基于风险收益平衡的驾驶员停止/通过决策行为
2016-12-08唐克双狄德仕李克平
唐克双, 周 楠, 狄德仕, 李克平
(1.同济大学 道路与交通工程教育部重点实验室,上海 201804;2.广州市城市规划勘测设计研究院,广东 广州 510060)
基于风险收益平衡的驾驶员停止/通过决策行为
唐克双1, 周 楠1, 狄德仕2, 李克平1
(1.同济大学 道路与交通工程教育部重点实验室,上海 201804;2.广州市城市规划勘测设计研究院,广东 广州 510060)
通过在上海市6个信号控制交叉口采集的数据,基于风险平衡理论和随机效用理论,建立了驾驶员停止/通过决策行为模型.研究表明,驾驶员停止/通过决策行为受红灯时长的影响显著,并具有在交通冲突风险和时间收益之间的博弈特征.小汽车驾驶员在距离交叉口时间和等待红灯时间之间的权衡比重约为180∶1;大型车辆驾驶员比小型车辆驾驶员的停止/通过行为更加激进,市区比郊区的停止/通过行为更加激进;激进的驾驶行为会显著增加严重交通冲突发生的概率.
信号控制交叉口; 停止/通过行为; 相位切换; 风险平衡理论; 随机效用理论
信号控制交叉口是交通事故的多发地点,也是城市路网的常见瓶颈,其运行直接影响着整个城市路网的交通效率和安全[1].国内外研究结果均表明,机动车驾驶员的危险感知和决策行为与信号控制交叉口交通事故的发生概率密切相关,例如美国每年交叉口处交通事故96%与驾驶员有直接联系[2-3].因此,深度解析驾驶员在面临交通冲突时的驾驶行为决策规律,对于改善交叉口运行效率和安全具有重要的意义.研究表明,我国信号控制交叉口90%的交通事故发生在信号相位切换阶段[4].因此,解析驾驶员在信号相位切换期间的停止/通过决策行为规律显得尤其重要.
国内外针对驾驶行为的研究一般都是基于驾驶行为模型展开的.20世纪60年代开始,研究者将心理模型应用于驾驶行为分析.国内外现有的驾驶行为心理模型主要分为4类:描述性模型、信息处理模型、动机模型、理性与感觉模型[5],这些驾驶心理模型主要是从心理学和社会学的角度,定性地分析驾驶行为的分类、特征、决策机制或动机等,缺少对现实环境下驾驶行为的定量实证分析.国内针对驾驶行为的研究起步较晚,主要集中在车辆跟驰模型、车辆换道模型以及用于车辆辅助驾驶系统的认知行为建模[6].
在交通工程领域,通过交通事故数据或者驾驶行为实证数据来分析驾驶员停止/通过决策行为及其对于交叉口运行安全和效率影响的研究较多.其中,美国NCHRP3-95项目的推出,引发了大量关于观测和分析停止/通过行为关键行为参数的研究,主要集中于3个关键参数:驾驶员认知反应时间(perception-reaction time,PRT)、减速度和进口道车速.据调查,平均PRT值约为1.0~1.9 s,车辆平均减速度集中于2.1~4.2 m·s-2[7-10].另外还有两类停止/通过行为的研究,其中一类注重对停止/通过行为的影响因素的论证,如驾驶员性别、驾龄、道路坡度、电话分心、有无安装倒计时信号灯等[11-15].另外一类研究集中于探索描述该行为的数学方法或模型,如K最近邻(K-nearest neighbor,KNN)分类算法、隐马尔科夫链模型、AdaBoost算法(对同一个训练集训练不同的分类器,再将这些分类器集合起来,构成一个更强的最终分类器的一种迭代算法)、基于Agent的驾驶行为模型(结合计算机科学和人工智能的一种模拟驾驶员认知行为的建模方法)、巢式Logit模型和二元Logistic模型等[16-20].
综上所述,国内外学者针对停止/通过行为研究,主要集中于关键驾驶行为参数的提取及其对交通流运行效率和安全的影响评价,未能从驾驶员时间收益和交通冲突风险之间博弈的角度,定量地解析驾驶员决策行为规律.定量解析驾驶员的风险收益博弈特征可以建立交叉口信号配时参数与交通冲突风险之间的定量换算关系,从而用于交通信号配时优化和交通安全改善方案评价的量化分析,为更准确的交叉口运行效率和安全分析与评价提供支撑.同时,驾驶员的风险收益系数也可用于微观仿真软件中驾驶员停止通过决策行为模型以及智能驾驶辅助系统中驾驶员决策模型的参数标定,有助于提高交叉口运行效率与安全.
在此背景下,本文基于风险平衡理论和效用理论,建立基于风险收益平衡的驾驶员决策行为模型,提出驾驶员群体的“风险收益比”概念,用以表征驾驶员为了一定的时间收益而愿承担的驾驶风险,并利用实地采集的大量数据作实证分析.此外,分析了不同车型和不同区域位置之间该驾驶行为的特征差异.最后,介绍了驾驶行为激进程度对交叉口运行安全的影响,为今后交叉口管控、交通仿真模型优化等工作提供理论支撑和技术支持.
1 理论基础及方法
1.1 理论基础
本研究中构建的模型主要基于以下两种行为理论:风险平衡理论(risk homeostasis theory,RHT)和随机效用理论(utility theory,UT).
RHT于1970年代由Wilde提出,该理论虽主要用于探讨驾驶员决策行为的心理规律,但几乎适用于人们面临风险时的所有决策行为[16].该理论认为,人们所感受到的风险水平会尽量趋近于内心所期望的目标风险水平.两者一旦出现较大的差异,驾驶员则会决策出一系列的驾驶操作行为使二者恢复大致一致的状态,从而达到一种动态的“平衡”.其外在表现之一便是驾驶员为了节省出行时间而牺牲一定程度的驾驶安全.根据RHT,驾驶员群体的行为特征具有不均质性,即每个驾驶员具有不同的风险接受水平.
当前随机效用理论尤其是线形效用理论基本上源于Von Neumann的理论框架[21].在可支配资源的约束下,决策人会做出使自身需求得到最大限度满足的决策结果即效用最大化原则.而驾驶安全和出行时间是影响驾驶员行为最重要的两类因素,驾驶行为基本可视为是安全效用和时间效用的综合效用值最大化的外在体现.
1.2 模型形式
Marschark证明了Logit模型与最大效用理论的一致性.考虑到决策结果的二元性,结合风险平衡理论确定安全效用指标和时间效用指标,可建立相应的二元Logistic模型.
基于如上论述,驾驶员在决策行为中感受到的综合效用值可表达如下:
(1)
(2)
式(1),(2)中:Ui为驾驶员i所感知的综合效用;Vi为对应的能够从外部测知的综合效用;εi为随机误差;x1和x2分别为安全效用变量和时间效率效用变量;αi,β1i和β2i均为驾驶员i效用模型的常量系数.
在特定的x1和x2所代表的驾驶环境下,驾驶员决策通过交叉口的概率可表达为
(3)
模型中x1和x2的系数,即β1和β2,能够间接地反应驾驶员在间隙选择行为和停止/通过行为决策过程中对安全考虑和时间效率追求两方面的权衡比例关系,定义为风险收益比H为
(4)
H表征驾驶员(群体)风险行为激进程度,表示驾驶员为了获得一定时间收益而愿意牺牲的驾驶安全程度.根据RHT,驾驶员群体的行为特征具有不均质性,即每个驾驶员具有不同的H值.
1.3 模型变量选取
1.3.1 安全效用指标
停止/通过行为的安全考虑主要包括两个方面:①闯红灯的可能性;②进入交叉口后与下一相位车辆之间的冲突.由于信号方案中绿闪时长和黄灯时长为固定值,故闯红灯的可能性可通过车辆匀速行驶到达停车线的理论所需时间(time-to-intersection,TTI)来表示,即
(5)
式中:D为绿闪(黄灯)亮起时刻决策车辆与停车线之间的距离,m;v为相应时刻决策车辆的行驶速度,m·s-1.
而进入交叉口后与下一相位车辆之间的冲突程度一般用后遭遇时间(post encroach time,PET)来表示.记车辆匀速到达与下一相位车辆之间冲突点的理论所需时间为T1,下一相位车辆匀加速行驶至冲突点的所需时间为T2,则有
(6)
(7)

因此,冲突指标后遭遇时间可由下式计算:
(8)
式中:GF为绿闪时间长度,s;Y为黄灯时长,s;RC为全红时间,s.
1.3.2 时间效用指标
时间效率主要体现在驾驶员若停车则需等待的红灯时长方面,也是驾驶员若决策通过交叉口能够避免的等待时间.
红灯时长可直接测得,也可由下式:
(9)
式中:R为决策车辆即将面临的红灯时长,s;C为交叉口信号配时周期,s;Gp为决策车辆具有通行权的绿灯时长,s.
1.3.3 交叉口运行安全分析
不当的停止/通过行为容易造成车辆与下一相位车辆间的冲撞或者本车道内的追尾事故,而驾驶行为的激进程度在此过程中起重要作用.
将式(6)与式(7)代入式(8),可得
(10)
由式(10)可见,针对特定的进入车辆,除tTTI外,其余变量均可视为保持不变.
由于本文定义的风险收益比H值代表着驾驶员在等待红灯时长和tTTI之间的换算比,故特定的红灯时长下,驾驶员倾向于接受的tTTI增大量如下:
(11)
因此,据式(11)分析得到的不同H值下驾驶员倾向于接受的tTTI增加量的绝对值,便可得到不同H值下tTTI增加量的相对值,结合式(10)便可完成使用tPET指标的交叉口运行安全分析.
2 数据采集
2.1 地点描述
数据采集方式为实地视频录像结合视频处理软件,主要采集于上海市6个交叉口.6个交叉口的概况、研究交通流向的选取及录像角度情况如图1和表1所示.

a 剑河路仙霞西路交叉口

b 仁德路吉浦路交叉口
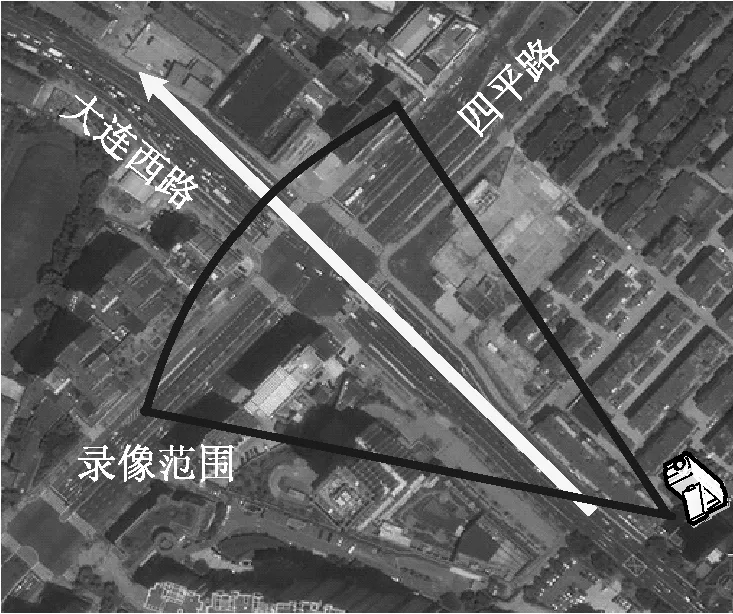
c 四平路大连路交叉口
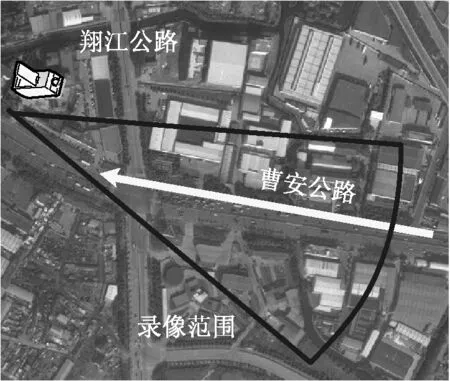
d 曹安公路翔江路交叉口
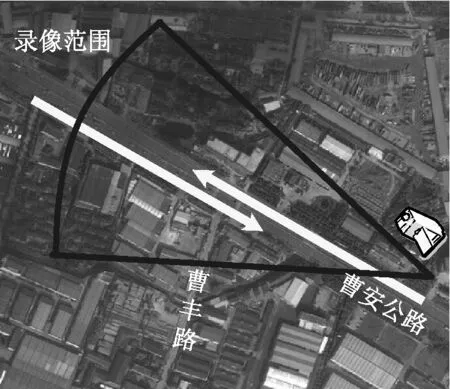
e 曹安公路曹丰路交叉口
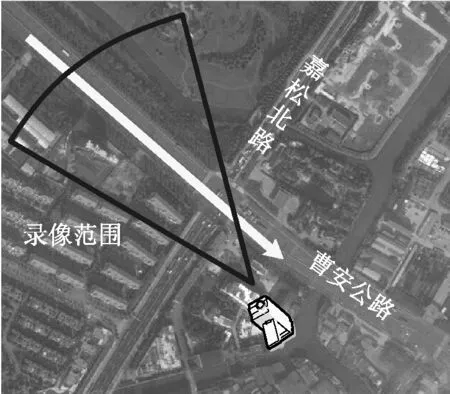
f 曹安公路嘉松北路交叉口
图1 数据采集的交叉口进口道
Fig.1 Observed intersection approaches
(1)仅选取绿闪亮起时刻该车道内的头车.由于数据采集交叉口均为绿闪加黄灯的信号切换方式,则绿闪亮起时刻即驾驶员的决策时刻.另外,非头车驾驶员会受到跟驰行为的影响.
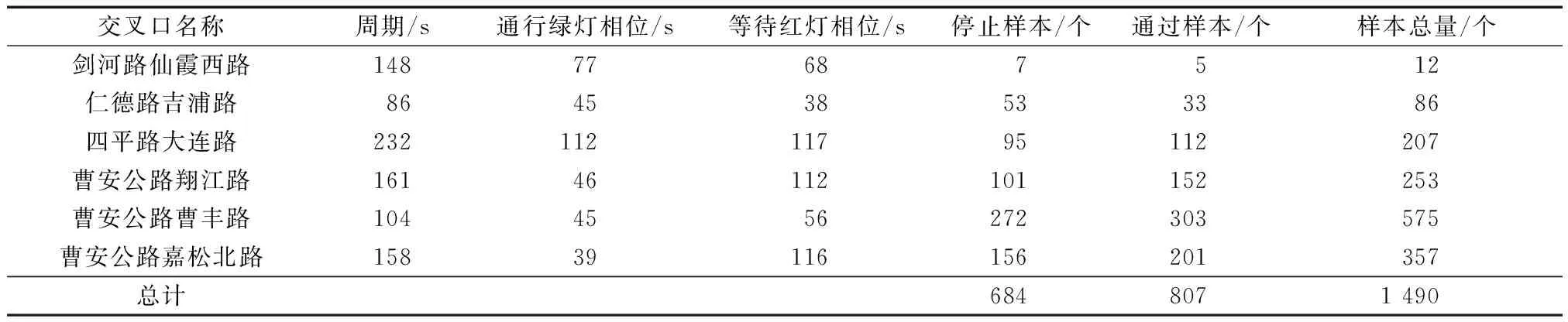
表1 数据采集流向的红绿灯时间和数据样本量
(2)为对比不同车型的车辆在停止/通过行为方面的特征差异,故选取小汽车和大型车辆两种车型作为研究对象.
2.2 数据样本量
如图2所示,使用视频处理软件George2.1可以0.12 s的时间精度直接提取车辆的横纵坐标位置、横纵向速度及合速度、横纵向加速度及合加速度等车辆行驶数据及对应的视频时刻,同时,可记录车辆编号、车型、决策结果、红灯时长等信息,并可通过提取绿闪时刻车辆与停车线的距离D和车速v,以计算车辆到达停车线的“理论所需时间”.最终数据样本量如表1所示.数据按车辆类型和交叉口区位分类情况如表2所示.
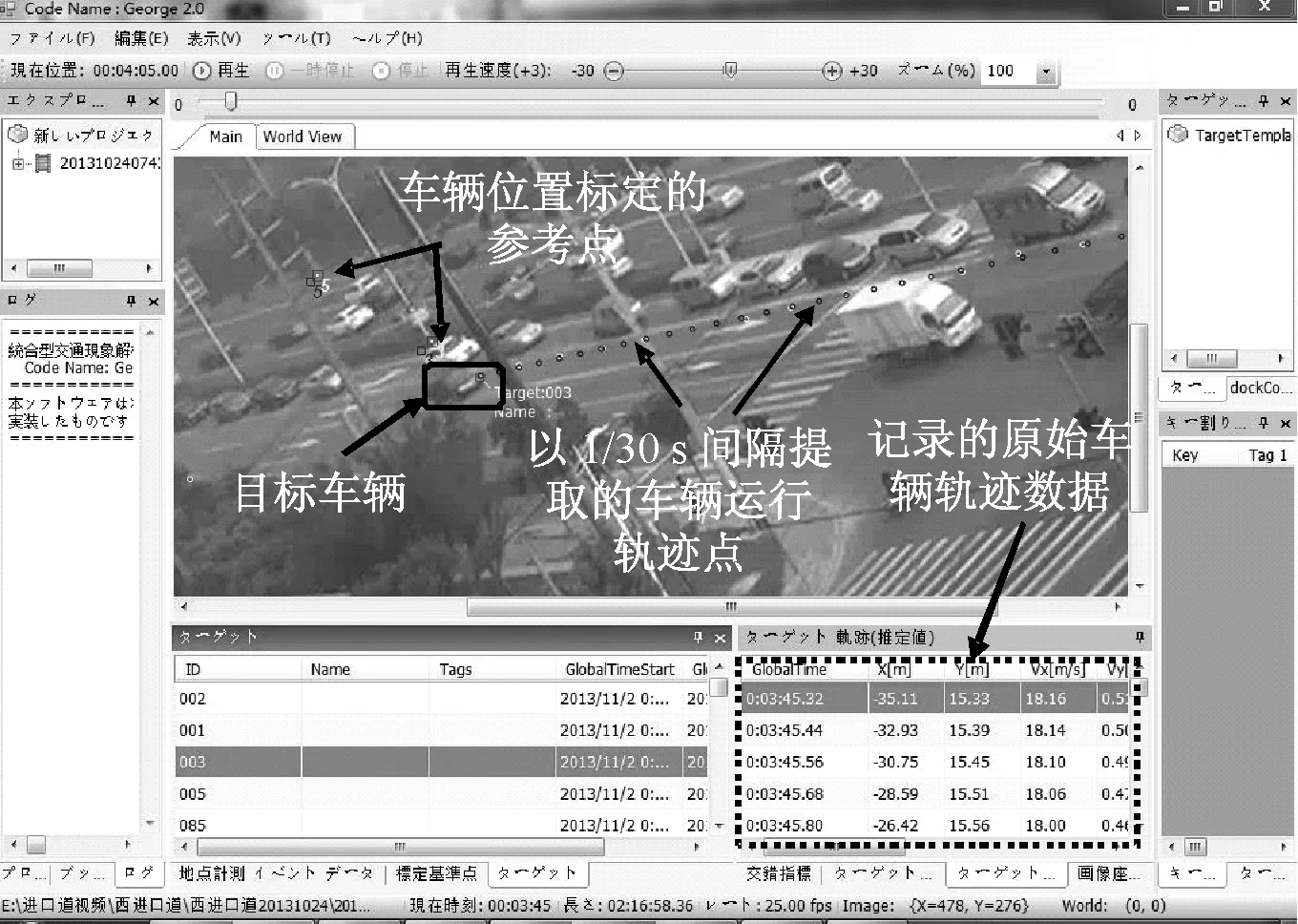
图2 视频处理软件界面图
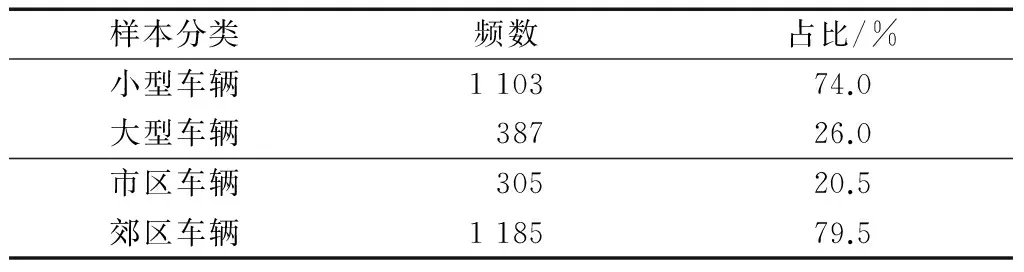
样本分类频数占比/%小型车辆110374.0大型车辆38726.0市区车辆30520.5郊区车辆118579.5
2.3 数据特征初步分析
绿闪时刻驾驶员决策是否需要通过交叉口,而车辆与停车线之间的距离和当前的车速对决策结果影响较大,二者的分布情况如图3和图4所示.
不同TTI水平下驾驶员决策通过交叉口的比例如图5所示.由图5可知,当tTTI约为5 s时,驾驶员决策通过交叉口的占比为一半左右,即驾驶员决策通过交叉口与停车等待的比例接近相等.
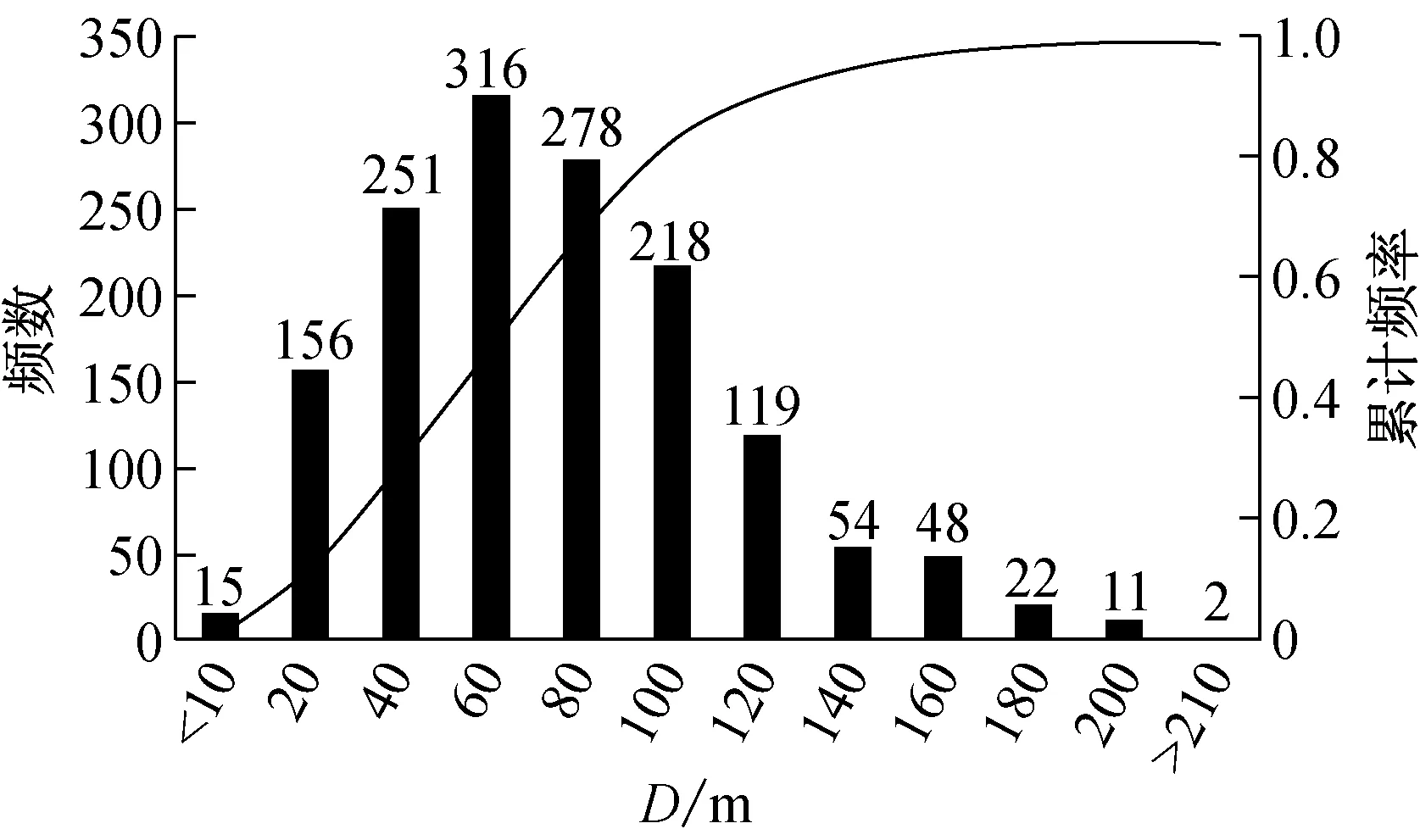
图3 绿闪启亮时到停车线的距离分布
Fig.3 Distribution of distance to intersection at the start of flashing green light
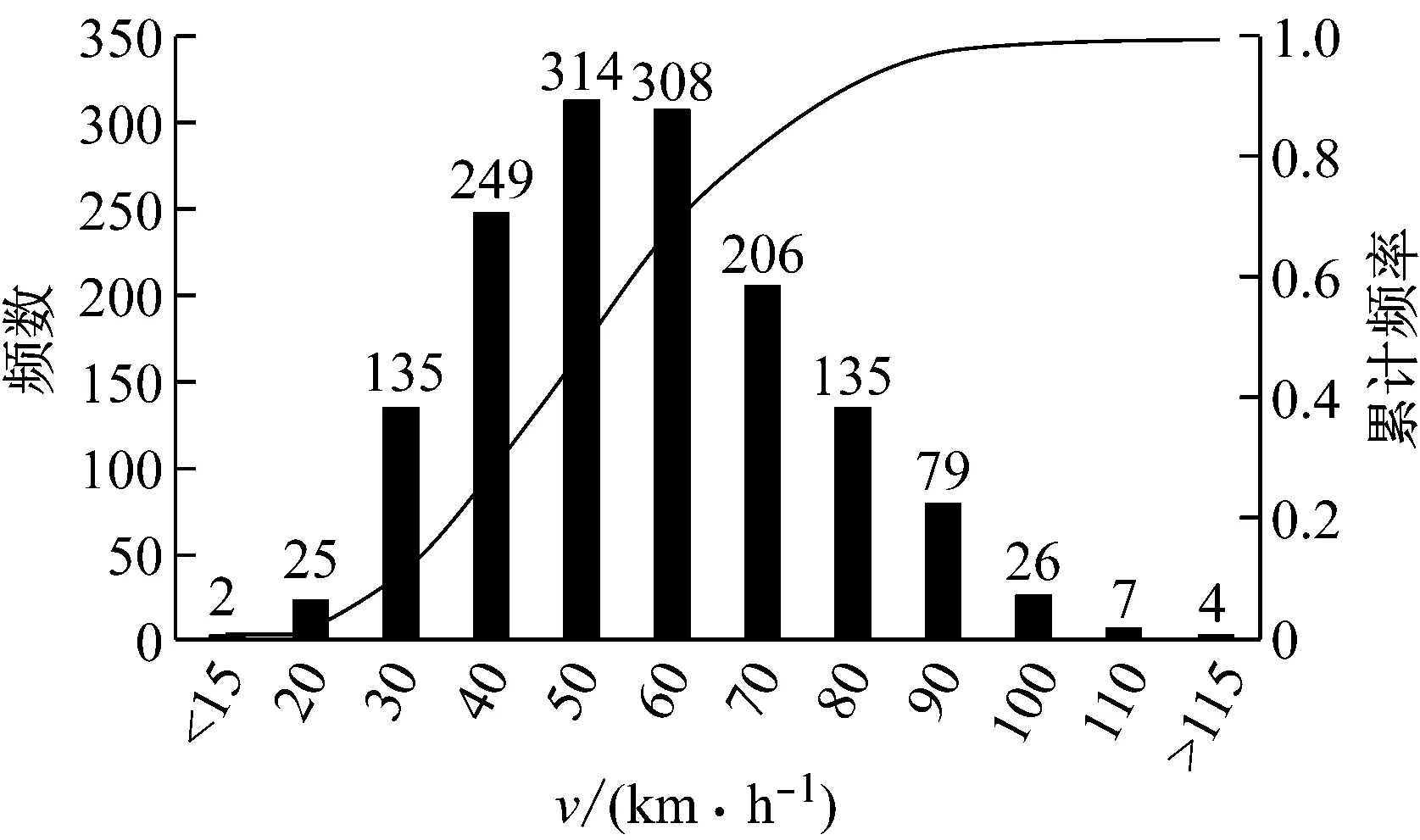
图4 绿闪启亮时的车速分布
Fig.4 Distribution of velocity at the start of flashing green light

图5 不同tTTI水平下驾驶员决策通过交叉口比例
3 驾驶员风险收益平衡模型
3.1 模型建立
为验证车辆与停车线之间的距离影响因素的显著性,并探索驾驶员在闯红灯风险和时间收益之间的决策规律,建立以下模型:
(12)
式中:a0为模型中的常数,a1,a2分别为到达停车线的理论所需时间tTTI和红灯时长R的系数.
通过统计软件SPSS对采集的实证数据作二元Logistic模型回归分析,各模型的输出结果见表3.
如表3所示,估计准确率均大于80%,模型精度虽处于可接受的范围,但是依然存在较大误差.误差的原因主要来源于驾驶员对于等待红灯时长感知的误差以及驾驶员个人属性的差异等.从表2中R的显著性水平可知,红灯时长对驾驶员的停止/通过决策行为有较为明显的影响.决策行为中驾驶员主要在驾驶安全和时间收益两者之间作博弈判断:一方面,在可用通行时间和仍需通行时间之间作对比,从而估判出闯红灯的可能性以及进入交叉口后与下一相位通行车辆之间的冲突程度;另一方面,驾驶员依据驾驶经验预估出若停车等待则需等待的红灯时长.
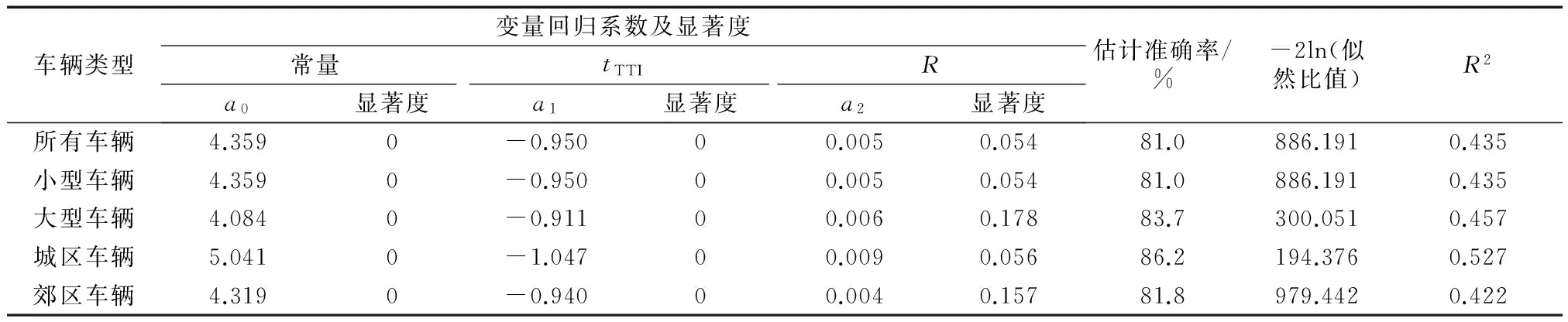
表3 停止/通过行为模型输出结果
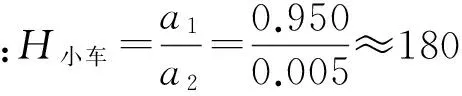
根据式(4),本模型的风险收益比H为
停止/通过行为中的风险收益比H可以从以下两个角度来解释:
(1)当驾驶员停车需等待的红灯时长大约为180 s时,驾驶员更倾向于接受一个比原来大1 s的到达停车线的理论所需时间.
(2)当驾驶员停车时面临的红灯时长大约为180 s时,若到达停车线的理论所需时间比原来长1 s,则驾驶员决策通过交叉口的概率与原本情况下决策通过交叉口的概率相同.
3.2 驾驶员决策行为规律分析
3.2.1 停止/通过行为对红灯时长的敏感性分析
选取tTTI为别为1,3,5,7和9 s,令红灯时长R从40 s增加140 s,则驾驶员群体决策通过交叉口概率的变化趋势如图6所示.图6表明,一定的tTTI时,红灯时长越长,驾驶员决策通过交叉口的概率会越高.这体现出驾驶员在时间收益的刺激下提升了内心的“期望风险水平”.并且,一定的红灯时长时,tTTI越小,驾驶员决策通过交叉口的概率明显越大.这对应于风险平衡理论中的“当驾驶员的感受风险小于其期望风险水平时,便会尽量消除二者之间的差异”,即tTTI越小,则越利于安全顺畅通过交叉口,进而驾驶员会更加倾向于做出通过交叉口的决策结果.同时,当tTTI在5 s附近时驾驶员对红灯时长最为敏感.

图6 停止/通过行为对红灯时长的敏感性分析
Fig.6 Sensitivity analysis of “stop/go” behavior to time of red light
3.2.2 停止/通过行为对tTTI的敏感性分析
分别取红灯值为40,65,90,115和140 s,令tTTI从0 s增加至10 s,则驾驶员决策通过交叉口概率的变化趋势如图7所示.
驾驶员决策通过交叉口的概率受tTTI的影响基本呈反“S”型,且其影响主要体现在两个方面:一方面,驾驶员对较小(小于3 s)和较大(大于7 s)的tTTI敏感性较低,对3~7 s之间的tTTI敏感性较高,这主要体现在图中曲线的斜率变化上,即当影响因素处于其自身的临界值时对决策结果的影响最为明显;另一方面,红灯时长因素也是在当tTTI处于5 s附近时对停止/通过行为的影响最为明显,这一趋势与图6保持一致.
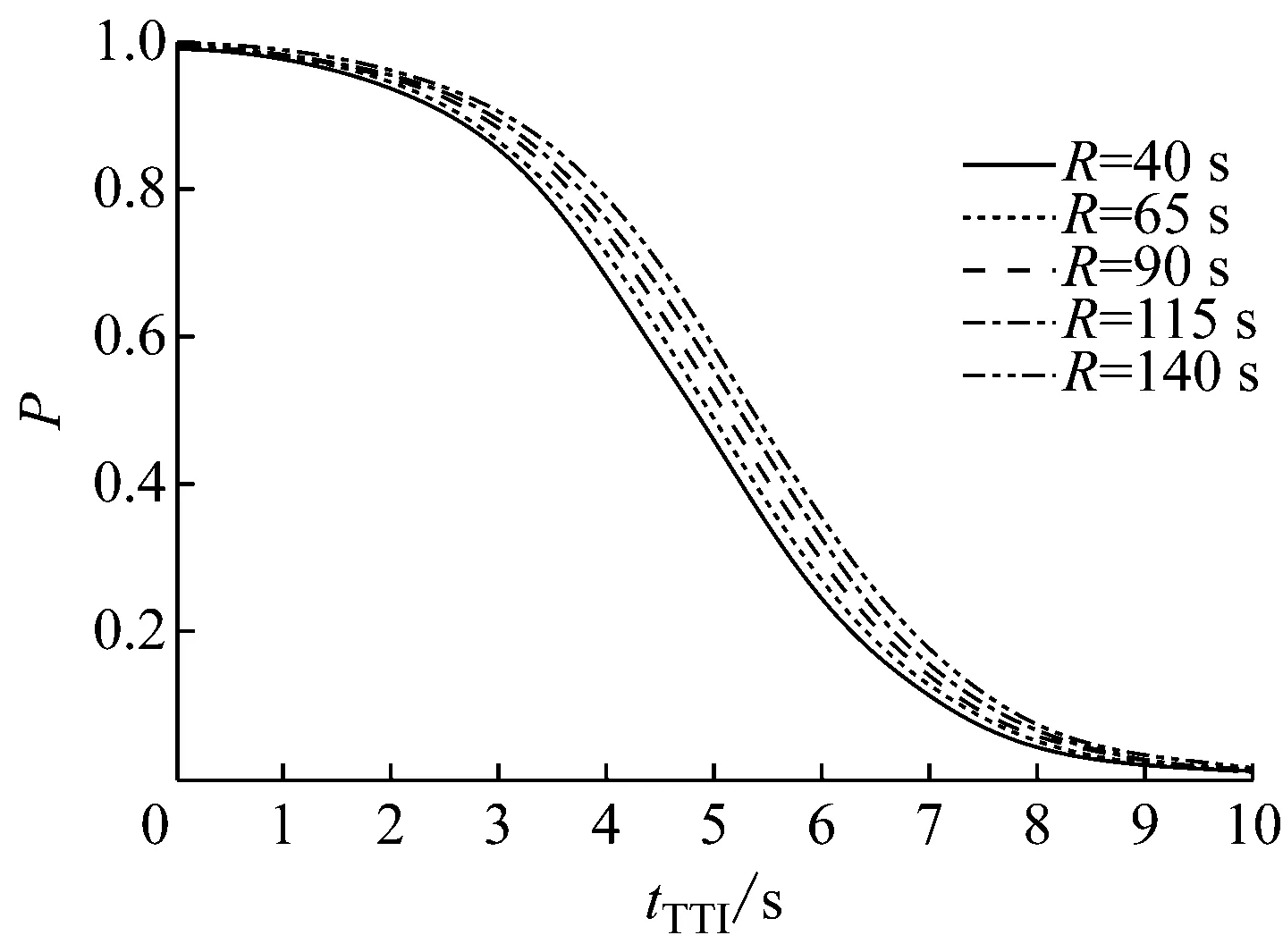
图7 停止/通过行为对tTTI的敏感性分析
4 模型结果应用
4.1 不同车型对比
由表3可知,小型车辆和大型车辆之间的停止通过驾驶行为之间有以下特征区别:
(1)红灯时长对小型车辆的影响比对大型车辆的影响更加显著.
(2)大型车辆样本下模型的估计准确率一般高于小型车辆样本的该指标值,表明小型车辆驾驶员的决策行为特征更加离散一些.
(3)不同车型的风险收益比为
由于H值越小代表驾驶员行为越激进.因此,由两类车型下H值的对比可知,大型车辆驾驶员在停止/通过行为中表现的更加激进一些.
4.2 不同城市区域对比
由于出行目的、交通量及道路限速等因素的差异,不同地区之间的驾驶行为也会有一定的区别.
使用城区和郊区的实证数据分别对驾驶员的停止/通过行为建模,输出结果如表3所示.
由表3可知,城区车辆与郊区车辆之间的停止/通过行为有以下特征区别:
(1)红灯时长对市区车辆停止/通过驾驶行为的影响比对郊区车辆的影响更加显著.
(2)市区车辆样本下模型的估计准确率一般高于郊区车辆样本下的该指标值,表明郊区车辆驾驶员的决策行为特征更加离散一些.
(3)不同城市区域的风险收益比为
由于H值越小代表驾驶行为越激进,进而可知市区车辆驾驶员在停止/通过行为中表现的更加激进一些,即更倾向于在绿闪期间通过交叉口.
4.3 交叉口冲突概率分布

图8 四平路大连路停止/通过行为安全性分析
利用公式(11)计算出不同驾驶行为激进程度下驾驶员倾向于接受的tTTI的增大量的绝对值,并以实证数据代表的180的“风险收益比”水平为基准作相对化处理,如表4所示.

表4 不同驾驶行为激进程度下tTTI变化量
结合公式(10)推测出不同驾驶行为激进程度下tPET分布规律的变化,如图9所示.

图9 不同驾驶行为激进程度下tPET频数和累计频率变化
Fig.9 Frequency and cumulative percentage variation oftPET
图9中,当H增大时,图中较小tPET的左侧区域各区间的频数呈下降趋势,较大tPET的右侧区域各区间的频数呈上升趋势.即随着H的增大,较小tPET的频数会减少,而较大的tPET会增大.表明随着驾驶行为激进程度的下降,交通运行安全有一定的提高.图9还展示了不同激进程度下PET累计频率的变化趋势,主要有两方面的特征:一方面,tPET的累计频率分布曲线基本呈“S”型,两侧的变化速度较慢,而中间部分上升速度较快;另一方面,H同样增加和减小60的情况下给驾驶员决策通过交叉口概率的影响程度却不相同.从图9中可明显看出,当H减小60时给驾驶员决策通过交叉口概率的影响较大.这表明了风险收益比H值影响程度的不均匀性,即风险收益比H值减小一定的量,比增加相同的量给决策行为造成的影响更加明显.
5 结语
本研究通过理论分析和实证研究相结合的方法,提出并验证了信号交叉口处驾驶员停止/通过决策行为在驾驶安全和时间收益之间的博弈性特征.在深入解析驾驶员决策规律的基础上,对比分析了不同车型和不同城市区域的停止/通过行为的特征差异,并探讨了驾驶行为激进程度对交叉口运行安全的影响.
但是,由于观测条件的限制,本研究未能获取驾驶员的个人属性信息,并将其作为自变量纳入驾驶员停止/通过决策模型,对模型预测精度产生了一定的影响.后续研究可通过驾驶模拟器和问卷调查的方法,分析不同属性驾驶员在停止/通过决策过程中的风险收益博弈特征,提高模型预测精度.
[1] 潘福全,项乔君,陆键,等.公路平面交叉口驾驶行为研究[J]. 道路交通与安全,2007, 7(5):16.
PAN Fuquan, XIANG Qiaojun, LU Jian,etal. Research on driving behavior at highway intersection[J]. Road Traffic & Safety, 2007, 7(5): 16.
[2] 张恩亮,肖贵平,聂磊. 交通环境对驾驶员心理的影响分析及对策研究[J]. 公路交通科技,2006(11):164.
ZHANG Enliang, XIAO Guiping, NIE Lei. Analysis and research on the impact of traffic environment on the driver psychology[J]. Road Traffic Technology, 2006(11): 164.
[3] Choi Eunha. Crash factors in intersection-related crashes: an on-scene perspective[C/CD]∥Transportation Research Board 89th Annual Meeting. Washington D C: Transportation Research Board, 2010.
[4] 钱红波, 李克平. 绿灯间隔时间对交叉口交通安全的影响研究[J]. 中国安全科学学报,2008,18(6):166.
QIAN Hongbo, LI Keping. Study on the influence of green traffic light intervals on the crossing traffic[J]. China Safety Science Journal, 2008, 18(6):166.
[5] 段冀阳,李志忠. 驾驶行为模型的研究进展[J]. 中国安全科学学报, 2012,22(2):30.
DUAN Jiyang, LI Zhizhong. A review on driving behavior models[J]. China Safety Science Journal, 2012, 22(2):30.
[6] 闫学东,李晓梦. 基于驾驶模拟实验的层级式驾驶行为安全模型研究综述[J]. 交通信息与安全,2014,32(5):1.
YAN Xuedong, LI Xiaomeng. A hierarchical driving performance assessment model for driving simulator-based studies[J]. Journal of Transport Information and Safety, 2014, 32(5):1.
[7] Gates T J, McGee H, Moriarty K,etal. Comprehensive evaluation of driver behavior to establish parameters for timing of yellow change and red clearance intervals[J]. Transportation Research Record: Journal of the Transportation Research Board, 2012, 2298(1): 9.
[8] Taoka G T. Brake reaction times of un-alerted drivers[J]. ITE Journal, 1989, 59(3): 19.
[9] Parsonson P S. Evaluation of driver behavior at signalized intersections[J]. Transportation Research Record: Journal of the Transportation Research Board, 1983, 904:10.
[10] Tang K, Xu Y, Wang P,etal. Impacts of flashing green on dilemma zone behavior at high-speed intersections: empirical study in China[J]. Journal of Transportation Engineering, 2015, 141(7): 1943.
[11] El-Shawarby I, Abdel-Salam A S G, Li H,etal. Driver behavior at the onset of yellow indication for rainy/wet roadway surface conditions[C/CD]∥Transportation Research Board 91st Annual Meeting. Washington D C: Transportation Research Board, 2012.
[12] Ohlhauser A D, Boyle L N, Marshall D,etal. Drivers’ behavior through a yellow light effects of distraction and age[C]∥Proceedings of the Human Factors and Ergonomics Society Annual Meeting. Las Vegas: Sage Publications, 2011, 55(1): 1919-1923.
[13] El-Shawarby I, Abdel-Salam A S G, Rakha H. Evaluation of driver perception-reaction time under rainy or wet roadway conditions at onset of yellow indication[J]. Transportation Research Record: Journal of the Transportation Research Board, 2013, 2384(1): 18.
[14] Limanond T, Prabjabok P, Tippayawong K. Exploring impacts of countdown timers on traffic operations and driver behavior at a signalized intersection in Bangkok[J]. Transport Policy, 2010, 17(6): 420.
[15] 曹弋,杨忠振,左忠义. 绿灯倒计时信号对驾驶行为的影响[J]. 中国安全科学学报,2015,25(2):77.
CAO Yi, YANG Zhongzhen, ZUO Zhongyi. Influence of countdown signal of green light on driving behavior[J]. China Safety Science Journal, 2015, 25(2):77.
[16] Elhenawy M, Rakha H, El-Shawarby I. Enhancing driver stop/run modeling at the onset of a yellow indication using historical behavior and machine learning techniques[C/CD]∥Transportation Research Board 93rd Annual Meeting. Washington D C: Transportation Research Board, 2014.
[17] Tang K, Zhu S, Xu Y,etal. Analytical modeling of dynamic decision-making behavior of drivers during the phase transition period based on a hidden Markov model[C/CD]∥Transportation Research Board 94th Annual Meeting. Washington D C: Transportation Research Board, 2015.
[18] Amer A, Rakha H, El-Shawarby I. Agent-based behavioral modeling framework of driver behavior at the onset of yellow indication at signalized intersections[C]∥International IEEE Conference on Intelligent Transportation Systems (ITSC). Washington D C: ITSC, 2011: 1809-1814.
[19] Papaioannou P. Driver behaviour, dilemma zone and safety effects at urban signalised intersections in Greece[J]. Accident Analysis & Prevention, 2007, 39(1): 147.
[20] Gates T, Savolainen P, Maria H U. Prediction of driver action at signalized intersections using a nested logit model[J]. Transportation Research Record: Journal of the Transportation Research Board, 2014, 2463(2):10.
[21] Wilde G J S. The theory of risk homeostasis: implications for safety and health[J]. Risk Analysis, 1982, 2(4):209.
Modeling of Drivers’ Stop/Go Decision Behavior Based on Tradeoff of Risk and Benefit
TANG Keshuang1, ZHOU Nan1, DI Deshi2, LI Keping1
(1. Key Laboratory of Road and Traffic Engineering of the Ministry of Education, Tongji University, Shanghai 201804, China; 2. Guangzhou Urban Planning and Design Survey Research Institute, Guangzhou 510060, China)
Based on the empirical data collected at six signalized intersections in Shanghai, a drivers’ stop/go decision behavior model was developed by using the risk homeostasis theory (RHT) and the utility theory (UT). The study shows that the drivers’ stop/go decision behavior is significantly affected by the time of the red light and is tradeoff between traffic conflict risk and time saving benefit. The ratio of time-to-intersection (TTI) and waiting time of red light (R) of passenger car drivers is approximately 180∶1. Truck drivers are more aggressive on stop/go behavior than passenger car drivers, while drivers in urban district are more aggressive than drivers in suburban district. Moreover, the probability of severe traffic conflict is significantly increased by aggressive driving behavior.
signalized intersections; stop/go behavior; phase transition; risk homeostasis theory; utility theory
2015-12-02
“十二五”国家科技支撑计划(2014BAG03B02)
唐克双(1980—),男,副教授,博士生导师,工学博士,主要研究方向为交通控制和智能交通系统.E-mail:tang@tongji.edu.cn
U491.1
A
