一种履带式车辆运动的六自由度仿真方法
2016-12-12翟永翠
翟永翠
(江苏自动化研究所,江苏 连云港 222061)
一种履带式车辆运动的六自由度仿真方法
翟永翠
(江苏自动化研究所,江苏 连云港 222061)
提出了一种基于三维地形碰撞检测的履带式车辆六自由度运动仿真方法,详细阐述了采用六球体简化履带运动的仿真建模过程,具有运算量小、仿真方法简单、仿真效果逼真等特点; 解决了履带车辆随三维地形起伏运动的问题,为履带车辆模拟训练产品中的车辆六自由度运动仿真提供了简单、高效、逼真的仿真方法.
履带车辆; 六自由度; 仿真建模; 碰撞检测
在三维虚拟现实仿真过程中,为逼真展现履带式车辆随地形变化而产生的起伏、颠簸运动,就必须依据地形信息、车辆运动性能等,实时模拟仿真车辆的位置、姿态等六自由度运动信息,展现履带车辆(如坦克,履带式挖掘机,履带式推土机等设备)在三维地形中上的运动过程.因此对于履带车辆而言,其起伏状态完全由当前履带所接触到的地形所确定的,既不能简单将履带车辆简化为一个刚体来处理,也不能将其当作轮式车辆进行处理[1-3].
对于大型的地面来说,使用精细的地形来进行物理的碰撞检测是一种通用可行的方法.但在实际使用过程中,因为硬件运行效率的限制,均通过网格的三角面来进行碰撞检测,从而完成碰撞检测的操作,会导致系统整体的运行效果下降.网格变化之后,所有的网格均需要重新计算才能再次进行物理碰撞检测操作[4-6].这种方法耗时较长、对硬件要求较高,对于实时性较强的应用来说是不能接受的,因此需要研究一种简化、高效的物理算法,来模拟履带车辆在地形网格上的运动.
本文以建立三维仿真中履带式车辆行走系统的六自由度模型为目标,首先介绍了履带式车辆行走系统的基本建模方法,详细阐述本文提出的一种基于地形碰撞检测的履带车辆建模方法的简化方法,并简要描述了该建模方法在某推土机虚拟训练仿真项目中的应用效果,为三维虚拟仿真中坦克、推土机、挖掘机等履带车辆的运动仿真,提供了简单、高效、逼真的仿真建模方法.
1 履带车辆行走系统建模过程
履带车辆行走系统是由履带和若干负重轮组成的,地形的起伏导致履带和负重轮的上下高底不相同,进而使得坦克的角度不同.现实中,履带车的承重轮是由多个不同的刚体构成的,如图1所示.

图1 履带车辆承重轮的变化
根据履带车辆的动力学方程,作用在履带上的张紧力可以分为3个部分:
① 驱动轮与相邻轮之间的履带张紧力Ts2为
(1)
式中:Ms为驱动力矩;rs为驱动轮半径.
② 张紧轮与其相邻支重轮之间的张紧力Ti2.不考虑履带质量并忽略履带与张紧轮之间的摩擦时,履带张紧力等于张紧装置的张紧力.
③ 支重轮之间履带的张力,由于相邻支重轮的垂向位移不同,其位移差造成支重轮之间的履带张力,支重轮左、右两侧履带张力为
(2)
式中:Tz,Ty表示支重轮左、右两侧履带张力;ywi为紧张轮和张紧轮之间的摩擦系数;μi(i+1)(i=1,2…5)为轮子弹簧的刚度.
当轮子发生相对运动时,履带会对它产生约束作用:
(3)
式中:Fsi为悬架作用在轮上的合力;γi(i+1)为相邻轮之间的相对距离;mwi为轮子质量;g为重力加速度.
在三维环境中,地面是由一系的网格构成,计算机通过点和点的索引来构成三角面,进而构成了一个整体的网格.对于大型的地面来说使用精细的地形来进行物理的碰撞检测在理论上是可行的,但是在实际使用过程中因为硬件运行效率的限制,会导致系统整体的运行效果下降.因为对于现有的物理系统来说,均是通过网格的三角面来进行碰撞检测从而完成碰撞相应的操作的.
现有的物理系统首先将所有多于三条边的多边形分割成三角片,即把物体表面三角化.然后采用一阶和二阶方法对构成物体的所有三角形的所有三角片的顶点进行统计,分别求得均值U、协方差矩阵C.设第i个三角片的顶点是pi,qi,ri,则有

(4)

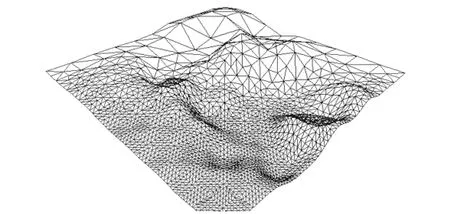
图2 地形的网格
网格变化之后,所有的网格均需要重新计算才能再次进行物理碰撞检测操作.常用的算法为:构造Voronoi图,利用凸性建立用于验证最近特征的局部适用准则,确定最近特征对,然后计算两个最近特征间的距离以判断两个凸多面体是否相交.该算法利用了运动的空间及时间的连贯性,假定新的最近特征对是上一时刻最近特征对邻近的特征,因而下一时刻最近特征对的确认不再需要全局搜索,见图3.
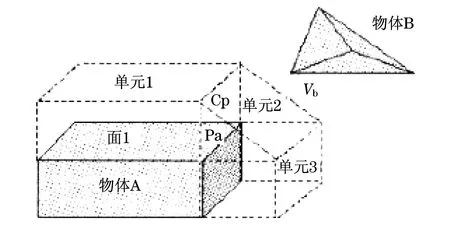
图3 基于Voronoi图的特征对搜索方法
面1和顶点Vb分别为物体 A,B上的候选特征,先测试看点Vb是否在面1的Voronoi域(单元 1)里.由于Vb在约束面Cp外,故下一步测试Vb是否在Cp指向的邻近域(单元 2)中,如此测试下去直到两特征都分别位于对方的Voronoi域中,这样的特征对即为最近特征对.一般情况下,物体在相邻两时刻位移不大,故相邻两时刻的最近特征对相隔也不会很远,最近特征对的更新花费时间很少,从而使得该算法具有实时性.
但是该算法耗时较长,对于实时性较强的应用来说这是不能接受的.因此需要一种简化而高效的物理算法来完成履带车辆在网格地形上的运动情况.
2 基于地形碰撞检测的履带车辆建模方法
2.1 履带车辆简化
履带车辆的上部形状不会影响到车辆的运动状态,因此在三维空间中可以简化为一个BOX刚体对象,而这个BOX对象使用预设值的包围盒方式,包围盒应能紧密包围物体,同时又便于高效地对一条光线和包围盒做求交测试.对于碰撞检测算法,可借助一个函数来分析:
T=NvCv+NpCp+NuCu
(5)
式中:T是碰撞检测的总耗费;Nv是参与重叠测试的包围盒的对数;Cv是一对包围盒做重叠测试的耗费;Np是参与求交测试的几何元的对数;Cp是一对几何元做求交测试的耗费;Nu是物体运动后包围盒层次需要修改的结点个数;Cu是修改一个结点的耗费.
根据T这一耗费函数,可以推测理想的包围盒应满足如下要求:①在各层次上紧凑地逼近输入模型及其子部分,以减少Nv,Np; ②支持快速为一对包围盒做重叠测试,以减少Cv; ③当物体旋转或平移时,支持对其包围盒层次中结点的快速修改,以减少Cu.
根据上述算法,可以直接将车辆的上体简化为一个BOX包围盒,简化后的刚体对象就能够表示整个履带车辆的倾斜情况,由于上体下方轮子的位置变化导致上部刚体位置也发生相应变化,见图4.
对于常规的车辆,如汽车,它们与的接触点只有4点,因此能够在很短时间内就对地形和车辆的倾斜角度进行计算和相关的仿真.在这个简化的过程中,我们可以建立上部刚体的位置和角度的相关性方程:
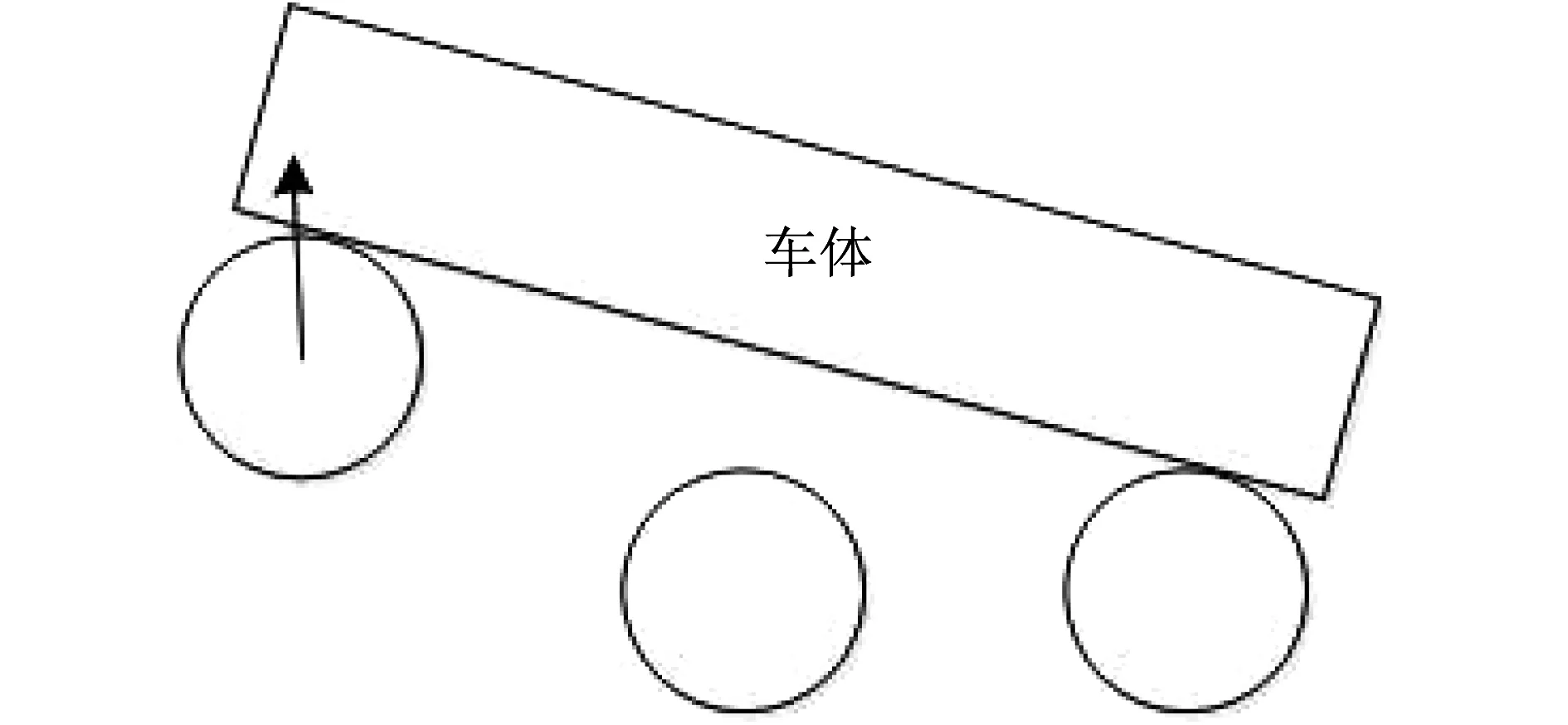
图4 车轮位置变化导致车体发生变化
(6)
式中:FC是上部刚体的旋转角度;Wi是车轮i的相关度; 而k是当前车辆偏移中心的距离.
2.2 地形碰撞检测
常规的基于网格的碰撞检测是基于网格点构成的三角面进行的,在大规模的处理过程中会导致系统的效率严重下降.而基于简化的车轮模型中,只要确定当前车轮的位置即可.因此无需计算整个网格的碰撞过程而仅需要计算当前接触点的碰撞,并将此碰撞转化为车轮的上下移动即可.如图5中的顶部区域,仅需要计算车轮周边的区域即可.
图5 网格的局部区域
通过将车轮的位置转化为网格对象的局部坐标系统,可以在网格的局部坐标中计算当前车轮周边的点,并将这些点的位置近似计算为车轮的接触点,即
(7)
式中,MPi是当前点在网格局部的坐标点;pi是第i个车轮的坐标点;M′是转化矩阵.
因此在三维空间中,可以直接计算当前车轮所在周边网格点的高度位置,从而确定当前车轮的位置:
(8)
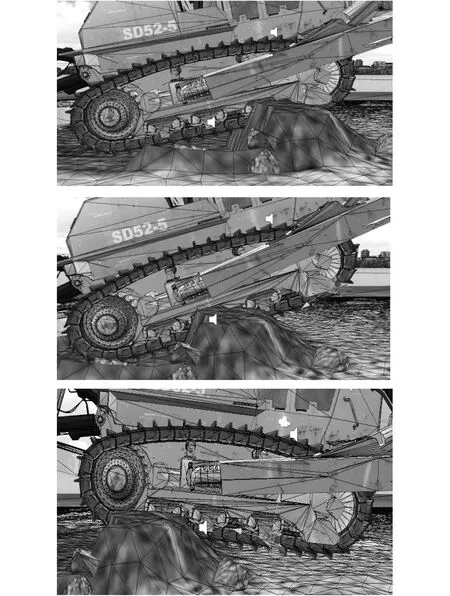
式中:pi是车轮周边的点的坐标值,满足条件(pi-MPi) 2.3 碰撞检测点的简化 对于履带车辆,履带和车辆的碰撞点有很多个,在一定程度上计算大量的碰撞点在实际操作中是不可行的.因此需要对碰撞点进行简化处理.对于一般的车辆,使用4个点的碰撞即可完成车轮与地面碰撞的检测,而为了更好地处理履带车辆在凹凸起伏的路面的行进状态,可以加入更多的点进行处理.在这里我们使用6个点的处理方式来进行,使用6个检测点后,可以检测到车体中间的起伏状态,从而将车体的中部抬起,见图6. 图6 4个检测点与6个检测点包围球 使用6个碰撞点避免了车体中间陷入地形面的情况,可以看出在图6中,中间轮子的突起导致了上部刚体角度的变化,在系统中,我们只需要获得上部刚体的倾斜角度即可,而对于未发生变化的前后轮子并不考虑他们的变化. 简化后的数学模型实际上为包围盒的碰撞检测算法,而对于包围球间的相交测试也相对比较简单.c1,r1分别是包围球1的球心和半径,c2,r2分别是包围球2的球心和半径,如果球心距离小于半径之和,即|c1-c2| <(r1+r2),则两包围球相交,可进一步简化为判断(c1-c2)(c1-c2) <2(r1+r2).故包围球间的相交测试需要4次加减运算、4次乘法运算和1次比较运算. 虽然包围球的紧密性在所有包围盒类型中是比较差的,它除了对在3个坐标轴上分布的比较均匀的几何体外,几乎都会留下很大的空隙,在大多数情况下包围球无论是紧密性还是简单性都有所不如,因此,它是使用得比较少的一种包围盒.当对象发生旋转运动时,包围球不需要做任何更新,这是包围球比较优秀的一个特性,当几何对象进行频繁的旋转运动时,采用包围球可能得到较好的结果.当对象发生变形时,很难从子结点的包围球合成父结点的包围球,只能重新计算.但对于一般的仿真来说,这种包围球和包围盒方式已经能够完全满足要求,并且由于它的执行效率比较高,因此被广泛应用. 使用Unity3d作为试验平台,我们绘制了一个网格,使用的履带车辆为SD52型推土机,在履带车的底部我们使用了6个检测点来检测网格的起伏情况,如图7,分别试验不同的起伏状态对车辆的影响.试验中,车辆的履带和地面接触部分有部分相交,在当前模型下由于采样点使用的是均值采样,因此在一定程度上车轮和地面会有不同程度的交叠,但是在实际情况下,这种交叠是存在的. 图7 地形起伏引起的车辆姿态变化 履带车辆的行走运动是三维虚拟仿真中的重点,本文提出采用六球体简化履带运动的仿真建模方法,通过六球体的高度变化建立履带车辆上部倾斜角的模型算法,解决了履带车辆随三维地形起伏运动的问题.本方法可用于坦克、挖掘机、推土机等履带车辆设备的六自由度仿真建模,解决了传统算法的计算量大、对硬件要求较高、实时性不强等问题,具有运算量小、仿真方法简单、仿真效果逼真等特点. [1] 孙冬,魏勇.视景仿真中履带车辆模拟[J].科学技术与工程,2013,13(32):9565-9568. SUN Dong,WEI Yong.Simulation of tracked vehicle in visual simulation[J].science technology and engineering,2013,13(32):9565-9568. [2] 成凯,徐晓龙.履带式湿地系列推土机行走机构的仿真[J].中国工程机械学报,2013,11(4):331-336. CHENG Kai,XU Xiaolong.Simulation of the running mechanism of the crawler type wetland bulldozer[J].Chinese Journal of construetion Machinery,2013,11(4):331-336. [3] 张琦,孙劭文.履带式工程车辆训练模拟器动力学建模与实现[J].中国工程机械学报,2006,17(增刊):392-394. ZHANG Qi,SUN Shaowen.Tracked engineering vehicle training simulator dynamic modeling and implementation of[J].Chinese Journal of construetion Machinery,2006,17(Suppl):392-394. [4] 贾小平,樊石光.不同路面下的履带运输车动力学仿真[J].机械研究与应用,2014,27(1):36-38. JIA Xiaoping,FAN Shiguang.Under different pavement tracked vehicle dynamics simulation[J].Mechanical Research and Application,2014,27(1):36-38. [5] 翟永翠,韩海良.履带车辆六自由度仿真方法:中国,CN201310642242.6[P].2013-12-10. ZHAI Yongcui,HAN Hailiang.Six degrees of freedom simulation method of tracked vehicle:China,CN201310642242.6[P].2013-12-10. [6] 张涛,郭志强,周志立.橡胶履带车辆行走系统的动力模型及脱轮问题仿真分析[J].河南科技大学学报:自然科学版,2006,27(6):12-15. ZHANG Tao,GUO Zhiqgang,ZHOU Zhili.Simulation of off-wheel problem of high speed tracked vehicle′s running system[J].Journal of Henan University:Sience and Technology:2006,27(6):12-15. Six degrees of freedom simulation on tracked vehicle movement ZHAI Yong-cui (Jiangsu Automation Research Institute,Lianyungang 222061,China) Firstly, the kinematic simulation method for tracked vehicles is proposed based on six degrees of freedom for 3D terrain collision detection.Then, the six sphere predigest is described for modeling process.Next, this method possesses easy computation, simple simulation and distinct effect to resolve the terrain rolling problem.Finally, the simple, efficient and distinct properties of the proposed approach are proven among training products. tracked vehicle; six degrees of freedom; simulation; collision detection 翟永翠(1978-),女,研究员.E-mail:846586867@qq.com TP391.9 A 1672-5581(2016)03-0211-05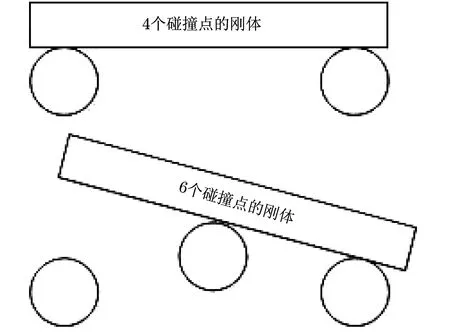
3 试验结果
4 结语
