双目视觉技术在智能机器人中的应用研究
2016-12-10翁和王
翁和王
(武夷学院 数学与计算机学院,福建 武夷山 354300)
双目视觉技术在智能机器人中的应用研究
翁和王
(武夷学院 数学与计算机学院,福建 武夷山 354300)
随着工业自动化的不断发展,生产加工中的自动化水平越来越高,机器人视觉在自动化生产中的地位也越来越重要.其中立体实体技术是智能机器人的重要标志.本文就对双目视觉技术在智能机器人中的应用进行了简单的分析研究.
双目视觉技术;智能机器人;自动化水平
1 引言
一开始引入机器人,只是为了弥补经济高速发展时期的劳动力不足,随着我国经济稳定时期的到来,为了能够适应工业结构的变化,机器人的使用目的也得到了进一步的扩大,不但可以在恶劣环境下进行工作,还有效的减少了人们职业病以及工伤的发生.双目视觉技术不但可以使机器对三维环境中物体的形状、位置以及运动等几何信息进行感知,还可以对他们进行描述、识别、存储以及理解[1].双目立体视觉是计算机中所有被动测量方法中最重要的感知技术,他可以对人类视觉处理景物的技术进行直接模拟,也可以在不同条件下对景物的立体信息进行测量.在计算机视觉方法中,双目立体视觉技术的作用无可替代,同时也是研究人工智能的重要课题,成为了智能机器人技术发展的重要标志.
2 双目视觉机器人的研究现状
双目视觉机器人已在欧美日等发达国家研究了几十年,随着计算机技术、光电学技术的发展,这些发达国家推出了智能化的机器人;相对于发达国家,我国在双目视觉机器人的研究方面起步较晚,对双目视觉技术研究还处于起步阶段,但在一些高校和科研机构也取得了一些成果[2].
2.1 国外研究动态
在美国,麻省理工学院将双目视觉技术应用于智能交通方面,通过雷达和双目视觉系统可以大致的确定目标的大体位置,结合图像分割算法,可以在高速的环境下对获取的目标位置进行检测和处理;华盛顿大学与微软公司合作,为火星卫星“探测者”号研制了宽基线立体视觉系统[3],通过双目视觉技术的应用可以使“探测者”号在数公里的范围内的地形进行实时检测,进行精确定位和导航;美国喷气推进实验室采用双目视觉技术研制出DEMOIII无人自主车.
在日本,东京大学把双目视频技术应用于仿真机器人,通过摄像机拍摄的周边图像利用平面分割算法进行分析和处理,确定路面和障碍物,结合自身姿态形成周边地图,根据实时的地图信息实现仿真机器人在陌生的环境自由的行走;日本大阪大学研究院利用双目视觉技术研制出一种自适应的双目视觉伺服系统,能够对未知目标的运动方式进行预测,实现对目标的自适应跟踪;日本冈山大学利用双目视觉技术研制出控制微操作器的视觉反馈系统.
2.2 国内研究动态
在国内很多高校和研究机构也开展对双目视觉技术的应用研究,火星863计划课题组利用双目视觉技术实现对人体三维尺寸的精确测量,具有测量速度快,精度高的优点;浙江大学采用双目视觉技术实现对多自由度机械装置动态位置的精确检测;东南大学基于双目视觉技术,实现对不规则物体的三维空间进行非接触的精确测量;哈尔滨工业大学采用异构的双目视觉技术实现对自主足球机器人的运动导航[4].
3 双目视觉机器人的工作原理
研究人员花费了大量的经历和时间才依照人类的视觉系统,研究出了一种类似于人眼人造眼,那也就是机器人的视觉系统.机器人视觉研究中有一个最活跃的分支——双目立体视觉,他仿照的是人类以双目视觉线对距离进行感知的方法,以对三维信息进行感知,在实际运用中是基于三角测量的方法,采用两个或者两个以上摄像机从不同位置对同一事物成像,以此从视觉差中对距离信息进行恢复.双目视觉机器人的工作原理如图1所示.
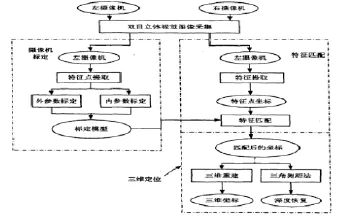
图1 双目视觉机器人的工作原理
下面我们以最简单最理想化的一种双目视觉模型——平行双目视觉系统,将两台摄像机平行的放置在不同的位置,且图像正中正好是摄像机的光心,获取两张同一物体的不同图像,从而可以绘制出简化的双目视觉成像模型,如图2所示.
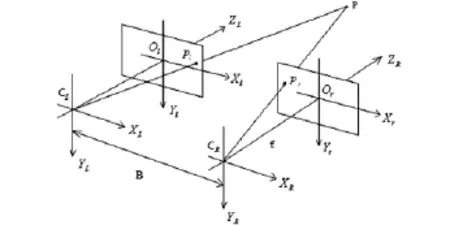
图2 双目视觉成像模型示意图
在图中,假设两台完全相同的摄像机在同一平面上,CL、CR作为左右摄像机的光心,即为坐标系原点,它们对应的XL与XR在同一条直线上,两台摄像机对应的Y轴和Z轴相互平行,两台摄像机的原点CL和CR之间的距离为B,它们成像平面的原点分别是Ol、Or,摄像机到成像位置的距离称了焦距,长度为f.空间点P和OL连接时,与其成像平面的交点为Pl,空间点P和OR连接时,与其成像平面的交点为Pr,在这种理想的结构中,可以很容易的找到Pl、Pr的坐标位置.
在现实中由于各种因素,很难将摄像机摆放到准确的位置,要想让两台摄像机观看到更大的共同区域,就需要将两台摄像机的距离缩小,由于基线距离B减少,影响了数据的精确度.
4 双目视觉技术在智能机器人的应用优势
计算机视觉研究中最基本的内容就是对空间三维场景的距离信息进行获取,目前来说,获取方式主要有两大类:一种是被动视觉,这种方式不需要特殊的光源,只要利用摄像机对物体图像进行摄取,然后借助于计算机对图像进行处理,在视觉差中对三维信息进行恢复即可.这种方式还可以分为单目以及多目视觉,其中单目视觉就是借助于一台摄像机对物体形状进行感知;多目视觉就是在自然光或者一般环境光下,借助于具有一定距离的两台摄像机所各自摄取的图像,把空间物点在两个图像中的对应点找出来,以此来得到点的距离信息.另一种方式也就是主动视觉,这种方式是采用光电感知的方法来对物体之间的距离信息进行感知的,其中方法很多,有飞点时间法、莫尔技术法以及主动式光学三角测量法等[5],这种方式最关键的部分就是需要特殊的光源,并要对光源的位置以及亮度进行严格的控制.所以说计算机的视觉方法很多,同样不同方法的适用范围也不同,以上两大类中主动视觉的测量精度比较高,但是必须具备特殊光源,所以其设备成本比较高,适用范围也相对比较小;被动视觉中单目视觉只能够对三维物体的表面朝向恢复,如果想要获得物体的三维结构,就要从不同的方向进行多次测量,所以其测量误差比较大.综上所述,双目视觉也就是对机器人视觉研究的最佳选择,其优势主要有:
(1)价格比较便宜,机器人双目视觉系统不需要昂贵的设备,所需要的硬件组成也比较简单;(2)结果精确度较高,经过相关研究可知,双目视觉系统计算结果的绝对误差达到0.3mm[6],可以对机器人目标定位的精确度要求完全满足;(3)不需要特殊光源,可进行广泛使用.
5 双目视觉系统在智能机器人应用中的关键技术
双目视觉系统在智能机器人应用中的关键技术,也就是一个完整双目立体视觉系统中的六个主要内容:(1)获取图像,立体图像的获取主要利用的就是摄像机,就是摄像机所摄取的3-D物体的2-D图像,这是立体视觉中基础条件.对对其获取图像质量产生影响的因素主要有拍摄位置、摄像机几何特征以及光照条件等,所以所在对图像进行获取的时候,不但要对应用要求进行满足,也要对视点差异、摄像机性能以及光照条件等因素进行考虑,以便有利于进行立体计算.(2)摄像机标定,从摄像机的图像信息中可以得知三维物体的位置、形状以及几何信息.为了能够获取到空间点和图像像素点之间的对应关系,就必须对摄像机进行标定,其目的就是要建立一个有效的摄像机成像模型,对摄像机的内外属性参数进行确定,对空间点和像素点之间的对应关系进行正确确定.(3)提取特征,选取合适的图像特征,有利于对同一场景中同一物体在两幅不同位置所摄取的图像中的对应关系进行匹配,到目前为止,对于图像特征的选取还没有一种普遍适用的理论,从而导致了匹配特征多样性的出现.一般情况下所采用的匹配特征主要有:点状特征、现状特征以及区域特征等.通常情况下,大尺度特征中的图像信息比较丰富,数目也比较多,比较容易匹配,但是定位精确度比较差,特征的描述以及提取都比较困难;而小尺度特征中的图像信息比较少,数目比较多,所以就需要一个较强的约束准则以及匹配策略进行匹配,以对歧义匹配进行克服,并提高运算效率.一个良好的匹配特征应该具有一定可区分性、稳定性、唯一性、不变形以及有效解决歧义匹配能力.(4)立体匹配,就是对所选取的特征进行计算,以对特征间的对应关系进行建立,把同一空间物理点在不同图像中的映射点找出来,以此得到视差图像,这是双目视觉技术中最困难的问题.把空间中的三维物体投影成2-D图像,在不同视点下的同一景物图像会发生很大的变化,另外还要受到场景中光照条件、景物几何特征以及噪声干扰等多种因素的影响,所以说想要进行准确的计算,就必须对这些因素的干扰进行排除.(5)深度恢复,得到立体成像模型以及匹配视差之后,就可以很容易的把安慰距离进行恢复,对其测量距离产生影响的因素主要有:摄像机标定误差、匹配定位误差以及特征检测,只要对各个方面的因素进行综合考虑,就可以得到一个比较精确的距离恢复.(6)修正误差,在对立体进行匹配的时候会受到一系列因素的影响,所以肯定会产生一定的误差,可以根据误差产生的原因以及方式,选取合理的手段对误差进行修正[7].
6 结语
双目视觉技术具有非常广阔的应用前景,在机器人中的应用,可以有效的提高其智能化,但是目前来说,对于这一技术的研究我国仍然处于初级阶段,想要对这一技术进行充分的应用,就必须进行深入研究.
〔1〕基于双目视觉的汽车安全驾驶系统[J].电脑与电信,2012,(8):33-33.
〔2〕李庆忠,陈显华,顾伟康.基于彩色立体视觉的障碍物快速检测方法.计算机科学,2003(9):9.
〔3〕C.F.Olson, H.Abi-Rached, M.Ye, et al.Wide-Baseline Stereo Vision for Mars Rovers.In:IEEE International Conference on Intelligent Robots and Systems.Las Vegas,NV,U-nited States.2003.USA:Institute of Electrical and Electronics Engineers Inc,2003.27~31.
〔4〕高庆吉,洪炳熔,阮玉峰.基于异构双目视觉的全自主足球机器人导航[J].哈尔滨工业大学学报,2003,35(9):1029-1032.
〔5〕付国强,黄攀峰,陈凯,等.基于双目视觉的伺服控制半物理仿真系统设计[J].计算机测量与控制, 2009,17(12):2494-2496.
〔6〕张洋,王新龙.一种地标点修正的高精度双目视觉导航方法[J].北京航空航天大学学报,2014,40 (9):1305-1311.
〔7〕刘军,李娜,刘鹏,等.双目视觉立体标定方法的改进[J].武汉工程大学学报,2013,35(10):68-73.
TP242.6
A
1673-260X(2016)11-0022-03
2016-06-13