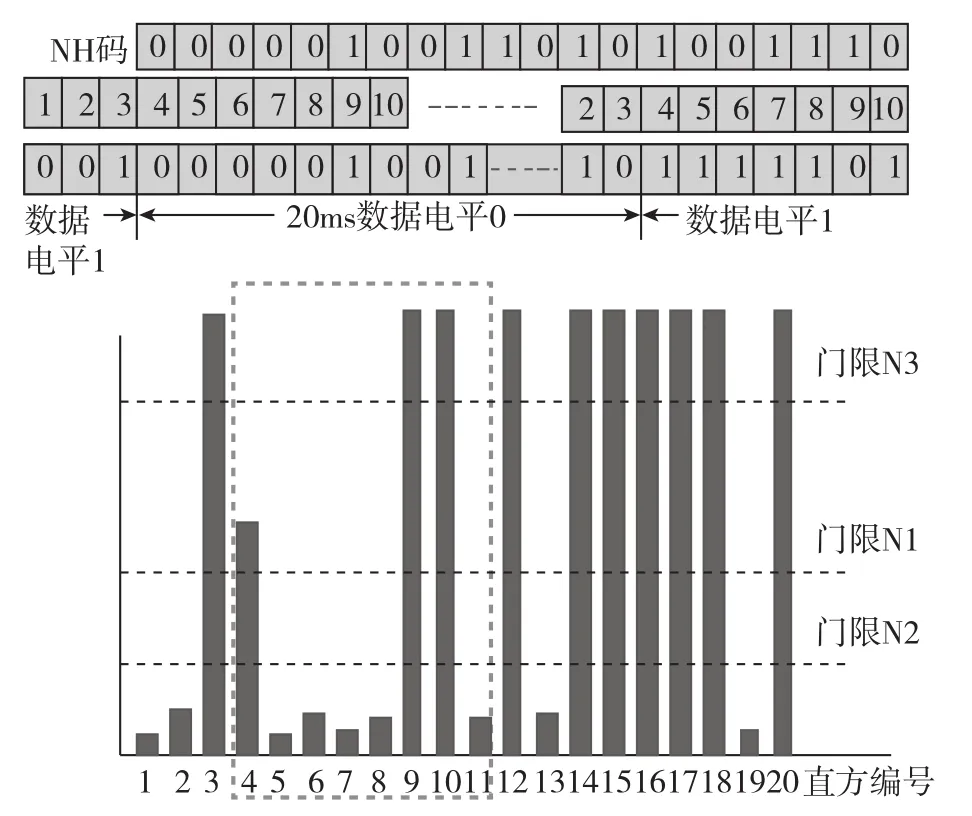
图3 直方统计结果Fig.3 Histogram statistical results
北斗D1电文直方统计结果如图3所示,门限N1是统计导航电文跳变位,对于T秒的统计数据N1可设置为25T;门限N3是统计由NH码调制引起的跳变,对于T秒的统计数据N3可设置为50T;门限N2是统计由NH码调制引起的不跳变,对于T秒的统计数据可设置为0。分析NH码的码元和上述直方统计结果可以知道,NH码前5个码元不存在跳变,对应上述直方5到直方8的统计结果;NH码第5与第6、第6与第7码片之间一定存在跳变,对应上述直方9和直方10;第7与第8码片之间一定不存在跳变,对应上述直方11。如果直方统计结果出现图3所示虚线框区域内的直方统计结果,则找到D1电文比特边沿即实现位同步。
结合直方图的思想和FPGA并行处理的特点,设计一种基于FPGA平台的改进直方图的位同步方法,该方法主要包括两个步骤:
1)构造如图4所示深度60宽度20的移位寄存器用于缓存1.2s的相干积分结果。考虑到弱信号条件下误码率变大,可以增加深度缓存更多的数据,以提高检测概率。输入数据是1ms的相干积分结果,移位使能时钟是1ms时钟信号。
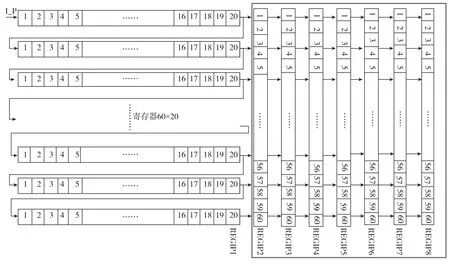
图4 移位寄存器Fig.4 Shift register structure
2)统计REGIP1~REGIP8依次两两相关的结果。如果统计结果出现如图3所示的直方统计结果,则REGIP1~REGIP2处即是比特跳变边沿。考虑到比特错误率,这里N1门限上限可适当增加到35,门限N3可适当下降到58,门限N2可增加到3。
此方法是在直方图方法的基础上进行改进,不但设定跳变统计结果的上限,同时设定多个统计结果的下限,大大提高了检测概率,降低错判的概率。并且针对不同强度的信号可以动态调节各自门限值。同时此方法兼容GPS导航系统,对于GPS导航电文只需要N1门限即可。
针对此方法在Modelsim上仿真结果如图5所示。输入信号是北斗1ms积分数据电文的符号位,从图5可以得到,直方统计结果依次出现31_0_ 0_0_0_60_60_0时与图3直方统计结果完全相同,此时位同步信号置位,比特计数从1~20循环计数,标示当前1ms积分结果在当前位的位置,位同步是周期20ms的脉冲波。为了加快仿真时间,图5中用微秒代替毫秒单位进行仿真。

图5 改进直方图位同步方法仿真结果Fig.5 Simulation result of modified histogram bit sync method
2.2 导航电文组合法相干积分
积分器相当于低通滤波器的功效,为了提高滤波效果和环路跟踪精度、弱信号跟踪能力,我们期望积分器的带宽要窄即积分时间尽量长,积分时间Tcoh加长后环路数据更新率降低,计算量也相应变小。同时考虑到载体动态性,积分时间Tcoh不能无限增长[8]。
实现比特同步之后进行相干积分设计,其基本设计思想如图6所示。缓存20个1ms相干积分结果P1~P20,其中P1是当前1ms相干积分的结果。比特同步后根据比特同步计数值,可以知道当前20ms数据可能存在比特跳变的位置,如当前P1处于比特计数的第20位,则当前P1~P20处于同一比特,剥离NH码后直接累加积分即可;如P1处于比特计数值的第1位,则P1属于当前比特的第一位,P2~P20属于前一比特后19位,分别剥离NH码之后采用先猜后验的方式进行积分;如P1处于比特计数值的第2位,则P1、P2属于当前比特的前2位,P3~P20属于前一比特后18位,分别剥离NH码之后采用先猜后验的方式进行积分,以此类推。下面以5ms和20ms积分时间为例在Modelsim上进行仿真。
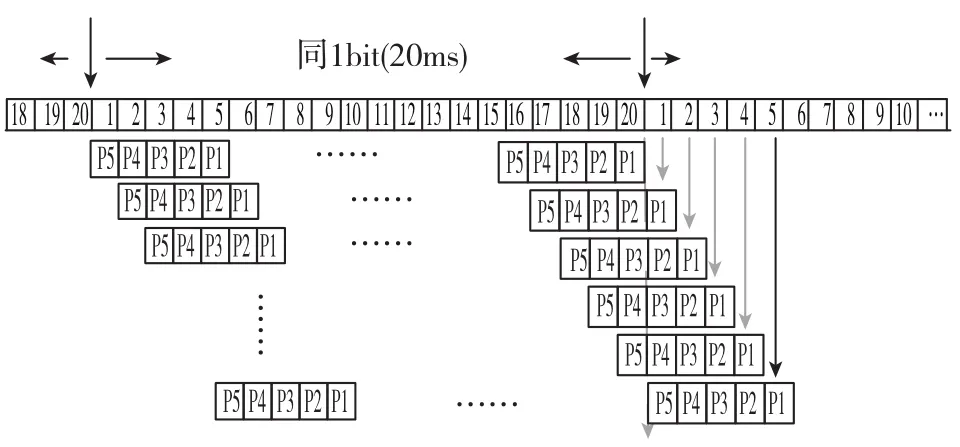
图6 导航电文组合法相干积分结构图Fig.6 Navigation message combined coherent integration method
图7所示为在Modelsim平台对5ms和20ms相干积分的仿真结果。从图7中可以看出,比特同步之后,无论从何处开始加长积分时间,其I路积分幅值都是线性增加的。此方法的优点是兼容GPS和北斗系统,对于不大于20ms的积分时间可以灵活调节,对于长于20ms的积分时间也可以组合积分,但是组合结果变多,需要更多的资源。
种子填充法是从计算机图形学中得到的,一般用于对图像进行填充,基本思路为首先选择一个值为1的像素点作为种子,然后根据连通域的像素值相同和位置相邻条件,将相邻的像素值为1的点都进行合并到同一个像素集合中,就可以得到一个连通域。具体选择步骤如下:

图7 5ms和20ms相干积分仿真结果Fig.7 Simulation results of 5ms and 20ms coherent integration
3 实验验证与分析
3.1 实验环境搭建
基于FPGA平台的导航接收机和卫星信号模拟器搭建试验平台如图8所示。在接收机平台做相干积分,通过模拟器调整输入信号的强度,对比分析长相干积分对弱信号跟踪能力的影响。

图8 实验验证平台Fig.8 Experimental verification platform
3.2 实验及结果分析
以5ms相干积分为实验背景,根据上述分析可提高信噪比约7dB。为保证实验的可对比性,在同一次试验中接收机前6个通道中的跟踪环路采用1ms相干积分;后6个通道环路采用5ms相干积分,跟踪的卫星与前6个通道跟踪卫星完全相同,即同一次实验对同一颗卫星分别采用1ms和5ms相干积分两种跟踪方式。
1)静态测试:首先进行静态场景测试,通过卫星信号模拟器调节卫星信号的强度,使得信号强度不断减小,通过串口输出环路跟踪相关的信息,实验结果如图9~图11所示。
2)动态测试:动态测试场景是用户X轴方向匀速100m/s运动,其他实验方法与静态实验相同,通过卫星信号模拟器调节卫星信号的强度,实验结果如图12~图14所示。
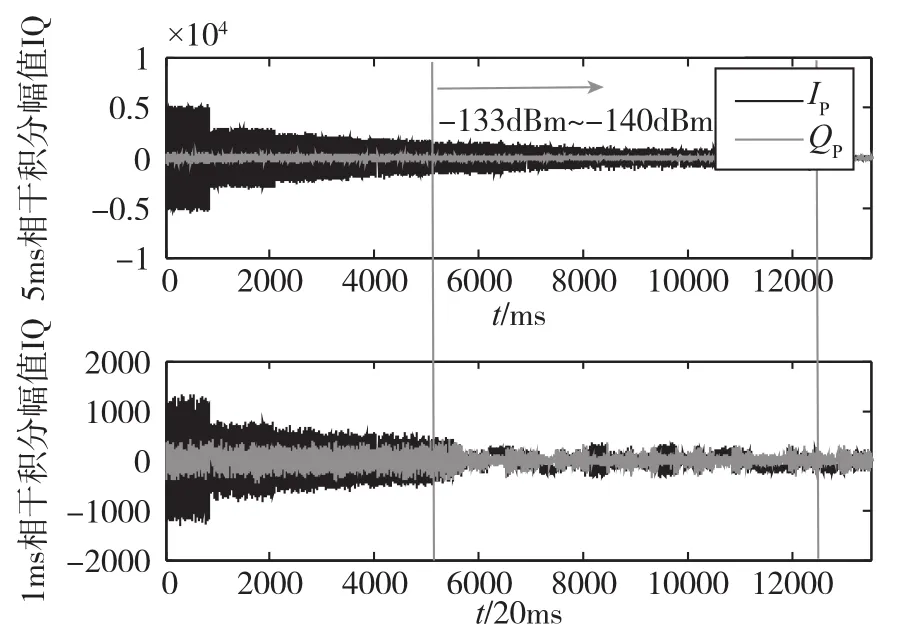
图9 静态场景下1ms/5ms相干积分幅值对比结果Fig.9 Amplitude comparison results of 1ms/5ms coherent integration under static environment

图10 静态场景下1ms/5ms相干积分环路载噪比Fig.10 Loop C/N0of 1ms/5ms coherent integration under static environment
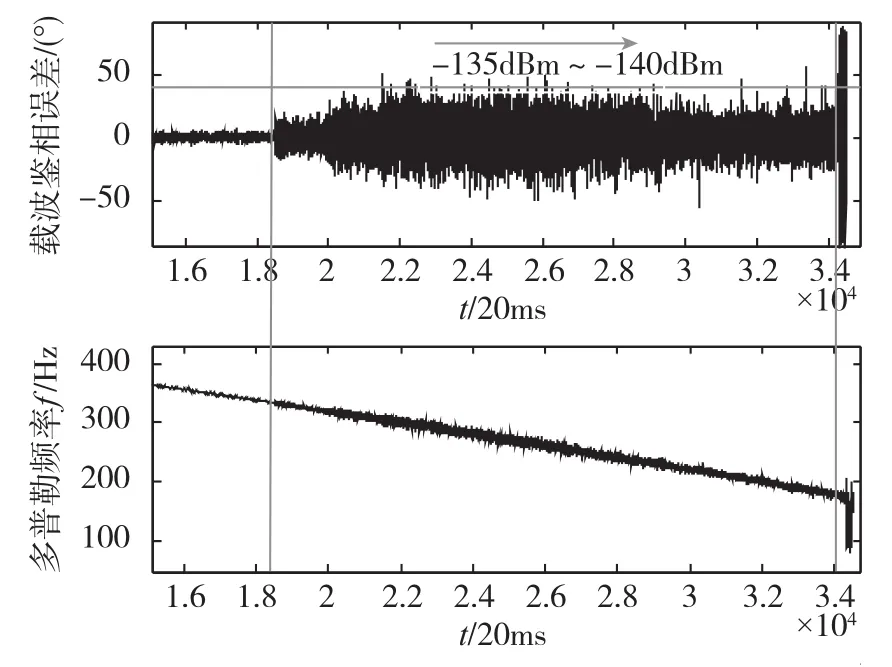
图11 静态场景下5ms相干积分环路多普勒和鉴相误差Fig.11 Loop frequency and loop error of 5ms coherent integration under static environment
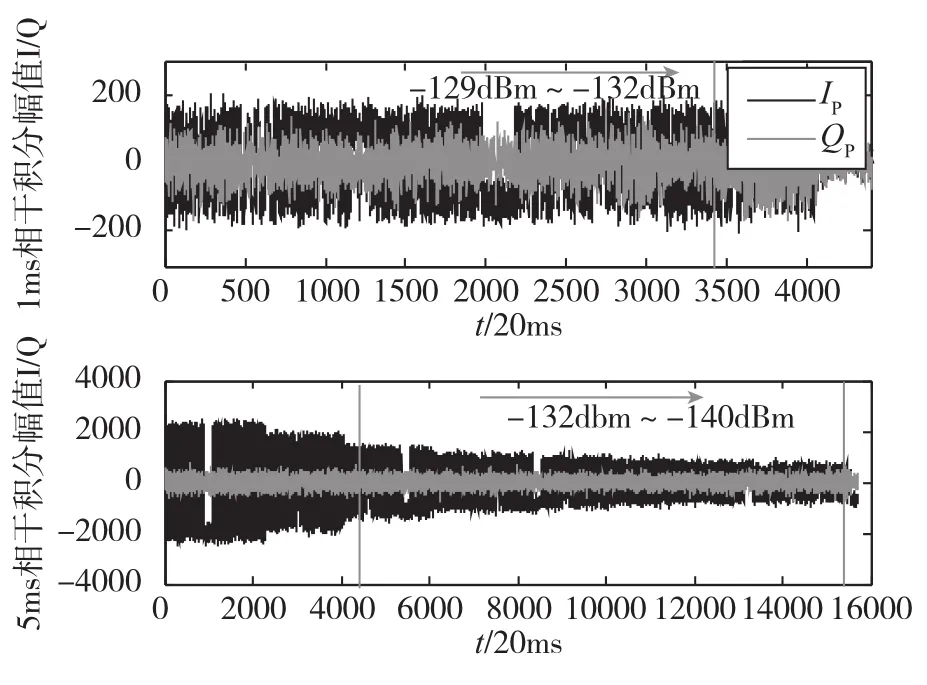
图12 动态场景下1ms/5ms相干积分幅值对比结果Fig.12 Amplitude comparison results of 1ms/5ms coherent integration under dynamic environment
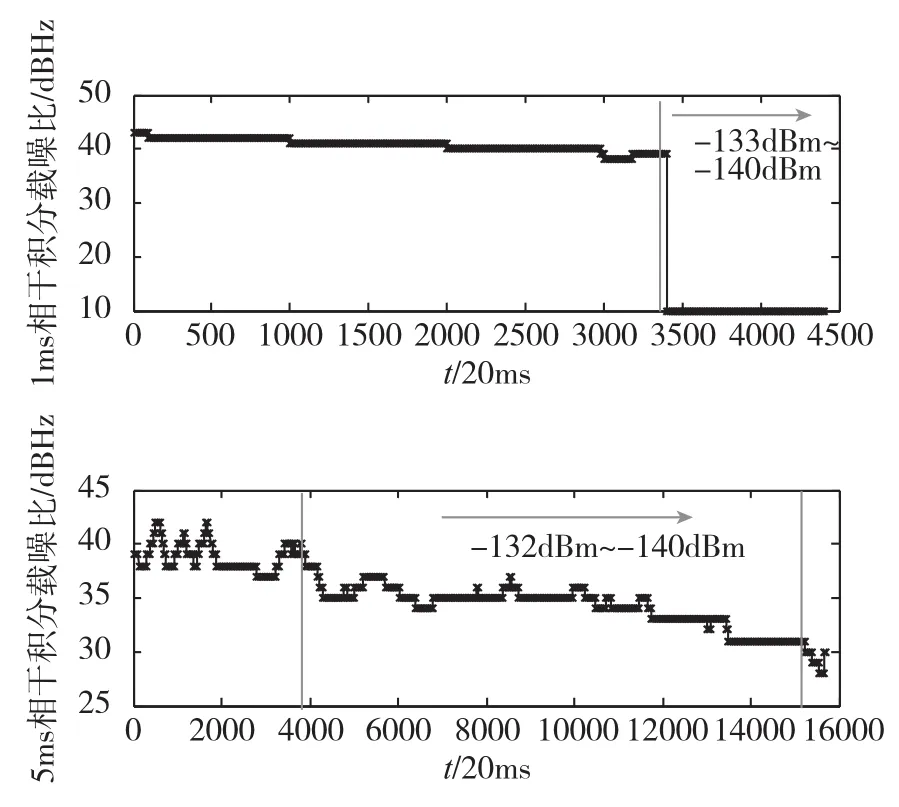
图13 动态场景下1ms/5ms相干积分环路载噪比Fig.13 Loop C/N0of 1ms/5ms coherent integration under dynamic environment

图14 动态场景下5ms相干积分环路多普勒和鉴相误差Fig.14 Loop frequency and loop error of 5ms coherent integration under dynamic environment
由图9和图12可以看出,加长相干积分时间,使得信号I路幅值线性增加,功率则呈平方增长,而零均值的噪声Q路幅值只是零均值叠加,能量线性增加。当信号降低到-133dBm时,1ms相干积分幅值I和Q已经不能分离信号和噪声,环路出现失锁。当信号降低到-140dBm时5ms相干积分的环路才出现失锁。
由图10和13可以看出,1ms相干积分在信号载噪比低于37dBHz时环路出现失锁现象,而5ms相干积分在信号载噪比31dBHz时才出现失锁。
由图11和图14可以看出,随着信号降低,5ms相干积分的环路鉴相误差和环路多普勒抖动都变大,当信号低于-140dBm时环路出现失锁现象。综上可以得到结论,此方法可以消除比特跳变对相干积分的影响,加长相干积分可以提高接收机弱信号跟踪能力。
4 结论
本文通过分析GPS和北斗卫星信号的调制方式的异同,深入研究了相干积分方法,提出一种基于改进直方图位同步方法的长相干积分方案,并在FPGA平台上设计实现,通过实验验证了其性能。综合实验结果可以得到如下结论:
1)此方法在硬件上易实现,兼容GPS和北斗导航系统,通过设定门限上限和多组门限下限大大提高比特边沿检测概率,针对不同的信号强度可以自适应调节门限值。
2)此方法可以很好地消除比特跳变带来的影响。对于20ms内的积分时间可以根据载体动态和信号强度等灵活调节;对于长于20ms的积分时间也可以组合积分,但是组合结果翻倍,需要更多的资源。
[1]刘海涛.高灵敏度GPS/Galileo双模导航接收机的研究与开发[D].国防科学技术大学,2006.LIU Hai⁃tao.The research and development of high sensi⁃tivity GPS/Galileo dual mode navigation receiver[D].Na⁃tional University of Defense Technology,2006.
[2]谢钢.GPS原理与接收机设计[M].北京:电子工业出版社,2009.XIE Gang.Principal of GPS and receiver design[M].E⁃lectronics Industry Press,2009.
[3]Cai C T,Pi Y M.The research progress of high sensitivity GPS technology[J].Journal of Global Positioning System(GPS),2006,31(2):1⁃4..
[4]Zou D,Deng Z,Huang J,et al.A study of Neuman Hoff⁃mancodesforGNSSapplication[C].20095thInternational Conference on Wireless Communications,Networking and Mobile Computing,IEEE,2009:1⁃4.
[5]Petovello M,O'Driscoll C,Lachapelle G.Weak signal carrier tracking using extended coherent integration with anultra⁃tightGNSS/IMU[C].Proceedingsof2008 EuropeanNavigationConference,Toulouse,France,2008:1⁃11.
[6]Ren T,Petovello M.An analysis of maximum likelihood estimation method for bit synchronization and decoding of GPS L1 C/A signals[J].Journal on Advances in Signal Processing,2014(2):1⁃12.
[7]严隆辉.GPS/BDII民用软件接收机基带算法研究与实现[D].电子科技大学,2013.YAN Long⁃hui.The research and implementation of the baseband algorithm in civil GPS/BD software receiver[D].University of Electronic Science and Technology,2013.
[8]Kokkonen M,Pietila S.A new bit synchronization method for a GPS receiver[C].Position Location and Navigation Symposium,IEEE,2002:85⁃90.
A ComPatible GPS and BD System Tracking LooP Coherent Method
ZHU Long⁃quan1,LI Rong⁃bing1,GAO Guan⁃gen2,HAN Zhi⁃feng1,LIU Jian⁃ye1
(1.Navigation Research Center,Nanjing University of Aeronautics and Astronautics,Nanjing 210016;2.Flight Automatic Control Research Institute,Xi'an 710065)
Under the city buildings,boulevard and mountains and valleys environment,GNSS signal attenuate seri⁃ously,therefore the receiver can't work continuously.To enhance receiver's tracking performance is significant.This paper presents a modified histogram method to achieve bit synchronization,after research and analysis GPS and BD data modula⁃tion type.This method sets multiple statistical threshold to achieve bit synchronization by using histogram,and designed a long coherent integration time method on the basis.The coherent method is compatible GPS and BD navigation system,and it's available to eliminate navigation message or NH code bring about bit flip.Finally,the coherent method was proved ef⁃fectively to enhance signal's SNR(signal⁃to⁃noise⁃rate)and tracking performance in FPGA platform.
weak signal;bit synchronization;coherent integration;FPGA;SNR
TP24
A
1674⁃5558(2016)01⁃01235
10.3969/j.issn.1674⁃5558.2016.06.004
2016⁃01⁃15
国家自然科学基金项目(编号:61273057)
朱龙泉,男,硕士,研究方向为卫星/惯性组合导航。
