海上浮吊平台作业的波浪补偿系统的仿真与研究
2016-12-12孙友刚李万莉刘祥勇
孙友刚,李万莉,刘祥勇
(同济大学机械与能源工程学院,上海 201804)
海上浮吊平台作业的波浪补偿系统的仿真与研究
孙友刚,李万莉,刘祥勇
(同济大学机械与能源工程学院,上海 201804)
浮吊在海上施工建设时,波浪的起伏会造成下降中的重物与突然上升的施工或补给对象的碰撞,导致重大安全事故的发生.为了抑制波浪对浮吊海上作业的动态影响,提高作业效率,提出一种基于在线遗传算法整定PID(Proportional-Integral-Darivative)控制器的主动式波浪补偿系统;在设计系统的基础上,采用ADAMS、AMESim和MATLAB联合仿真平台,对本方案的波浪补偿系统的控制效果进行仿真与研究.最后在物理样机中对该系统的控制策略的有效性进行试验验证.仿真和试验结果表明:该补偿系统能使吊运载荷的相对运动和波浪作用下船体的运动在升沉方向解耦,并且本文提出的控制器具有较高的鲁棒性和稳定性,能根据海况的变化及时调整控制参数,控制效果令人满意.
海上施工; 浮吊; 波浪补偿系统; 控制策略; 港口机械
随着海洋资源的开发、海上工程建设不断扩大,在海况恶劣的海面更加安全、平稳、准确地进行工程建设、补给货物变得越来越重要.浮吊是海洋工程装备里最重要的设备之一.在海上工程建设、海上货物补给调运等方面发挥着重要的作用[1-3].浮吊的作业环境比较特殊,船体容易受到波浪的作用而偏离设定好的位置.国内外很多研究学者在防止船体水平方向偏离设定位置方面做了大量的研究,给出了路径规划和安全距离[4-6].但浮吊的作业安全隐患更多来自于波浪作用下海洋结构物或船体在升沉方向的意外起伏.波浪补偿是指因海面起伏引起作业装备产生波动而进行的补偿校正.浮吊在进行物资补给时,下降中的重物容易和突然上升的船体发生碰撞,造成重大事故.而波浪补偿系统则能保证货物与被补给船甲板具有较恒定的相对速度,将货物平稳地下放到被补给船上.
波浪补偿控制的结构形式繁多,一般按控制力的执行方式分为被动式控制和主动式控制.被动式波浪补偿控制是指当两船的升沉运动引起测量绳索的张力变化后,通过绳索张力的变化来控制补偿参数.被动式控制主要由执行装置和随动装置组成,根据吊钩感受到的被补给船升沉起伏信号拖动随动装置,达到补偿控制的目的.主要形式有气液混合型、随动型、液压缓冲补偿型等形式[7-8].我国目前比较广泛运用的就是这种控制方式,但它的缺点比较明显:①刚度、阻尼等参数一般通过经验设计,在作业中不能随外部状态变化而变化,适应性差;②补偿时系统冲击较大,给海上作业带来安全隐患;③结构体积十分庞大,需要对被补给船有较大改装.
主动式波浪补偿控制主要由传感器、执行器和控制器组成,控制器为核心部件.作业时,控制器根据传感器检测到的船舶相对运动信号,立刻产生与之方向相反、大小相同的主动力驱动信号,通过控制执行器实现波浪补偿.因其冲击不大、补偿的范围大、控制精度高、安全性好、钢丝绳使用寿命长等优点成为未来研究的主要方向.目前虽然主动式控制的工程实际应用尚不成熟,特别是国内仍处于研究试验阶段,但国内外近年来对其研究还是取得了一定的进展.
JOHN等[9]分析了依赖GPS-RTK 和船舶运动高精度加速度感应器如MRU(Motion Reference Unit)测量的船舶运动状态.提出的测量信号离线处理方法,为主动式补偿控制系统中船体运动的预报开拓了思路.SVEIN等[10]人将带前馈补偿的阻抗控制方法应用于浮吊的波浪补偿控制研究,实现了波浪补偿的主动控制.陆卫杰等[11]人建立了导弹补给动力学方程并进行了仿真,得到了不同海况、不同位置的运动规律,并在国内首次建成了以PLC(Programmable Logic Controller)为核心的军舰并靠补给控制系统,安全地实现海上导弹的直接补给安装,并通过试验平台验证了补给控制系统的可靠性和安全性.徐小军[12]等提出了基于耦合式行星传动调速的主动式波浪补偿控制系统.完成了系统的数学建模、调速器动力学分析、多目标模糊可靠性优化设计、控制策略研究和原型样机研制等工作,验证了补偿控制系统在补偿能力、范围、精度等方面能满足在复杂海况下作业的要求.
以上的方案旨在有效地检测船体姿态然后设计一个闭环控制系统.然而一个新产品从设计到应用需要在样机的搭建、测试和验证上花费大量的时间和金钱,因此本文应用基于ADAMS、AMESim和MATLAB联合仿真平台的虚拟样机技术,来帮助工程师修改机械设计、完善控制策略.在联合仿真平台上可对不同海况下波浪补偿系统的控制性能进行仿真研究.因为外部环境即海况是不断变化的,故本文提出遗传算法在线整定PID控制参数的控制策略,并在缩比的物理样机上对控制效果进行了验证.
1 波浪补偿系统的组成和工作原理
本文研究的波浪补偿系统主要由机械执行系统、电液伺服驱动系统、传感器检测系统和计算机控制系统4个子系统组成,如图 2所示.

图2 波浪补偿系统的机构组成
机械执行系统由卷扬机、钢丝绳、滑轮组及臂架等组成,是实现重物吊运的最终装置.电液伺服驱动系统由油泵、蓄能器、安全阀块、伺服阀、平衡阀和液压马达等组成.油泵提供系统压力及流量,根据输入信号,通过伺服阀对液压马达进行转速控制.传感器检测系统由高性能传感器(如专业的船体姿态检测传感器MRU)及数据处理单元组成,实现船舶姿态运动以及吊重速度、位移等信号的实时采集.计算机控制系统由软件系统和硬件平台组成.根据执行装置输入量、船舶姿态的运动量、反馈量,通过控制算法来控制执行机构.
浮吊和被补给船升沉方向的速度分别为VA和VB,吊重相对于全局坐标的下降速度为VM,吊重相对于被补给船的速度为VBM,额定补给速度为VS,浮吊和被补给船之间的升沉方向相对速度为VBA.
(1) 当无波浪补偿时
(1)
(2) 当有波浪补偿时,补偿的目标为
(2)
设补偿速度为VC,则重物速度为
(3)
(4)
对比公式(1)和(4),得出补偿速度与船体运动关系为
(5)
引入补偿速度VC使得重物相对于被补给船的下降速度与两船的相对运动(VA-VB)无关,重物就可以由浮吊平稳地下放到被补给船上,达到波浪补偿的目的.
因为在海上工作,浮吊受到风浪影响较为显著.风作用在浮吊结构上的拖拽力FD(t)[13]为
(7)

另外,海浪引起的干扰是浮式平台运动的主要影响因素.描述海浪这个激励是建立浮吊模型的至关重要的部分.为了分析非线性系统,海浪力被分成了2个部分:主要频率的正弦波力的叠加和一个小的随机部分.波浪被下式描述[1]:
(8)
式中:fα,Ω和ε分别表示波浪的振幅,频率和相位.此处,力的正弦部分被fαsin(Ωt+ε)描述,Bξ表示随机干扰,B为随机干扰幅值,ξ为随机干扰基本项.
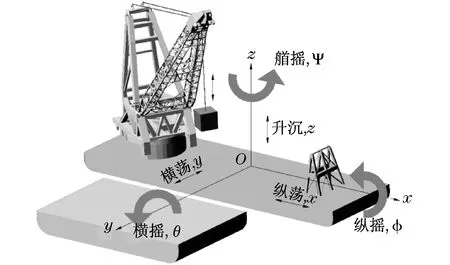
图3 浮吊在海上的运动
2 浮吊系统的动力学建模
为了建立浮吊系统的机械模型,根据物理模型的尺寸和形状用SOLIDWORKS建立浮吊系统的3D模型.然后将模型导入ADAMS环境中,根据实际的材料属性,质量,转动惯量等相关参数来定义各个部件.并且通过约束来连接每个部件.如:转台和船体之间用旋转副连接; 变幅钢丝绳的一端和臂架通过球铰来连接.起升钢丝绳的一端和卷筒直接通过固定副来连接[14].在船体中心添加波浪干扰,如图4所示.
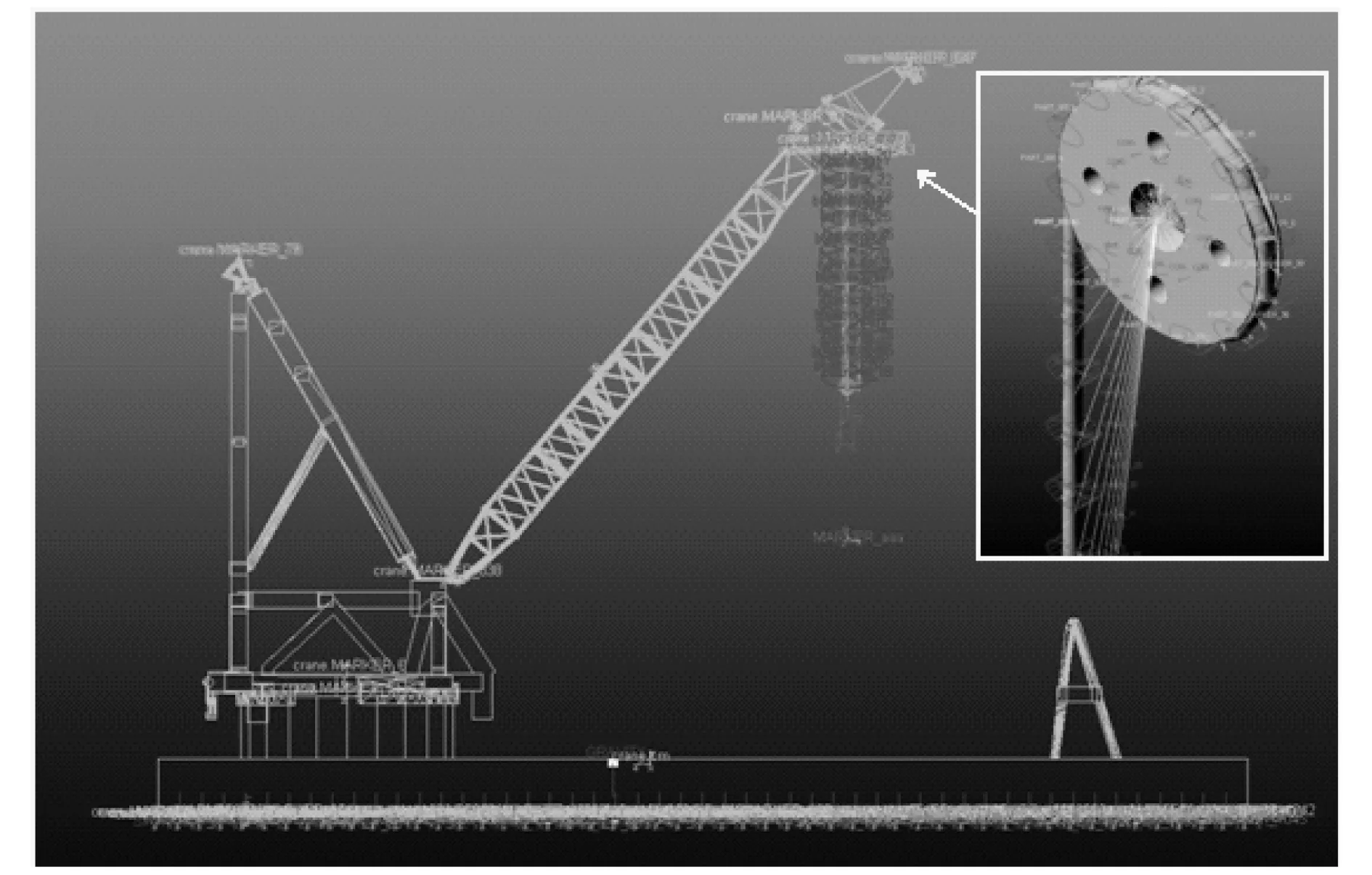
图4 波浪作用下的浮吊模型
通过在仿真中修改参数值可获得浮吊的吊物系统在不同情况下的动力学响应.比如在三级海况下(9.3 s的波浪周期,1.2 m的有义波高),起升钢丝绳的长度为22 m(共振长度),得到重物悬停状态下的摇摆角度(α,β),如图5所示.面内角α和面外角β的摆动规律和幅值和文献[15-16]很接近.其中MASOUD等[15]在3自由度运动平台上通过T-ACS船只的1/24比例模型对模型的有效性进行了验证.这一定程度上验证了本文虚拟样机模型的可信度.

图5 吊重的摇摆角度(α,β)
3 波浪补偿系统的建模
波浪补偿系统的控制系统结构如图6所示,其中伺服阀控液压马达为速度伺服系统.

图6 波浪补偿控制系统结构图
伺服系统根据速度的指令输入与实际检测到的重物速度相比较,得到速度偏差信号.偏差信号通过控制器运算、放大后,实时控制伺服阀的阀口大小与方向,进而控制重物的速度与方向.
在ADAMS和AMESim联合仿真平台上建立主动波浪补偿的仿真模型,建模完成后,进入参数设置模式,对各元件进行参数设置.
在AMESim环境中将波浪的位移曲线和液压马达的输出扭矩传递到ADAMS机械动力系统中.ADMAS里的卷轮转速,重物位移和重物速度反馈到AMESim液压系统中.在ADAMS中分别将需要输入、输出的参数设置为状态变量,通常使用ADAMS内部函数来定义.被补给船相对于重物的运动用MOTION变量驱动,卷轮所需要驱动的扭矩用TORQUE变量驱动,将卷轮转速、重物位移和重物速度作为输出变量.在AMESim 中,导入定义好的ADAMS 机械运动模块,完整的联合仿真模型可建立.如图7所示.
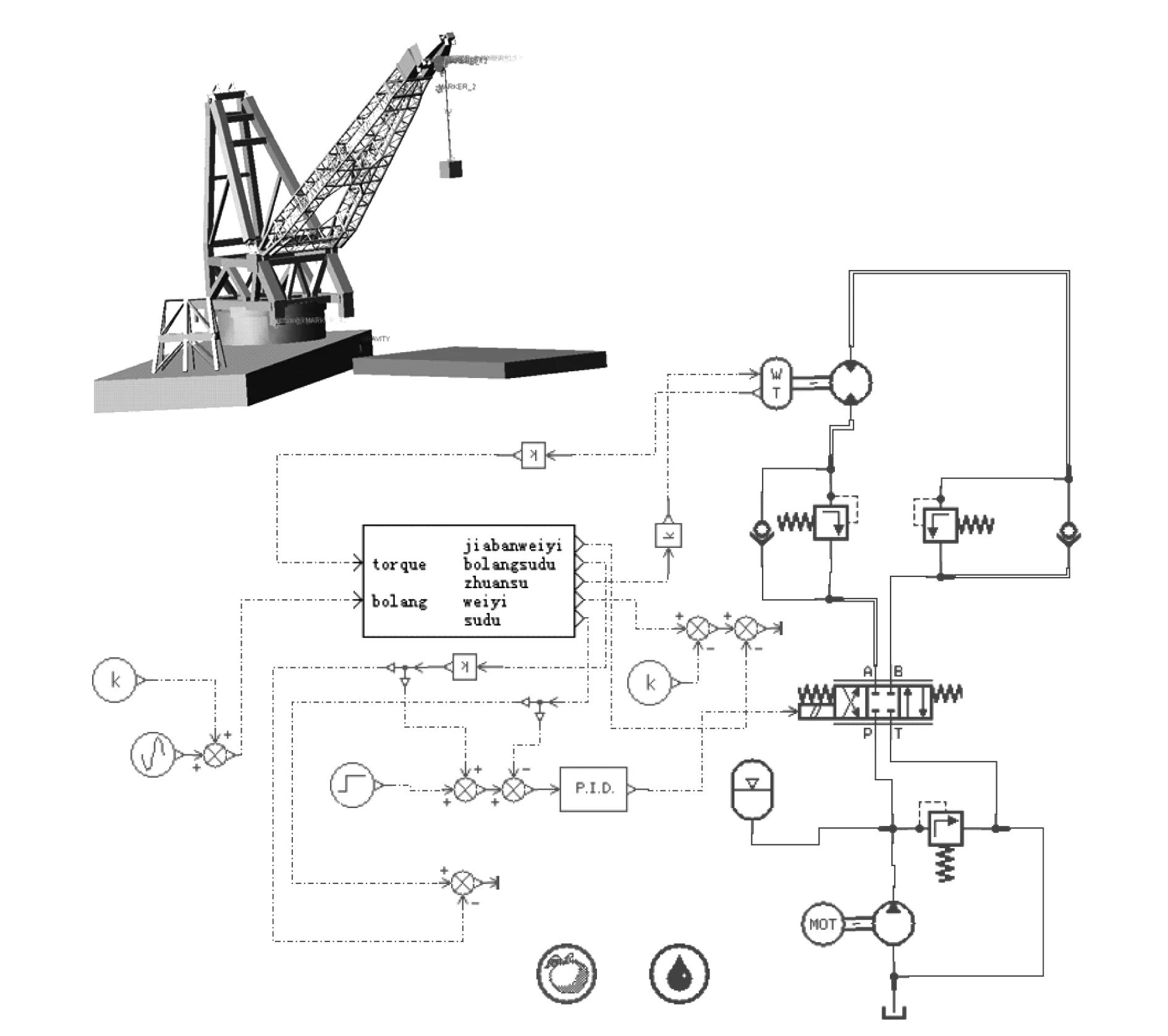
图7 波浪补偿系统的虚拟样机模型
4 控制策略的设计
浮吊在海上作业模型是非线性系统,不同情况下的海况是不一样的.传统的比例-积分-微分(PID)控制器是比例、积分、微分的线性组合,表达为:
(9)
式中:e(t)为系统误差;kp为比例系数;ti为积分时间常数;td为微分时间常数.
传统的试错法是在工程中最广泛运用的PID参数整定方法.它对工程经验要求很高且对超调的抑制效果不好,达不到最优控制效果.对于浮吊而言,要在不同的海况下工作,在一种海况下整定的控制参数在另一种海况下不一定适用.而且如果超调过大,还是会影响浮吊的作业安全.因此,本文提出一种基于遗传算法在线整定PID参数的方法.
4.1 基于遗传算法的在线整定过程
遗传算法(GA)是一种随机化的搜索方法,是由生物界的适者生存、优胜劣汰的进化规律演化而来的.其主要特征是直接对结构对象等进行操作,不存在求导和函数连续性的限定; 具有内在的隐并行性和更好的全局寻优能力.已被人们广泛地应用于组合优化、机器学习、信号处理、自适应控制和人工生命等领域.
由于PID控制器有3个参数需要整定,本文的遗传算法采用多参数的实数编码方式.染色体是由3个实数kp,ki,kd结合起来的编码串.解码即将其切断就可得到相应的实数.最小目标函数为误差、误差积分和误差变化率的绝对值的加权和.同时引入惩罚功能,当出现e(i)<0时,最小目标函数将加上一个大于0 的项.整个遗传优化的流程如图8所示.
4.2 改进型遗传算法
基于遗传算法的波浪补偿控制系统有较高的实时性要求,并且为了避免无效的交叉和繁殖,需要对遗传操作进行一些改进,具体如下:
(1) 改变遗传操作的顺序组织使得交叉和复制同时存在; 设置父代的个体适应度值f(i),使得选择概率ps为
(10)
式中:n为种群的大小,个体复制数为m=psn,如果m<1,设置m=0并且nr=(n-∑m)>0
(2) 改变交叉操作完全随机的特征,使得其具有选择性.对个体引入家族检索编号.禁止具有相同编号的进行交叉操作,见图13.(rsi表示检索编号)个体i和j的交叉操作如下所示:

图9 选择性交叉操作
(11)

(3) 将随机变异改变为可控的随机操作.种群中的个体顺序按适应度值从小到大排序,is表示个体i的编号.变异率pm可由下式表示.
(12)
式中:A是一个限制最大变异率的常数;δ是小于1的控制因子.
5 联合仿真结果
波浪补偿系统的仿真在ADAMS、AMESim和MATLAB联合仿真的平台下进行.基于前文建立的动力学、液压、控制模型,进行联合仿真来研究波浪补偿系统在不同海况下的动态特性和安全效果.相关仿真参数的值见表1.

表1 波浪补偿系统参数
为了保证海上作业的安全,波浪补偿系统必须在任何海况下具有快速反应,较小的超调等良好的动态特性.将传统的PID控制器和本文提出的控制器分别在两种海况下进行仿真.两个控制器各自在两种海况下的阶跃响应如图10所示.红色和蓝色的线分别表示传统PID控制器和本文提出的控制器在第一种海况下的阶跃响应.相应的,紫色和绿色则为第二种海况下的阶跃响应.在图中可以明显的看出,传统PID控制器在海况改变时动态表现很差而且超调很大.而本文提出的控制器在海况改变的情况下依然有很优秀的动态表现,收敛迅速、静态误差趋近于0而且超调小于2%.

图10 两种控制器在两种不同海况下的阶跃响应

图11 在不同海况下的相对速度
图11是本文提出的控制器在不同海况下的仿真结果.可以看出即使海况改变,重物相对于被补给船甲板在垂直方向上始终保持0.3 m·s-1的速度,波浪的干扰被很明显的消除,这样就能保证浮吊在海上过驳时的安全性和高效性.仿真的结果表明本文提出的波浪补偿系统能满足浮吊在不同海况下安全作业的基本要求.
6 试验结果
因为建立浮吊以及波浪补偿系统,并在真实的各种海况下进行测试研究是比较困难的.我们在试验室环境下建立了缩比物理样机来验证波浪补偿系统的控制策略.
试验设备包括传感器测量系统,伺服电机驱动系统,DSP控制系统和机械执行系统,如图12所示.其中伺服电机运行特性良好,是典型的数字控制执行元件.选择伺服电机作为伺服驱动来代替液压马达,对验证控制策略的有效性影响很小.传感器的一端固定在重物上,另一端固定在模拟的甲板上.传感器可以方便的测出下降的重物和上下运动的甲板的相对速度.图13为物理样机的实物模型图.

图12 试验样机的结构图

图13 试验样机的结构图
系统的参数分别为:吊重mx=10 kg,目标相对速度vz=3 cm·s-1.模拟甲板低频运动的频率为flw≈0.125 Hz,高频为fhw=0.5 Hz.
改进遗传算子使得控制器有更高的搜索效率,在DSP控制器中编写基于遗传算法在线整定PID参数的程序.进化代数不超过10代就能达到最小值且在线整定一次的时间不超过0.03 s.
如图14所示,在低频下主动式控制系统的效果良好,稳态误差小于4%,因为真实海浪的激励频率也偏低,所以试验完全达到预期的控制效果.从图15可以看出,控制系统在稳定补给时,船舶的受迫运动频率对补偿效果和控制性能影响很大.在高频下,吊重呈现出微幅的振荡,降低了补偿精度.但可以看出本主动式升沉补偿系统的控制策略基本原理正确,速度跟随性能较好,达到所需的控制效果.

图14 低频干扰下吊重的相对速度

图15 高频干扰下吊重的相对速度
另外,由图13,14可以看出,吊重的运动具有一定的振荡.产生此现象的主要原因是开式齿轮传动系统不平稳,存在振动现象.另外速度改变时的冲击和传感器的检测误差等对其也有一定的影响.在目前的试验条件下,振荡还不太容易消除,这也是值得继续研究的课题之一.
7 结论
(1) 在ADAMS中对浮吊模型进行动力学仿真,直观的揭示不同系统参数和工况下浮吊的吊物系统的动力学响应特性.
(2) 基于ADAMS、AMESim和MATLAB建立波浪补偿系统的机电液一体化联合仿真模型,研究补偿系统在海浪干扰下的表现.系统采用闭环PID反馈调速控制策略,并用遗传算法对PID参数进行在线整定,提高了控制系统的鲁棒性和稳定性.仿真结果表明对波浪干扰的控制效果令人满意.
(3) 试验室条件下建立波浪补偿系统的物理样机.对本文提出的控制策略的可行性和有效性进行用试验验证,结果表明所提出的控制策略满足所需的控制要求.
[1] 董达善,孙友刚,刘龙,等.基于虚拟样机技术的浮吊补给作业动态特性仿真研究[J].机械科学与技术,2015,34(3):393-397.
DONG Dashan,SUN Yougang,LIU Long,et al.Simulation study on dynamic characters of floating crane based on virtual prototype technology[J].Mechanical Science and Technology for Aerospace Engineering,2015,34(3):393-397.
[2] 王悦民,童民慧.超大型浮吊重载打捞波浪补偿系统的关键技术[J].中国工程机械学报,2009,7(3):362-366.
WANG Yuemin,TONG Minhui.Vital technologies on heavy-loading salvage for wave compensation system of ultra-large floating cranes[J].Chinese Journal of Construction Machinery,2009,7(3):362-366.
[3] 董达善,孙友刚,刘龙.浮吊海上补给作业的动态特性仿真分析与研究[J].科学技术与工程,2013,20:5872-5876.
DONG Dashan,SUN Yougang,LIU Long.Simulation studies on dynamic characters of floating cranes[J].Science Technology and Engineering,2013,20:5872 -5877.
[4] DO K D,JIANG Z P,PAN J.Universal controllers for stabilization and tracking of underactuated ships[J].Systems & Control Letters,2002,47(4):299-317.
[5] LIAO Y L,SU Y M,CAO J.Trajectory planning and tracking control for underactuated unmanned surface vessels[J].Journal of Central South University.2014,21(2):540-549.
[6] SERRANO M E,SCAGLIA G J E,GODOY S A.Trajectory tracking of underactuated surface vessels:a linear algebra approach[J].IEEE Transactions on Control Systems Technology.2014,22(3):1103-1111.
[7] 邵曼华,寇雄,赵鹏程.几种船用起重机波浪补偿装置[J].机械工程师,2004(2):25-28.
SHAO Manhua,KOU Xiong,ZHAO Pengcheng.Several heave compensation device of ship based crane[J].Mechanical Engineer,2004(2):25-28.
[8] 姜飞龙,赵瑞姜,飞燕.被动式波浪补偿系统的研究[J].起重运输机械,2011(4):10-12.
JIANG Feilong,ZHAO Ruijiang,FEI Yan.Study of the passive heave compensation system[J].Lifting the Transport Machinery,2011(4):10-12.
[9] JOHN M G.High quality heave measurements based on GPS RTK and accelerometer technology[J].OCEANS 2000 MTS/IEEE Conference and Exhibition,2000,2(1):309-314.
[10] SVEINI S.Active control of underwater installation[J].IEEET Transactions on Control Systema Technology,2002,10(5):743-748.
[11] 陆卫杰.船艇并靠导弹补给及波浪补偿系统研究[D].南京:南京理工大学,2006.
LU Weijie.Research on the missile replenishment by boat and the heave compensation system[D].Nanjing:Nanjing University of Science & Technology,2006.
[12] 徐小军.基于耦合行星传动调速的波浪补偿系统研究[D].长沙:国防科学技术大学,2009.
XU Xiaojun.Research on the heave compensation system based on coupled planetary transmission speed[D].Changsha:University of Science and Technology for National Defense,2009.
[13] JANG J J,LEE C S.Reliability analysis of maximum wind force for offshore structure design[C]∥Proceedings of the 12th(2002) International Offshore And Polar Engineering Conference,Cupertino:ISOPE,2002:442-449.
[14] 董达善,孙友刚,刘龙.基于虚拟样机技术的钢丝绳动张力仿真研究[J].机床与液压.2013,41(17):156-158.
DONG Dashan,SUN Yougang,LIU Long.Study on dynamic tension of wire rope based on virtual prototype technology[J].Machine tools and hydraulic.2013,41(17):156-158.
[15] MASOUD Z N,NAYFEH A H,MOOK D T.Cargo pendulation reduction of ship-mounted cranes[J].Nonlinear Dynamics,2004,35(3):299-311.
[16] IDRES M M,YOUSSEF K S,MOOK D T,et al.A nonlinear 8-DOF coupled crane-ship dynamic model[C]∥Collection of Technical Papers-AIAA/ASME/ASCE/AHS/ASC Structures,Structural Dynamics and Materials Conference,Reston:American Institute of Aeronautics and Astronautics(AIAA),2003:4187-4197.
Simulation on heave compensation system for floating cranes during offshore operation
SUN You-gang,LI Wan-li,LIU Xiang-yong
(College of Mechanical Engineering, Tongji University, shanghai 201804)
During the sea construction of floating cranes, the heaves produce the descending load and ascending construction collisions.In order to reduce the wave impact and improve the operation efficiency, an adaptive PID controller for heave compensation system is first proposed based on improved genetic algorithm.the co-simulation platform is then utilized for the control effect.Finally, under the physical prototype environment, an experiment is conducted to verify the effectiveness of the control strategy.Therein, it is demonstrated from simulation and experimental results that the proposed system can decouple the payload motion into the wave-induced ship motions in the vertical direction.Moreover, the proposed controller with high robustness and stability can timely adjust control parameters according to the change of sea conditions and satisfactory control results.
offshore construction; floating crane; heave compensation system; control strategy; port machinery
国家科技支撑计划项目(2013BAG19B00-01),“十二五”国家科技支撑计划项目(2011BAJ02B00)
孙友刚(1989-),男,博士研究生.E-mali: 1989yoga@tongji.edu.cn
TG 156
A
1672-5581(2016)03-0198-08
