远程红外热成像检测技术在变电站巡检机器人中的设计与应用研究
2016-12-08刚陈耀高袁
洪 刚陈耀高袁 愿
(1.广西电网有限责任公司北海供电局,广西 北海 536000;2.厦门红相电力设备股份有限公司,福建 厦门 361001)
远程红外热成像检测技术在变电站巡检机器人中的设计与应用研究
洪 刚1陈耀高2袁愿2
(1.广西电网有限责任公司北海供电局,广西 北海 536000;2.厦门红相电力设备股份有限公司,福建 厦门 361001)
本文基于远红外热成像技术原理及远红外热成像在应用领域中的优势,提出变电站远红外热成像巡检机器人的设计思路,借助电力设备检测集控中心数据平台,可快速发现并诊断电力设备故障所在,也可应用于故障隐患预测,从而保障电力设备安全运行。
红外热成像;检测;机器人;电力设备
变电站的安全巡检是电力工业系统的一项重大课题。推广使用变电站巡检机器人不仅可以解放劳动力,节约人力资源,更重要的是提高了安全保障。根据电力设备运行过程发热的特点,将红外热成像技术应用于变电站巡检机器人,可预测并检测变电站运行状况,从而保障电网安全稳定,提高供电质量。
1.红外热成像技术
红外热成像是借助光电设备,通过非接触形式,将人类视觉不可分辨的辐射能量信号转换成人类视觉可以分辨的图像信号的一门技术。红外热成像常用于检测系统中,这项技术突破了人类感官触觉和视觉的局限,促进了多个领域检测水平的提升。
1.1红外热成像原理
人类的感官视觉可分辨光波波长范围为0.38μm~0.78μm,人类感官视觉不可分辨的波长范围为0.78μm~1000μm,这一波长范围称之为电磁波,又称为红外线、红外辐射。自然界中任何温度高于绝对零度(-273.15℃)的物体,在其构成自身分子和原子的运动下,均不停地向外辐射出一定波长的红外线,并产生辐射能量(红外热能),物体辐射出的红外线以及产生的红外热能未能为人类视觉和触觉感知,但可以借助一定光电探测设备可以探测出,并将检测到的信号转换成图像视频信号形成图像,测出该物体温度与温度场分布,从而判断该物的运行状态。即根据物体温度发生的微小变化,诊断其存在故障或缺陷的情况,或预测其可能性。
根据红外热成像这一原理,借助智能机器人这一载体,将二者有机结合,定制红外热成像巡检智能机器人,则可实现变电站等电力设备的安全巡检,实现电网故障隐患早发现早处理,为电力设备运行状态检测提供了科学和安全保障。
1.2红外热成像检测技术优势
1.2.1应用广泛
红外热成像检测设备在各大领域广泛应用,其原因在于:红外热成像检测设备采用光电信号转换技术,将不可见的红外辐射转换为可见图像信号,故而,其不因周围光照等条件的变化而受影响,可以对目标物体实行昼夜检测,甚至在雾霾、暴雨、大风等恶劣环境下仍然提供准确地检测。目前在森林防火、安全防范监控、电力系统检测、医学诊断和军事领域均得到广泛应用。
1.2.2灵敏精准
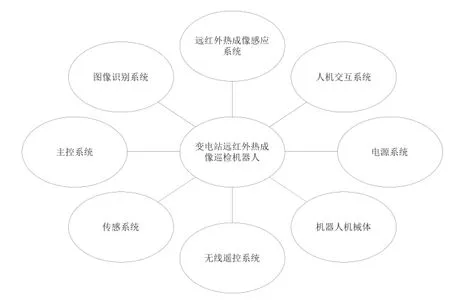
图1 系统模块结构设计图
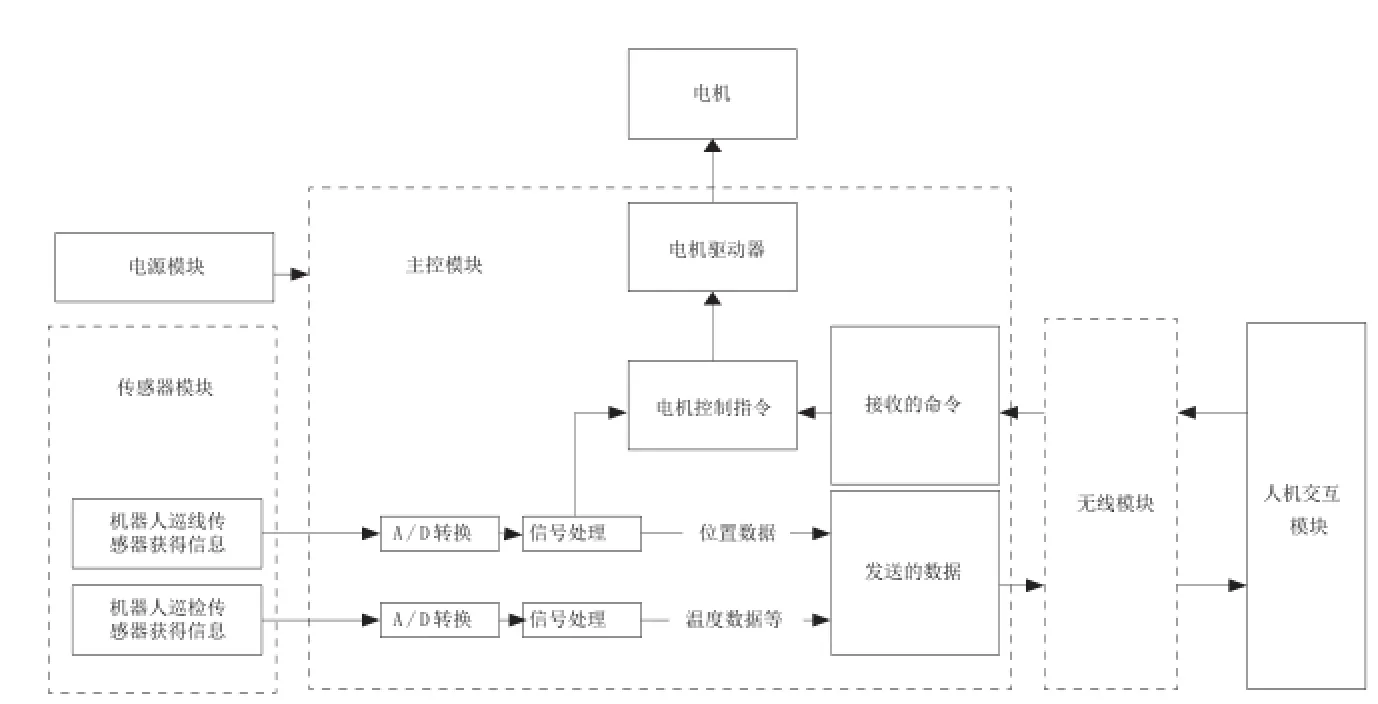
图2 系统模块功能设计图

图3 传感设备检测系统设计图

图4 人机交互系统设计图
采用红外热成像检测技术对电力设备进行检测,其灵敏度很高,在基础室温在30℃温度时,用一台普通的红外热成像检测仪进行检测电力设备系统,其灵敏精确度可达0.12℃~0.02℃。即普通红外热成像检测仪即可分辨出被检测的电力设备零点几度的温差,根据检测到的温差,通过数据推演,则可诊断出被检测的电力设备温度场的微小变化,为精准诊断电力设备故障点和预测电力设备故障隐患提供有力的技术支撑。
1.2.3高效可靠
由于红外热成像检测设备捕捉的是红外辐射信号,即红外热成像检测设备捕捉光波信号,因而不受电磁干扰,即使是在强电磁场的环境下(如输变电站、高压线网)工作,红外热成像仪检测设备并未受到任何影响,性能仍然很优越且稳定可靠。目前应用于电力设备上的红外热成像检测技术均采用先进的红外搜索与跟踪系统,具有很强的抗干扰性能,且能同时跟踪多个检测目标,能实现远距离精确检测目标和跟踪目标,大大提高了工作效率。
1.2.4安全直观
红外热成像检测借助光电探测设备,通过获取被检测物表面热辐射的红外能信号实现检测,因此,可以通过远程监控平台操控设备即可实现检测,实现非接触式即时检测,负电状态下的电力设备均可用红外热成像仪检测。红外热成像检测技术彻底颠覆了传统人工检测巡检方法,检测人员只需进行计算机及相关设备操作或遥控,根据热成像视频信号,判断检测结果,具有安全、直观的优势。
2.远红外热成像检测技术在电力工业中的应用
2.1应用范围
电力工业是一个庞杂的系统,电网纵横交错,变电站星罗棋布,电力设备及其组成元件多,分布地域广,功能特性杂,其故障发生和故障隐患情况与缘由差异大,但统计结果显示,电力设备内外接触不良、绝缘体受潮劣化等是其电力系统故障产生的最主要因素。电力设备故障则可产生温度变化,而温度变化则可通过红外热成像检测设备得知。目前,红外热成像检测在电力工业领域的应用较为普遍,范围也较为广泛,通常包括:变压器、避雷器、电容器、高压线路等。
2.2应用效果
由于红外热成像检测克服了光源要求和电磁干扰,可以在黑夜甚至完全黑暗无光的环境下进行,且检测的范围大、距离远。因此,远红外热成像检测设备可以为所有电气设备、配电系统,包括高压接触器、熔断器盘、主电源断路器盘、接触器、以及所有的配电线、电动机、变压器等。利用红外热成像检测,可以发现潜在故障和隐患,不仅提高了检测效果,有效防止故障隐患发生,也大大降低了人工检测的不安全因素。此外,用红外热成像检测设备代替传统维修中的定期清扫和紧固工作,可以节约费用50%~90%,大大节省了检测成本,提高了检测效率。
3.变电站远红外热成像巡检机器人设计
变电站巡检机器人集机电一体化技术、多传感器融合技术、电磁兼容技术、导航及行为规划技术、机器人视觉技术、无线传输技术于一体,是多项技术的综合应用。
变电站远红外热成像巡检机器人基于其工作性能的定位,在设计上遵循“无人值守、无线遥控、多重感应、红外检测、数据分析”理念,定制“可替代运行维护人员巡检”效果的智能机器人。
3.1功能设计
根据变电站远红外热成像巡检机器人的设计理念和定制要求,结合变电站巡检机器人工作环境,可知变电站巡检机器人必须具备以下基础功能:
(1)移动。变电站远红外热成像巡检机器人可以通过感应系统按照导航指令移动,能按照指令完成前进、后退、向左、向右、暂停等动作,能越过或避让一定的障碍物,并能实现移动速度可控。
(2)无线控制。变电站远红外热成像巡检机器人能解码各式方程指令,通过感应系统实现无线操控,即通过磁感应、红外感应等系统对机器人输入指令操控该机器人。
(3)精准定位。变电站远红外热成像巡检机器人具备自我发射定位信号和呼应基站信号的能力,通过信号呼应完成自我精准定位,且达到正负2cm定位精度。
(4)图像识别。变电站远红外热成像巡检机器人借助无线遥控与主控系统,将收集的辐射信号信息传输到后台计算机系统,再通过计算机系统对接受的数字信号进行处理,转为图像信号,并对图像信号进行处理和分析,从而诊断巡检对象是否存在故障或故障隐患。
3.2系统模块设计
根据变电站热成像巡检机器人的设计理念、功能要求以及工作指标,此机器人应包括如下几个子系统。如图1所示。
人机交互系统关联机器人与操作者,从工作流程上是:操作者输入指令,机器人获取指令后控制其运动,同时将传感数据反馈主控系统的数据中心。
无线遥控系统集合了多重感应,其主要功能是将指令和数据通过磁感应或红外感应的方式进行发送,使机器人由操作者掌控。
主控系统连接计算机数据中心,其主要功能是搜集传感器的数据,对搜集的数据进行比对和处理,按照操作者的指令,实现对机器人与其他功能系统相应关联与控制。
电源系统的功能是为机器人提供动力源,保障机器人移动、指令信号接收与处理,完成指令动作所必须的能源。
传感系统主要作用是接收与发送信号和数据,机器人通过信号与数据接收与发送,完成自身精准定位和数据分析处理,并通过无线遥控或感应系统发送给控制基站。
图像识别主要借助无线遥控系统与传感系统将接收到的数字信号传输至后台计算机系统,由后台计算机对接收的数字信号进行分析、处理与诊断。以上各系统的功能如图2所示。
3.3传感器系统设计
变电站远红外热成像巡检机器人传感系统可融合磁导航和红外传感系统,避免对光源的要求其他条件的干扰。利用电站远红外热成像巡检机器人这一移动载体平台,搭载各种检测系统或装置。如:存储数据库(存储媒介)、智能定位系统、远红外热成像仪系统、图像采集处理系统、声音采集处理系统等。如图3所示。
3.4人机交互系统设计
变电站热成像巡检机器人的导航与监控管理最终依赖人的操控,因此,须建立一个机器人监控中心(基站),对机器人进行有效地导航与监控管理。一般而言,机器人监控基站与机器人之间通过无线网桥组成无线局域网,操作人员基于网络实现对机器人的全面监控与管理。如图4所示。
在人机交互系统中,可见光图像、红外图像等数据汇集到网络集线器后,经无线网桥、网络集线器传到基站计算机中心,连接到局域网上的计算机可实时浏览变电站机器人反馈的各项数据,从而分析判断电力设备故障情况和机器人自身运行情况。
4.远红外热成像巡检机器人应用
4.1远红外热成像巡检机器人在故障诊断中的应用
如上所述,远红外热成像巡检机器人是一个移动集控平台,基于这一平台,通过人机交互系统,实现与计算机云平台系统关联,从而完成视频监控、远红外云台测温、变压器油色谱监测、高压室环境监测、避雷器监测等监测监控,建立变电站智能巡检管理平台,实时采集设备的温度、油色谱、气体密度、高压室环境等信息。在此基础上,机器人将检测到的设备运行的状态信息、视频图像信息通过无线遥控与传感系统,传输到后台计算机系统进行必要地分析判断、整合和集成,通过数字信号与图像信号的相互转换和处理,反馈至基站或监控中心,通过数据与图像的分析比对,得出巡检对象运行状况,并以直观的图像形式展示,从而为快速诊断电力设备故障提供技术支撑,为及时抢修电力设备做好前期准备和基础。
4.2远红外热成像巡检机器人在预测维护中的应用
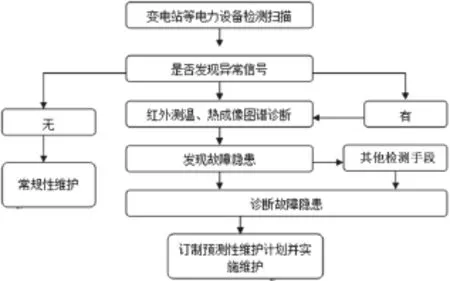
图5 预测维护过程示意图
变电站等电力系统设备鲜有突然出现故障,故障原因分析统计显示:绝大部分电力故障是电路逐步受损产生的结果。温度产生变化常常是设备损坏或功能故障的起初征兆,这一征兆只有通过红外温测方可得知,即电路早期发生的故障性温度变化信号只有通过红外热成像检测仪才能获取。远红热成像巡检机器人是非接触红外温度测量,可以二维图像的形式来记录温度状况。同时,与只能在单个点处获取温度数据的红外摄像仪不同,远红外热成像机器人可以捕获关键部位以及设备系统整体的温度,通过无线遥控与传感系统将图像传输至后台计算机系统,并通过计算机系统对数据信息与图像信息进行分析处理、甄别与判断,对照计算机系统中心数据库信息,将红外数据与来自其他技术的数据进行关联,得出关键性数据,从而综合评估出设备的实际运行状况,为预测性维护提供技术支撑。远红外热成像巡检机器人在预测性维护的应用过程如图5所示。
[1]白廷柱,金伟其.光电成像原理与技术[M].北京:北京理工大学出版社,2006.
[2]宋玉伟,宋纯鹏.红外成像技术在生命科学中的应用[J].生命科学研究,2004(5):121-125.
[3]戴景民,汪子君.红外热成像无损检测技术及其应用现状[J].自动化技术与应用,2007(1):1-3.
TM63
A