基于PLC溶液混合控制系统的设计
2016-12-07游珍珍
游珍珍
基于PLC溶液混合控制系统的设计
游珍珍
(湖南科技学院 电子与信息工程学院,湖南 永州 425199)
文章以西门子S7-200系列PLC为主要器件设计溶液混合控制系统,用PLC来控制电磁阀和搅拌机的通断,从而控制混合液体的量以及搅拌机搅拌的时间,以达到所要求的混合液体的特性,并形成循环状态。本文所设计的溶液混合控制系统无需人工在恶劣的环境中进行操作,大大提高了工作环境的安全性,同时也提高了工作的效率以及混合液体比例的准确性。
PLC;溶液混合;搅拌
1 引 言
多种溶液混合是将多种溶液按照先后顺序,按照一定比例,达到一定的量,然后利用搅拌机进行搅拌均匀混合。在化工、制药等行业中,多种溶液混合工序必不可少,而需要混合的溶液如为易燃易爆、有毒有腐蚀性的物体时,就不适合人工直接进行操作,因此,其生产采用自动化操作以确保整个混合溶液过程的混合精确、控制可靠。
随着PLC技术的快速发展,PLC将计算机技术、自动控制技术和通讯技术融为一体,成为实现工厂自动化的核心设备,其具有可靠性高、抗干扰能力强、组合灵活、编程简单、维修方便等诸多优点[1]。随着技术的进步,其控制功能由简单的逻辑控制、顺序控制发展为复杂的连续控制和过程控制,成为自动化领域的三大技术支柱[2]。采用PLC控制溶液混合的装置也取得了不断的发展和完善,基本实现了自动化和智能化操作。这样不仅改善了操作环境,减小了对人身体的伤害,增加了器件的使用寿命,同时也提高了工作的效率以及混合液体的精度。因此,使得基于PLC的溶液混合控制系统在炼油、化工、制药等方面得到了广泛的应用。从而,也促进了这些行业的快速发展。
2 溶液混合控制系统的结构框图
基于PLC溶液混合控制系统的结构框图以PLC为控制中心,通过液位传感器感知容器中液体的量,然后将采样信号传给PLC,由PLC控制相应的开关进行动作,从而达到溶液混合所需要的要求。如图1所示是基于PLC溶液混合控制系统的结构框图。
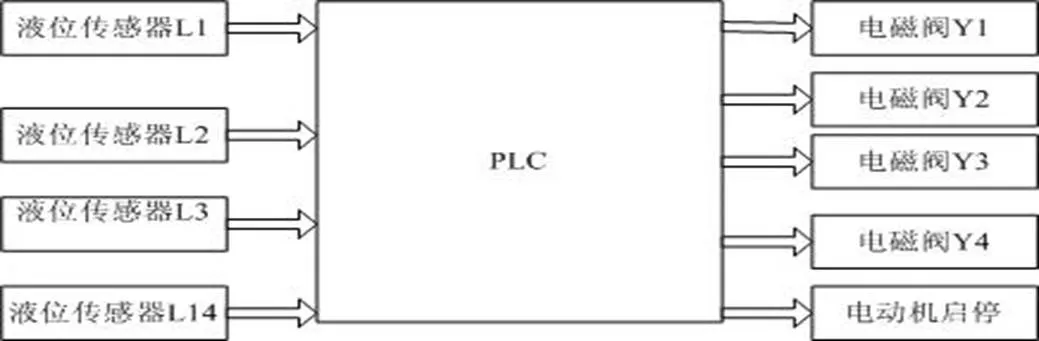
图1.基于PLC溶液混合控制系统框图
3 硬件设计
3.1主体硬件结构图
主体硬件结构图包括液位传感器L1、L2、L3;电磁阀Y1、Y2、Y3、Y4;液体搅拌机M。通过主体硬件结构图可以清楚的看出硬件的结构,如图2所示。
为了更好的控制混合液体的比例,首先对液体灌进行刻度。在相应的位置标示出其容积刻度。三个液体传感器是可以移动的,不同比例的混合可以通过调节液位传感器的位置来实现。
控制要求:(1)初始状态溶液混合装置是空的,各个电磁阀门Y1、Y2、Y3、Y4均为关闭状态,液位传感器L1、L2、L3均为关闭状态,液体搅拌机M为关闭状态。(2)按下启动按钮SB1后Y1=ON;液体A开始注入容器。当液体到达L1时L1=ON;使Y1=OFF,Y2=ON。此时,液体B开始注入容器。当液体到达L2时,L2=ON;使Y2=OFF,Y3=ON;此时,液体C开始注入容器。当液体到达L3时,Y3=OFF,M=ON;此时,搅拌机开始工作。定时一分钟以后,Y4打开,此时液体流出,一分钟以后,Y4关闭,完成整个过程。(3)按下停止按钮SB2,完成整个过程后再停止。
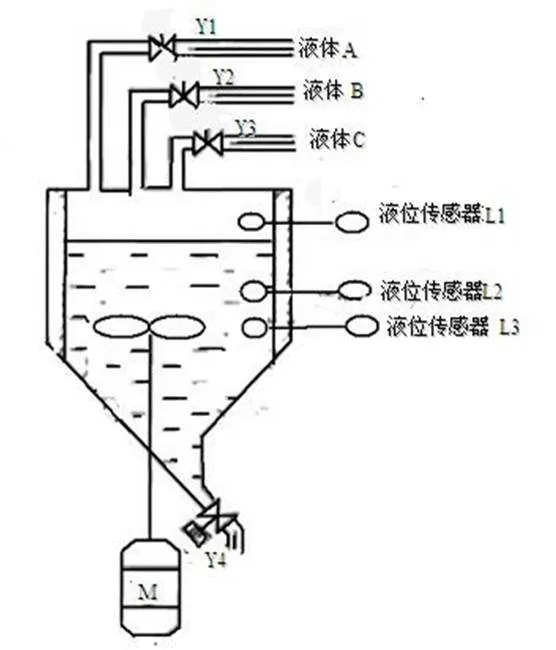
图2.主体硬件结构图
从图2中可以看到,该装置可以实现液体A、液体B和液体C的混合搅拌。三个液位传感器L1、L2、L3当液面淹没时为ON状态,电磁阀和搅拌机启动,通过PLC控制整个液体混合过程从而达到预期的控制效果。
3.2器件选择
3.2.1液位传感器的选择。LSF系列液位开关可提供非常精确的液位检测,其原理是依据光的反射折射原理,当没有液面时,光被前端的棱镜面或球面反射回来;有液体覆盖光电探头球面时,光被反射出去,这时的输出发生变化,相应的晶体管或继电器动作并输出一个开关量[3]。LSF光电液位开关能够耐腐蚀,适合在各种溶液混合环境中使用。
基于PLC的溶液混合控制系统的设计需要非常精确的控制不同液体之间量的比例关系,由于LSF-2.5型液位传感器是利用光的反射原理来检测液面,具有很高的精确度。所以本设计采用LSF-2.5型液位传感器。
3.2.2搅拌电机的选择。EJ15系列电动机是全封闭自扇冷式鼠笼型三相异步电动机,其额定电压为220V,额定频率为50Hz,功率为2.5kW,采用三角形接法[4];EJ15系列电动机效率高、节能、转矩高、噪音低、振动小,运行安全可靠[5]。因此本设计采用EJ15-3型电动机。
3.2.3电磁阀的选择。VF4-25型电磁阀采用聚四氟乙烯制作,使用硫酸、盐酸、有机溶剂、化学试剂等酸碱性的液体作为介质,其功率为2.5kW,动作迅速、频率高。由于液体搅拌机的工作环境比较恶劣,涉及许多化学药品及腐蚀性的液体,为了考虑电磁阀的使用寿命等问题,选择一种材质好,能用于比较恶劣环境的电磁阀,因此选用VF4-25型电磁阀。
3.2.4接触器的选择。CJ20-10/CJ-16型接触器操作频率为1200次/h,机电寿命为1000万次,功率为2.5kW。本设计所要求的接触器要有足够快的频率变换,从而使控制更加的准确,从该角度出发选择CJ20-10/CJ-16型接触器更加合适。
4 软件设计
4.1 PLC输入输出点分配
本设计采用西门子公司的S7-200系列PLC实现溶液混合控制系统,CPU模块采用CPU224模块,该模块采用交流220V供电。这个控制系统的输入有启动按钮、停止按钮和液位开关(共3个)共5个输入点;输出有3个进水电磁阀,1个排水电磁阀,搅拌电机共5个输出点。因此CPU224自带的14个输入点和10个输出点完全满足本文所设计的PLC控制系统的设计要求[6],所以不需要另外的电源模块以及数字量输入和输出模块。
表1.I/O分配
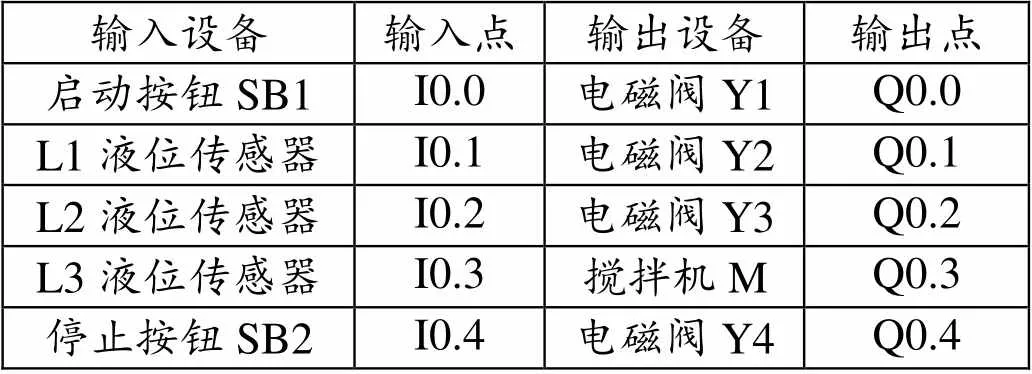
输入设备输入点输出设备输出点 启动按钮SB1I0.0电磁阀Y1Q0.0 L1液位传感器I0.1电磁阀Y2Q0.1 L2液位传感器I0.2电磁阀Y3Q0.2 L3液位传感器I0.3搅拌机MQ0.3 停止按钮SB2I0.4电磁阀Y4Q0.4
4.2梯形图程序设计
根据本设计的要求,按启动按钮后,执行第一步即电磁阀Y1打开,液体A流进液体灌;当液体A的高度超过液位传感器L1时,将电磁阀Y1关闭,电磁阀Y2打开,液体B流进液体灌;当液体B的高度超过液位传感器L2时,将电磁阀Y2关闭,电磁阀Y3打开,液体C流入液体罐;当液体C的高度超过液位传感器L3时,将电磁阀Y3关闭,搅拌机搅拌一分钟;搅拌一分钟后,电磁阀Y4打开释放罐中液体,定时一分钟后关闭Y4,然后进入下一循环。程序流程图如图3所示。

图3.程序流程图
按照上述过程以及I/O分配设计梯形图程序,初始状态容器时,各个阀门的输出Q0.0、Q0.1、Q0.2、Q0.3和Q0.4均为OFF,液位传感器的输出也均为OFF,电动机FM的输出为OFF。按下启动按钮SB1后Y1闭合,此时,I0.0=ON,Q0.0=ON;液体A开始注入容器。当液体到达L1后Y1断开,Y2闭合;此时I0.1=ON,Q0.1=ON,液体A断流,液体B开始注入容器。当液体到达L2后,Y2断开,Y3闭合;此时,I0.2=ON,Q0.2=ON,液体B断流,液体C开始注入容器。当液体到达L3时,Y3断开,FM闭合;此时,搅拌机开始工作。定时一分钟以后,Y4打开,此时液体流出,一分钟以后,Y4关闭,完成整个过程。当按下停止按钮SB2,完成整个过程再停止。具体梯形图如图4所示。

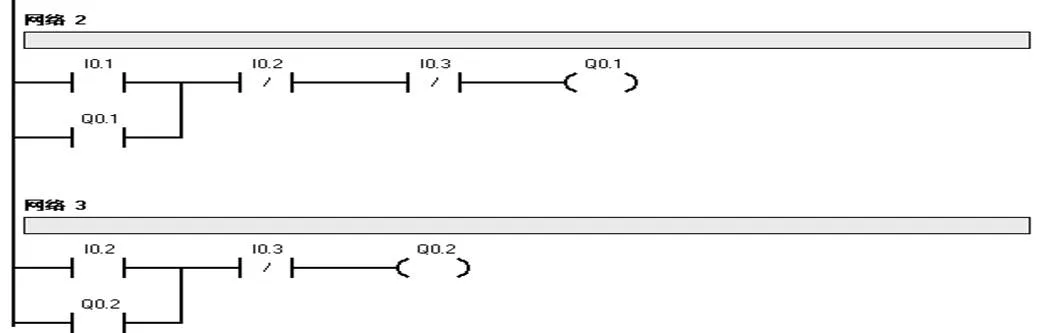

图4.梯形图
5 仿 真
本设计通过西门子S7-200系列PLC仿真软件对所设计的程序进行了仿真。
注入液体A的仿真结果如图5所示。I0.1代表液位传感器L1,Q0.1代表电磁阀Y2。此图显示当I0.1=ON时,即液体A已经到达液位传感器L1的位置,此时Q0.1=ON,说明液体A断流,液体B开始注入液体灌内。

图5.仿真结果图一
注入液体B的仿真结果图如图6所示,I0.2代表液位传感器L2,Q0.2代表电磁阀Y3,此图显示当I0.2=ON时,Q0.2=ON,说明液体B已经到达液位传感器L2的位置。此时液体B断流,液体C开始注入液体灌。
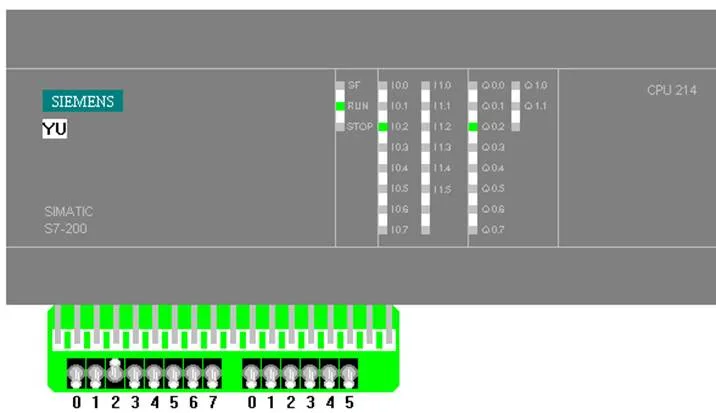
图6.仿真结果图二
注入液体C的仿真图如图7所示,I0.3代表液位传感器L3,Q3代表搅拌机,如图所示当I0.3=ON时,Q0.3=ON,说明液体已经到达液位传感器L3的位置。液体C断流,搅拌机开始搅拌。

图7.仿真结果图三
通过仿真结果图可以看出,注入三种不同液体时其仿真结果验证了设计的正确性,满足了设计要求。
6 结束语
本设计实现了由PLC控制溶液任意比例的混合装置,由于PLC本身具有可靠性高、灵活性强、对工作环境无要求和抗干扰性能好等诸多优点[7],从而使得不需要操作人员在恶劣现场环境中进行操作。采用PLC控制溶液的混合,随时可以修改溶液混合比例,满足不同溶液混合的需求[8]。另外,本设计采用了定时器对搅拌时间进行控制,准确的控制了溶液混合程度及输出时间。本设计可以广泛应用于农业和制药领域。
[1]操火森,王高潮,李娟.PLC在环卫压缩站液压系统中的应用[J].机械工程与自动化, 2010,(3):139-141 .
[2]朱江丽.可编程逻辑控制器在工业控制中的应用[J].能源与节能,2015,(3):84-86.
[3]郑新.智能电网与传感器[J].电器工业,2015,(10):37-43.
[4]李卓.多种液体混合灌装机控制系统的硬件电路设计[J].科技创业家,2012,(11):48-49.
[5]黄建龙.高效电动机发展及推广应用研究[J].科技广场, 2015,(8):83-86.
[6]徐敏.DZ型电子液位器在工业液体混合控制系统中的应用[J].自动化应用,2015,(4):82-83.
[7]刘玉梅.多种液体混合自动控制系统设计[J].辽宁工学院学报,2000,(6):14-15.
[8]殷兴光,孙瑜. PLC在液体混合装置中的应用[J].机电一体化,200,(5):63-65.
(责任编校:宫彦军)
2016-03-26
永州市科技计划项目(永科发[2015]9号No.2);湖南科学技术厅科技计划项目(项目编号2014FJ3143)。
游珍珍(1983-),女,湖南省永州人,讲师,硕士,研究方向为PLC在工业与农业控制中的应用。
TP273
A
1673-2219(2016)10-0036-03
