LuGre摩擦模型的质体-弹簧-带自振系统稳定性分析
2016-12-13李加胜李小彭安镰锤闻邦椿
李加胜,李小彭,安镰锤,闻邦椿
(东北大学 机械工程与自动化学院,辽宁 沈阳 110819)
LuGre摩擦模型的质体-弹簧-带自振系统稳定性分析
李加胜,李小彭,安镰锤,闻邦椿
(东北大学 机械工程与自动化学院,辽宁 沈阳 110819)
为了能够深入研究摩擦自振系统的振动-摩擦耦合动力学特性,建立基于LuGre摩擦模型的质体-弹簧-带摩擦自激振动系统的非线性动力学模型,使用数值仿真等技术探讨了摩擦导向系统的动力学行为,并分析了该自振系统的稳定性.结果表明:摩擦自激振动系统的运动状态会随着进给速度的不同取值而发生变化.从仿真图可以看出,系统在不同进给速度下的行为是不一样的.系统的运动形式分别为:混沌运动、粘滑运动、纯滑动振动和稳定运动,不同的运动状态之间存在一个临界值,在临界值附近运动状态会发生变化.此外,该模型的自激振动系统动力学行为中含有随机性的混沌振动现象,基于LuGre摩擦模型可以预测出比Stribeck摩擦模型速度更低时的动力学行为.
LuGre 摩擦模型; 非线性动力学; 系统稳定性; 自激振动; 混沌振动
LIJia-sheng,LI Xiao-peng,AN Lian-chui,WEN Bang-chun
(School of Mechanical Engineering &Automation,Northeastern University,Shenyang 110819,China).
摩擦的存在往往会使零部件产生严重磨损,引起噪声和振动,降低机械系统的精度和运转效率[1].随着机械工业的发展以及新的摩擦模型的不断发展变化,国内外学者从不同角度对摩擦引起的振动问题展开了广泛的研究.李小彭[2]等从微观角度来研究了平面结合面的摩擦对振动的影响.通过建立含有摩擦的分形模型,研究几个参数对法向接触阻尼的影响,为结合面动力学的建模和特性分析奠定了基础.GDANIEC[3]等通过采用LuGre模型对单自由度的摩擦振子进行了研究,发现对于不同的摩擦系数和进给速度会产生摩擦诱发振动中的分岔和混沌现象,而且大部分运动都为混沌运动.MADELEINE[4]研究了一个两自由度的质量-阻尼-弹簧系统在受到间歇加载时的摩擦激振现象.HARTOGT D[5]提出了一种近似的理想干摩擦模型,得到了两次黏滞的对称形式周期振动的封闭解.SHAW[6]将HARTOGT D的摩擦模型扩展为非定常摩擦系数进行研究,得到了观察非对称响应的分岔判据.OESTREICH[7]等研究了基于库仑摩擦模型的单自由度振荡器的分岔和稳定性特性.ELMER[8]通过研究无阻尼和不同摩擦函数时质量块-带的黏滑和纯滑动振动,提出了黏滑和纯滑动振动之间相互转换的表达式,得到了典型的局部和全局的分岔图.但是目前摩擦自激振动机理没有获得深入的研究,因此本研究旨在对含有摩擦的进给振动系统进行动力学特性分析,以典型的机床切削系统和进给系统为研究对象,通过建立典型的动摩擦力模型,来进行摩擦和振动相互作用的研究以及自激振动的研究.通过对系统建立二维的动力学模型,使用数值仿真等技术探讨了摩擦导向系统的动力学行为.本研究对于促进摩擦动力学的发展,研究和解决由于摩擦而产生的动力学问题具有重要的价值.
1 摩擦自激振动系统模型的建立
由于状态参数的变化与系统的质量、阻尼、刚度、摩擦因素、法向振动有直接的密切的关系,所以用基于这种关系建立的模型对机床系统进行研究,建立如图1所示的系统物理模型.

图1 质量-弹簧-带的自激振动系统模型
质量块-弹簧-带自激振动系统模型常用于分析机械进给系统的黏滑运动.质量块A位于以恒速v0运行的传动带上,和阻尼系数为c的阻尼器和固定端刚度为k的弹簧连接,质量块和带间的摩擦力F为质量块提供驱动力.图中F1表示质量块的法向力,ω为频率,t为时间.
2 摩擦自激振动系统的解析分析
2.1 摩擦自激振动系统的建模
摩擦自激振动模型采用图1所示的系统动力学模型,摩擦力采用LuGre摩擦模型,可得:
(1)
式中:m为被驱动件A的质量;x为位移量.
将式(1)中的量无量纲化,则式(1)变为
(2)

2.2 LuGre摩擦力稳定性分析


(3)
式中:σ0为变形刚性系数;Fc为库伦摩擦力;Fs为最大静摩擦力;e为常数2.718;vs为边界润滑摩擦临界速度.
当系统处于稳定运动时,摩擦力可以表示为速度的关系式:
F=σ0g(v)+σ2v=Fc+
(4)
式中:σ2为粘性摩擦系数.
公式(4)的偏微分方程为
(5)
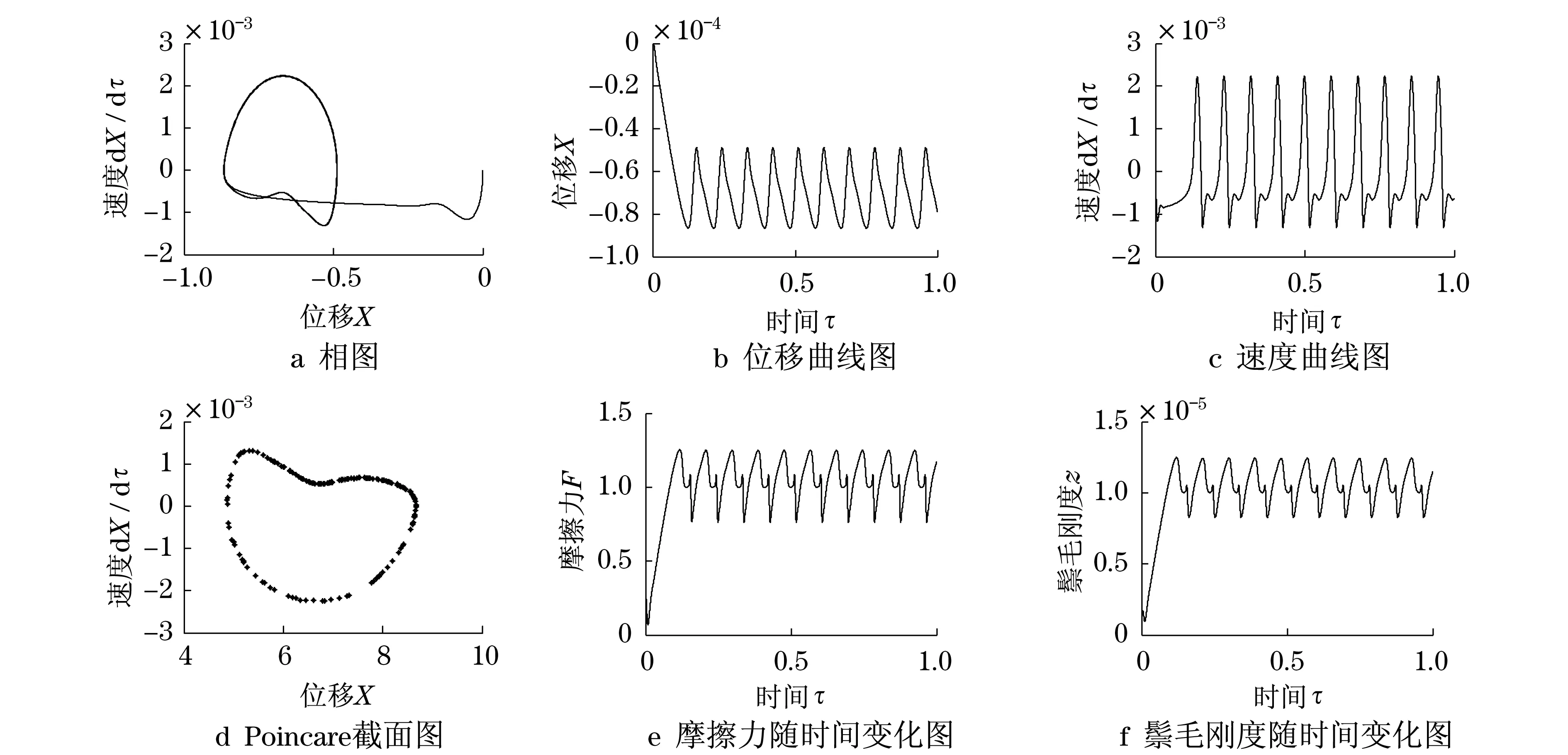
当v0足够大或者足够小时,式(5)中的第一项相对于第二项很小.因此,v0必然存在临界值v′0.摩擦力随相对速度的关系如图2所示.从图2可以看出,当0 图2 摩擦力随相对速度变化的曲线图 通过求解方程,运用迭代算法,可以得出v′0≈3vs. 不同的参数会对系统的响应有一定的影响.现在通过改变进给速度来进行设定系统刚度下的仿真[9-10].工具为MATLAB,方法为ode23s,相对误差设置为1×10-7.当系统刚度k=15 000 N·m时,摩擦自激振动系统的仿真结果如下: 图3 v0=0.000 3 m·s-1时系统的动力学特性图 图4 v0=0.000 4 m·s-1时系统的动力学特性图 图5 v0=0.001 m·s-1时系统的动力学特性图 图6 v0=0.01 m·s-1时系统动力学特性图 图7 v0=0.1 m·s-1时系统动力学特性图 (1) 从相图、时域曲线图和Poincare截面图可以看出,当v0=0.000 3 m·s-1时,系统振动为混沌运动;而当v0=0.000 4 m·s-1时,系统相图轨迹为典型的马蹄形轨迹.当v0=0.001 m·s-1时,系统相图轨迹仍然为典型的马蹄形轨迹,不过此时位移和速度幅值均减小了,而周期却开始逐渐增大.当v0=0.01 m·s-1时,系统运动为典型的黏滑自激振动;当速度继续增大时,系统运动开始稳定在稳定点附近,此时不再有周期振动,系统处于稳定状态. 这说明存在3个临界值,这个3个临界值将系统运动分成了4种不同的运动状态:当v0小于最小值(v0≈3vs)时,系统运动为周期运动,轨迹为马蹄形轨迹,这实际上就是周期运动和混沌的分界标志;当v0大于中间值而小于最大临界值时,系统运动为黏滑的自激振动,并且随着速度的增加,振动幅值也随之增加;当v0大于最大临界值时,系统运动开始稳定在平衡点附近,处于静止状态,此时不再有周期运动. (2) 从摩擦力和鬃毛刚度随时间变化的图可以看出,当摩擦力一直增加到大于库仑摩擦力时,摩擦力在库仑摩擦力附近开始呈现一定规律的周期性变化趋势.此外,不管进给速度如何变化,摩擦力和鬃毛刚度的变化趋势基本都是一致的,并且后者和前者总是呈现一定的正比例关系;且随着相对速度的增加,动态摩擦力的的变化幅度逐渐变小,最后趋向于零. (1) 本研究讨论了稳定状态下的摩擦力,得到了摩擦力变化趋势改变时的临界速度,此时,摩擦自激振动系统的运动状态会随着进给速度的不同取值而发生变化. (2) 运用MATLAB软件进行系统的数值仿真,从仿真图看出来系统在不同进给速度下的行为是不一样,系统运动形式分别为:混沌运动、黏滑运动、纯滑动振动和稳定运动,不同的运动状态之间存在一个临界值,在临界值附近运动状态会发生变化. (3) 此外,和基于Stribeck摩擦模型自激振动系统动力学分析结果[11]不一样的是,基于LuGre模型的自激振动系统动力学行为中含有随机性的混沌振动现象.并且可以看出,基于LuGre摩擦模型可以预测出比Stribeck摩擦模型速度更低时的动力学行为.最后,可以得出对于不同的摩擦模型,对于不同的进给速度,系统响应各不相同. [1] ALTINTASA Y,WECKB M.Chatter stability of metal cutting and grinding [J].CIRP Annals - Manufacturing Technology,2004,53(2):619-642. [2] 李小彭,王伟,赵米鹊,等.考虑摩擦因素影响的结合面切向接触阻尼分形预估模型及其仿真[J],机械工程学报,2012,48(23):46-50. LI Xiaopeng,WANG Wei,ZHAO Mique,et al.Fractal prediction model for tangential contact damping of joint surface considering friction factors and its simulation [J].Journal of Mechanical Engineering,2012,48(23):46-50. [3] GDANIEC P,WEIß C,HOFFMAN N.On chaotic friction induced vibration due to rate dependent friction[J].Mechanics Research Communications,2010,37:92-95. [4] MADELEINE P.New limit cycles of dry friction oscillators under harmonic load [J].Nonlinear Dynamic,2012,70:1435-1443. [5] HARTOG J P D.Forced vibration with combined coulomb and viscous friction [J].Transaction of the ASME,APM,1931,53(9):107-115. [6] SHAWS W.On the dynamic response of a system with dry friction [J].Journal of Sound and Vibration,l986,108(2):305-325. [7] OESTREICH M,HINRICHS N,POPP K.Bifurcation and stability analysis for a non-smooth friction oscillator [J].Archive of Applied Mechanics,1996,66,301-314. [8] ELMERF J.Nonlinear dynamics of dry friction [J].J.Phys.A-Math.General,1997,30:6057-6063. [9] ROBERT A,GORDER V,ROY S,et al.On Shil'nikov analysis of homoclinic and heteroclinic orbits of the T system [J].Journal of Computational and Nonlinear Dynamics,2013,8(2):027001-004. [10] LI Yong,FENG Z C.Bifurcation and chaos in friction-induced vibration[J].Communications in Nonlinear Science and Numerical Simulation,2004,9:633-647. [11] 李小彭,鞠行,杨皓天,等.基于Stribeck模型的自激系统分岔混沌特性研究[J].振动、测试与诊断,2014(5):864-976. LI Xiaopeng,JU Xing,YANG Haotian et al.Stribeck-based study on the bifurcation and chaos of self-excitied vibration system[J].Journal of Vibration,Measurement & Diagnosis,2014,05:864-976. Stability analysis on mass-spring-belt self-excited vibration systems via LuGre frictional model To further elaborate the vibration-friction coupling dynamical properties on self-excited vibration systems,the nonlinear dynamic model of mass-spring-belt friction self-excited vibration system is established based on the LuGre friction model.By using the numerical simulation for friction-led dynamical behaviors,the self-excited vibration system stability is analyzed.It is found from results that the motional state varies with feeding speeds.Due that the system behaviors are differentiated with different feeding speeds,the motional forms comprise the chaotic motion,stick-slip motion,pure sliding vibration and stable motion with critical values between different motional states.In addition,the random chaotic vibration exists in dynamical behaviors.As such,this approach can predict the dynamical behaviors under lower speeds than Stribeck frictional model LuGre frictional model; nonlinear dynamics; system stability; self-excited vibration; chaotic vibration; Stribeck frictional model 国家自然科学基金资助项目(51275079);辽宁省人才基金(2014921018) 李加胜(1991-),男,硕士.E-mail:neujsli@163.com TH 113.1 A 1672-5581(2016)01-0012-05

3 摩擦系统的数值仿真分析




4 小结
