机器人用高精度RV减速器曲轴误差
2016-12-12华滨滨郑钰馨卜王辉李梦如
奚 鹰,华滨滨,郑钰馨,卜王辉,李梦如
(同济大学机械与能源工程学院,上海 201804)
机器人用高精度RV减速器曲轴误差
奚 鹰,华滨滨,郑钰馨,卜王辉,李梦如
(同济大学机械与能源工程学院,上海 201804)
机器人用高精度RV(Rotate Vector)减速器的曲轴存在制造装配误差,为了保证RV减速器的传动精度、承载能力、总体回差和传动效率等要求,必须控制曲轴的设计精度.分析了曲轴偏心距和偏心距误差对RV减速器传动精度的影响,建立了曲轴偏心距和偏心距误差影响的数学模型,使用MATLAB进行了仿真计算.结果表明:某型RV减速器曲轴偏心距应为1.3 mm,其偏心距误差负向分布有助于提高精度,加载后有助于减小回差间隙.
RV减速器; 曲轴; 传动精度; 偏心距误差
机器人用高精度RV减速器是一种新兴起的二级减速传动装置.该减速器采用共用曲轴和输出机构的结构形式组成的封闭式行星传动,具有承载能力强、传动比大、运动精度高、传动平稳等优点[1].鉴于RV传动的高精度要求,目前提高传动精度,降低传动误差已经成为RV减速器研究的热点.文献[2]利用纯几何学方法研究单轮的摆线针轮行星减速器的回转精度;文献[3]对RV减速器的动态传动精度进行了研究和仿真;文献[4]研究了影响RV减速器运动精度的主要影响因素和具体表现;文献[5]针对RV减速器的重要部件曲轴进行了模态分析,并提出了改进意见.
由于曲轴同时作为第二级摆线行星传动的输入与输出,其偏心距及偏心距误差对机构输出的传动误差影响较大,加上曲轴数量较多造成曲轴偏心距误差.这个误差存在3种形式,即同向正分布,同向负分布和异向分布,故曲轴偏心距误差对整体传动误差的影响更为复杂.本文采用MATLAB理论计算的方式研究了针对某型RV减速器曲轴偏心距及其误差对整体传动误差造成的影响,该研究方法可为其他RV减速器曲轴偏心距及偏心距误差的设计提供一定参考.
1 RV传动原理与基本技术参数
RV减速器由一个行星齿轮减速器的前级和一个摆线针轮减速器的后级组成.如图1所示是某型RV减速器的整体结构简图,其基本参数如表1所示.输入轴与外部机构相联,渐开线行星轮与曲轴通过花键连成一体.如果输入轴顺时针方向旋转,它将带动渐开线行星轮在绕中心轮轴线公转的同时还逆时针方向自转,并通过曲轴带动摆线轴作偏心运动.此时摆线轮因受固定的针轮与之啮合的齿的约束,在其轴线绕针轮轴线公转的同时,还将反方向自转,即顺时针转动.
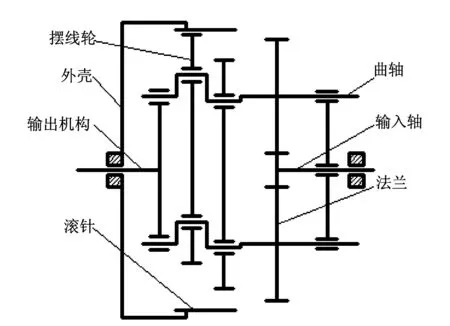
图1 RV减速器的组成结构图Fig.1 Composition structure of diagram RV reducer表1 某型减速器基本技术参数Tab.1 Basic technical parameters of the reducer
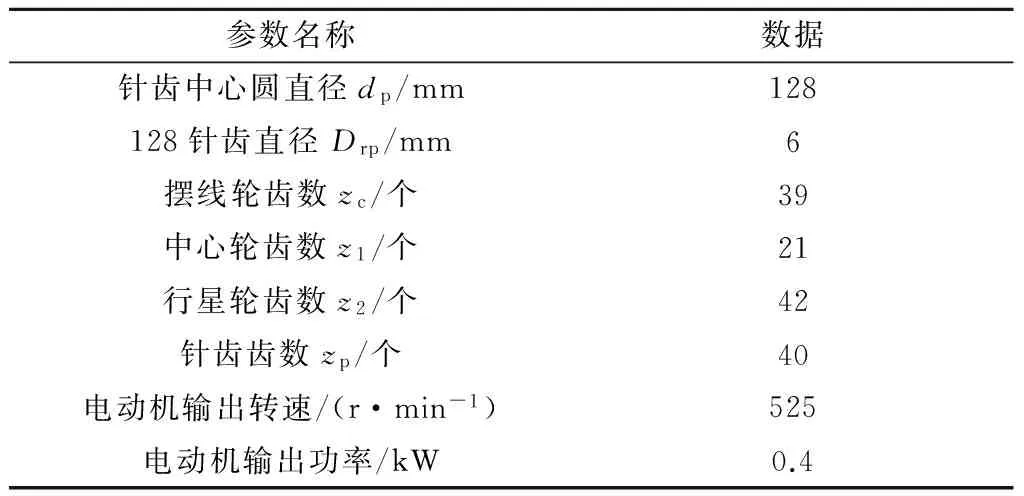
参数名称数据针齿中心圆直径dp/mm128128针齿直径Drp/mm6摆线轮齿数zc/个39中心轮齿数z1/个21行星轮齿数z2/个42针齿齿数zp/个40电动机输出转速/(r·min-1)525电动机输出功率/kW0.4
2 曲轴偏心距对传动精度的影响
由文献[6]可知,摆线针轮行星机构的传动误差加权系数大;对传动误差影响大;而渐开线行星机构的传动误差加权系数小,对传动误差影响小.且曲轴与减速器的整体传动误差Δφz[6]有如下关系:
(1)
式中:Δφ1为摆线轮行星机构引起的传动误差;Δφ2为行星架输出机构引起的传动误差.
根据概率理论:
(2)
(3)

在概率统计意义下,行星架输出机构引起的传动误差为
均值:
(4)
方差[6]:
(5)
式中:s为曲柄轴偏心距;μrw为星架组件三孔中心几何中心相对于行星架轴颈中心线的偏心公差;μrz为行星架支撑大轴颈径跳误差.
在概率统计意义下,计算摆线针轮行星机构的传动误差为
均值:
(6)
方差[6]:
(7)
将式(2)—(7)代入式(1),并通过MATLAB计算得到机构整体传动误差随曲轴偏心距变化的示意图,如图2所示.
从图2中可以看出,曲轴偏心距在1.31mm时,减速器整体传动误差达到最小值,约为0.018 57°,考虑到制造加工工艺要求选取曲柄轴偏心距为1.3mm.而当偏心距从1.2mm增大到1.3mm左右时,传动误差不断减小,从1.3mm继续增大时,传动误差不断增大.造成这种现象的原因是当偏心距过小时,摆线轮与滚针间间隙过大,实际承载传动时出现了瞬时啮合轮齿数量不足,传动中有速度波动,产生扭振和噪声,影响传动的平稳性;而当偏心距过大时,摆线轮与滚针间隙过大,造成两者干涉,产生扭振和噪声,影响传动精度.
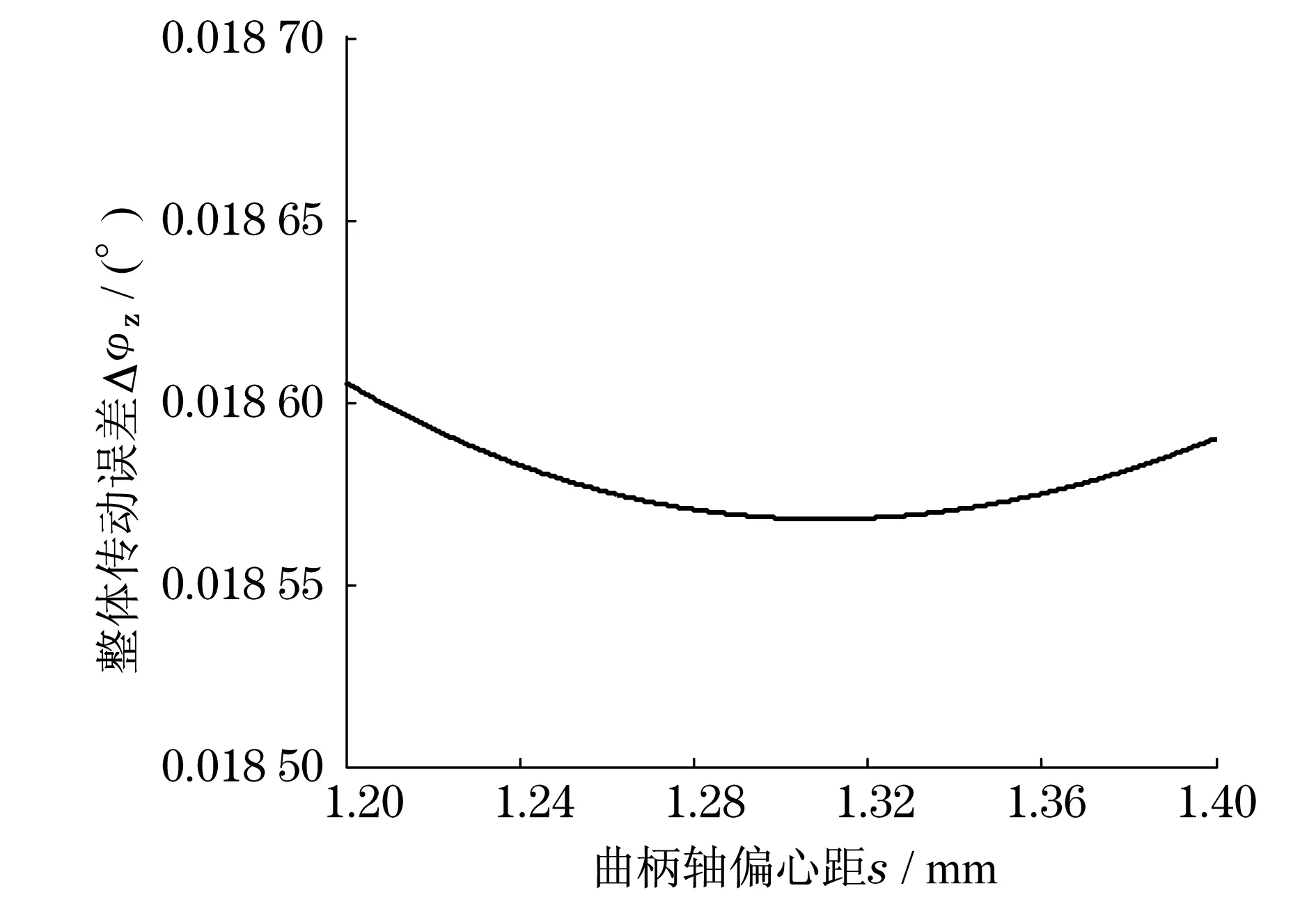
图2 传动误差变化曲线Fig.2 Curve of Transmission error
3 曲轴偏心距误差对传动精度的影响
3.1 曲柄数学模型的建立
对于RV减速器而言各种原始误差中对机构输出转角误差影响最大的是输出盘上曲轴孔的偏心误差,其次是摆线轮[7-9].本次研究以偏心距误差为首要影响因素,以某型RV减速器为基础,分析其两根曲轴偏心距误差对机构输出转角误差的影响,并简化其他因素造成的影响.
在RV传动中,曲轴的受力分析实际上可简化为单自由度的平行四杆机构传动[10],其中曲轴的偏心距相当于曲轴l1和l3,曲轴转动角度相当于曲轴l1和l3转角α和β,摆线轮上两曲轴轴承孔中心距相当于连杆l2,输出机构上两曲轴轴承孔的中心距相当于机架l4.因此可将RV传动的误差分析转化为平行四杆机构的误差分析,其结构简图如图3所示.

图3 四杆机构误差分析示意简图Fig.3 Brief diagram of four bar mechanism error analysis
平行四杆机构的误差分析就是计算在给定α和β角情况下的位置角误差,即连杆(摆线轮)相对于输出杆的角度误差γ.在考虑曲轴偏心距误差对RV减速器传动精度造成的影响时,先假定只有两曲轴的偏心距存在偏差,其他几何尺寸是固定的.曲轴的偏心距误差即为平行四杆机构的曲轴长度误差.研究偏心距误差时,先分二种情况进行讨论:一种是刚性误差,即未加载荷时,仅由偏心距加工误差引起的RV减速器输出转角误差;另一种是弹性误差,即在加载荷之后,考虑叠加上在轴承作用力下发生弹性位移造的误差,分析这种变形引起的RV减速器输出转角误差.弹性变形的情况还可继续分为周向弯曲变形和扭转变形,应分别算出周向弯曲变形和扭转变形引起的输出轴转角误差.综合考虑刚性误差和弹性误差的平行四杆传动的模型如图4所示.
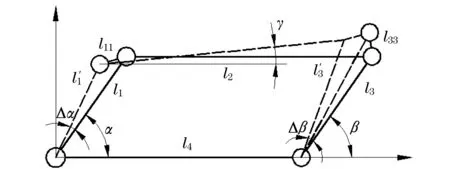
图4 四杆机构误差分析综合示意图Fig.4 Comprehensive diagram of four bar mechanism error analysis
当各杆长存在偏差时,其实际尺寸发生了变化,以杆1为例,杆1的等放偏心距为l′1,l′1=l1+l11(l11为杆1与杆2的铰接副的弹性位移),当铰接副中存在间隙时,在关节力的作用下,各铰接副中两半铰中心Pi和Pj(即相邻杆的端点)发生位移,其位移矢量可写为
(8)
式中:Δp为铰接副的半径间隙;fp为铰链p中杆j作用于杆i的关节力方向上的单位矢量.
所以当各杆长存在偏差、各铰接副中存在间隙时,这个四杆机构就不再构成平行四边形,根据机构误差分析示意图,其矢量方程为
(9)
经过计算可得
由于Δβ很小,简化可得:
(11)
式中:
由于分析时依次考虑曲轴的刚性精度和弹性精度,因此计算误差的一元二次方程应该有两种,一种是只考虑偏心距误差,忽略铰接处受力而产生的弹性位移;另一种则既考虑铰接处的弹性位移,又考虑偏心距误差.
由文献[9-10]可知,曲柄转角回差和曲轴转角有关,故在分析偏心距误差对传动精度的影响之前应先找到影响最大的曲柄转角,然后在这一固定的转角位置处分析偏心距误差的影响,即α从0°到180°变化过程中,寻找转角误差的最大值.求解式(11),并通过MATLAB绘出其图像,如图5所示.
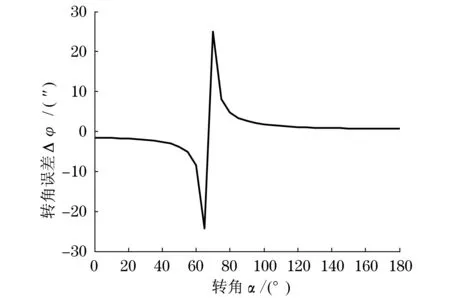
图5 转角α与转角误差的关系Fig.5 Relationship between the angleα and the angle error
从图5可看出,在α=70o时,转角误差最大,故重点研究α=70o的情况.造成这种现象的原因是由于RV减速器存在回差和转矩波动,摆线针轮用于计算传动比的瞬时中心不断改变,导致摆线针轮位置不连续,瞬时传动比与曲柄角具有某种变化关系.因此,在计算转角误差时,随着转角α的变化,转角误差具有如图5所示的变化趋势.
3.2 曲轴刚性精度分析
由前文可知,曲轴的刚性误差,即是未加载荷时仅由偏心距加工误差引起的RV减速器的输出转角误差.图6为曲轴在不加载情况下的精度分析模型.
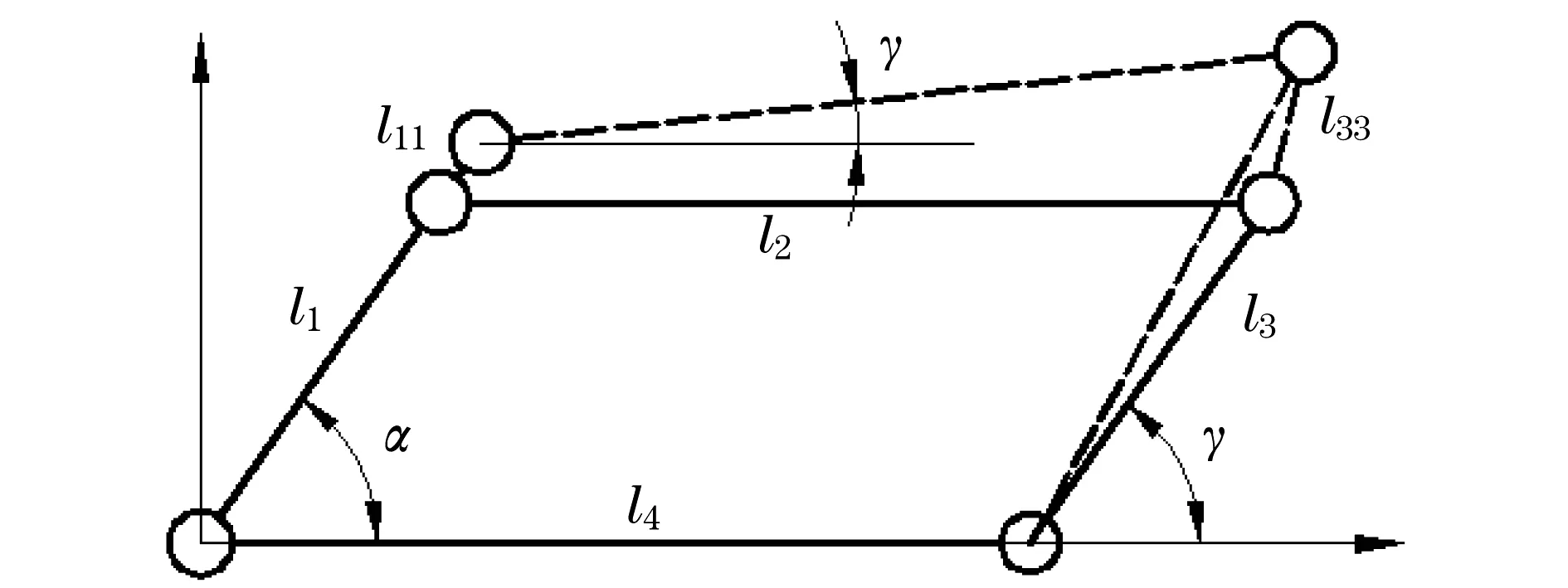
图6 四杆机构刚性精度分析示意简图Fig.6 Brief diagram of four bar mechanism error analysis on rigid precision
由于只考虑曲轴的刚性精度,故l′1=l1+l11,l′3=l3+l33(l33为杆2与杆3的铰接副的弹性位移),将其代入式(10)经过整理可得:
(12)
求解式(12),并通过MATLAB绘出其三维图像如图7所示.
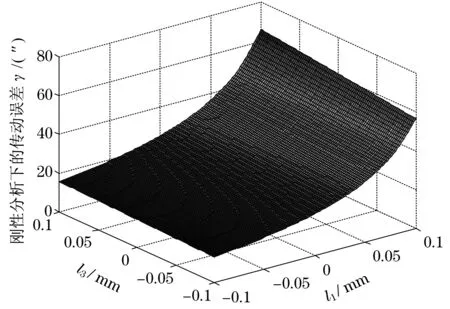
图7 刚性精度下偏心距误差对传动误差的影响三维图Fig.7 3D map of eccentricity error and the transmission error of the accuracy on rigid precision
由图7可知,传动误差变化的三维曲面为下凹面,当两根曲轴偏心距误差数值同时趋向-0.1mm时,传动误差数值逐渐偏小.为了更加清晰地观察,通过MATLAB绘制了其等高线图,如图8所示.
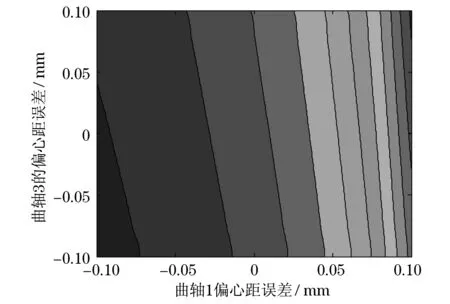
图8 刚性精度下偏心距误差对传动误差的影响等高线图Fig.8 Contour map of eccentricity error and the transmission error of the accuracy on rigid precision
综合对比图7和8可知,整个传动误差变化的三维曲面为下凹面.明显看出整个传动误差在曲轴的负向分布偏心距区域较平坦.要使转角误差最小,则曲轴1偏心距误差应控制在-0.05~0 mm,曲轴2偏心距误差应控制在-0.02~0.01 mm之间.转角误差最大的区域分别为两偏心距误差同正最大处和两偏心距异向分布之差最大处.转角误差较小的区域凸向两曲轴负向分布偏心距误差区域.即当偏心距误差同向负向分布时,有益于提高传动精度.
3.3 曲轴弹性精度分析
曲轴的弹性精度分析,需要考虑曲轴在弹性误差和刚性误差共同作用下的变形.图4即为曲轴在综合情况下的精度分析模型.曲轴在受力的情况下,铰接副处发生了弹性位移.由偏心距(l1+l′11)(l′11为曲轴的刚性变形),铰接副处的弹性位移l11以及等效偏心距l′1构成了一个三角形,由余弦定理可求得等效偏心距l′1为
(13)
曲轴2的情况与曲轴1相同.在分析弹性误差和刚性误差对转角误差的影响时,即可把等效偏心距l′1和l′3带入式(11)进行求解,通过MATLAB绘出其三维图像,如图9所示.

图9 弹性精度下偏心距误差对传动误差的影响三维图Fig.9 3D map of eccentricity error and the transmission error of the accuracy on elastic precision
由图9可知,整个传动误差变化的三维曲面呈漏斗状,为了更加清晰地观察,通过MATLAB绘制了其等高线图,如图10所示.
综合对比图9和图10可知,机构传动误差的变化曲面为明显的中心凹面,转角误差最大的区域分别为两偏心距误差同正最大处和两偏心距异向分布之差最大处.要使转角误差最小,则曲轴1偏心距误差控制在-0.05~0 mm,曲轴2偏心距误差应控制在-0.05~0.05 mm之间.保证两曲轴偏心距误差应在区域①内可以得到较小的输出误差,即获得良好的传动精度.由此可知,在加工曲轴时,将两根曲轴同时加工,可以提高系统的传动精度.
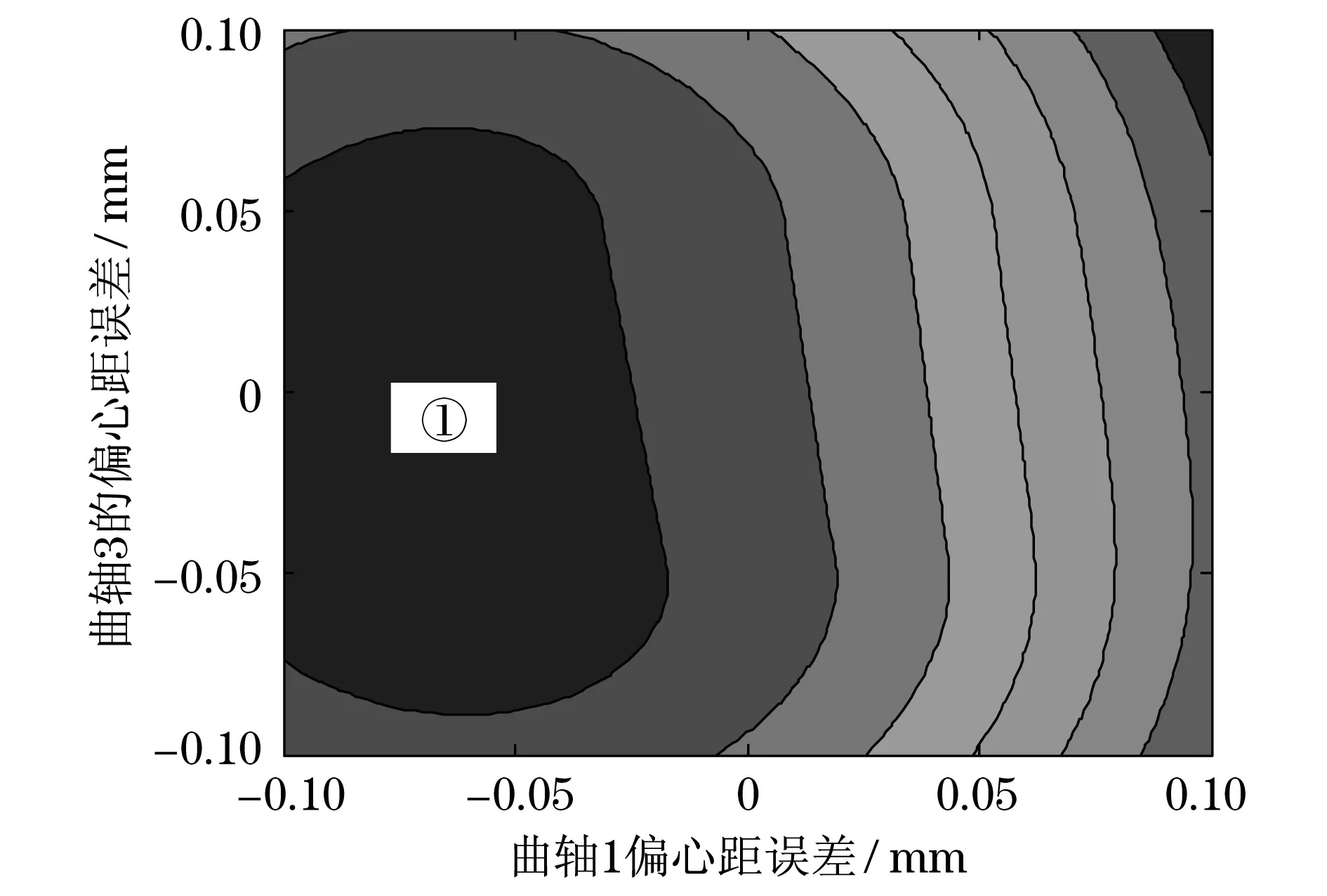
图10 弹性精度下偏心距误差对传动误差的影响等高线图Fig.10 Contour map of eccentricity error and the transmission error of the accuracy on elastic precision
4 结论
(1) 机器人用高精度RV减速器的曲轴对于机构整体传动精度具有较大影响,为了保证RV减速器的传动精度、承载能力、总体回差和传动效率等要求,必须控制曲轴的设计精度,包括其偏心距及其误差.
(2) 分析了曲轴的偏心距及偏心距误差对RV减速器传动精度的影响,建立了曲轴偏心距及其误差影响的数学模型,并通过MATLAB进行了仿真分析.
(3) 本文为研究曲轴偏心距及其误差对整体传动精度的影响提供了理论基础,该研究方法为提高RV减速器的整体传动精度、承载能力、总体回差等性能提供一定的参考.
[1] LAI T S.Design and machining of the epicycloid planet gear of cycloid drives[J].The International Journal of Advanced Manufacturing Technology,2006,28(7):665-670..
[2] BLANCHF J G,YANG D C.Cycloid drives with machining tolerances[J].Journal of Mechanisms,Transmission,and Automation in Design,1989,111(9):337-344.
[3] 郭海军.2K-V型摆线针轮传动的精度分析与仿真研究[D].西安:西北工业大学,2005.
GUO Haijun.Accuracy analysis and simulation of 2K-V cycloid drive[D].Xian:Northwestern Polytechnical University,2005.
[4] 吴永宽,方荣.RV减速机运动精度误差因素及高运动精度工艺保证[J].大连铁道学院学报,1999,20(2):33-36.
WU Yongkuan,HE Weidong.The error factor of RV reducer and the technical guarantee of high motion accuracy[J].Journal of Dalian Railway Institute,1999,20(2):33-36.
[5] 何卫东,姜振波,鲍君华,等.RV传动中曲柄轴的模态分析[J].大连交通大学学报,2011,32(2):28-32.
HE Weidong,JIANG Zhenbo,BAO Junhua,et al.Modal analysis of RV Drive crank [J].Journal of Dalian Jiaotong University.,2011,32(2):28-32.
[6] 李伟,李力行,叶庆泰,等.基于概率理论的RV减速器的传动误差计算[J].机床与液压,2004(1):122-123.
LI Wei,LI Lixing,YE Qingtai,et al.The calculation of RV reducer’s transmission error based on probability theory [J].Hydromechatronics Engineering,2004(1):122-123.
[7] 刘继岩,崔正昀,孙涛.RV减速器传动精度的研究综述[J].天津职业技术师范学院学报,1998(2):1-19.
LIU Jiyan,CUI Zhengjun,SUN Tao.Study on the precision analysis of RV reducer[J].Journal of Tianjin Vocational Technical Teacher’s College,1998(2):1-19.
[8] 日高照晃,王宏猷,石田武,など.サィクロィド齿车を用ぃた K-H-V 形遊星齿车装置の回転传达误差に関する研究(第1报,解析方法)[J].日本机械学会论文集:C编,1994,60(570):645-653.
HIDAKA T,WANG H,ISHIDA T,et al.Rotational transmission error of K-H-V planetary gears with cycloid gear(1st report,analytical method of the rotational transmission error)[J].JSME International Journal:Series C,1994,60(570):645-653.
[9] 杨玉虎,张洁,许立新.RV传动机构精度分析[J].天津大学学报:自然科学与工程技术版,2013,46(7):623-628.
Yang Yuhu,Zhang Jie,Xu Lixin.Precision analysis of RV transmission mechanism[J].Journal of Tianjin University:Science and Technology,2013,46(7):623-628.
[10] 成大先.机械设计手册 [M].第5版.北京:化学工业出版社,2010.
CHENG Daxian.Handbook of Mechanical design [M].5 ed.Beijing:Chemical Industry Press,2010.
Analysis on crankshaft errors for high-precision robotic RV reducer
XI Ying,HUA Bin-bin,ZHENG Yu-xin,BU Wang-hui,LI Meng-ru
(School of Mechanical Engineering,Tongji University,Shanghai 201804)
Due to the manufacturing and assembly errors from crankshafts of high-precision robotic RV reducer,the design precision should be controlled for transmission precision in terms of loading capacity,overall hysteresis and transmission efficiency.By analyzing the crankshaft eccentricity and eccentricity errors on RV reducer precision,related mathematical models are established using MATLABTM simulation.As such,it is indicated from results that the crankshaft eccentricityis especially 1.3mm.In particular,the negative error distributionenhances the precision,whereas the loading reduces the hysteresis clearance.
RV reducer ; crankshaft ; transmission precision; eccentricity error
国家自然科学基金资助项目(51475331),中央高校基本科研业务费专项资金(0800219310,0800219309)
奚 鹰(1957-),男博士,教授.E-mail:yingxi@tongji.edu.cu
TP 242.2
A
1672-5581(2016)02-0168-06
