基于物联网的家居无人车安防系统
2016-12-06王佳斌
马 静 张 雪 王佳斌
(西安工业大学计算机科学与工程学院,陕西 西安 710021)
基于物联网的家居无人车安防系统
马 静 张 雪 王佳斌
(西安工业大学计算机科学与工程学院,陕西 西安 710021)
随着人们生活质量的提高,家居安全已经成为人们普遍关注的问题。文章通过以ARM Cotex-M3系列处理器为核心,利用物联网、远程控制以及红外发射与接收等技术,结合摄像头、WIFI、温湿度等相关环境感知模块,实现以无人车为载体的家居安防系统。系统通过无人车对环境的实时监察,从而完成APP与系统的远程交互。
智能家居;物联网;无人车;嵌入式系统;WIFI;手机APP
智能家居[1]作为智能生活重要的标识,其中人们最为关注的是智能安防系统部分。美国于1984年建造的第一个智能建筑,其将智能化融入建筑物之中,至此,世界智能家居的帷幕正式揭开。继美国之后,欧洲、韩国、新加坡、日本等国家的住宅智能化也得到了飞速的发展。而在我国,智能住宅的概念推广相对较晚,国内第一家智能家居企业出现于90年代末21世纪初。直到目前,已经将智能化小康示范区的建设列入国家重点发展方向。
智能安防系统以物联网[2]为基础,实现远程通信,实时获取家居信息,能够对环境状况进行反馈、警报,并能保存相关视频信息,能够有效地完成家居安防任务。系统采用无人车作为移动监测点,摆脱了安防系统的位置固定的缺点,实现了动态监察,灵活调动的作用,同时也方便了后续的系统更换与模块维修等。
本系统以自制的无人车“西工2号”作为研究平台,ARM Cotex-M3[3]系列处理器为无人车的处理核心,keil uvision4 和JDK为开发平台,外加摄像头、烟雾传感器、温湿度传感器和移动物体检测传感器作为环境感知模块,WIFI模块作为通信基础模块。利用WEB服务器[4]作为中间媒介实现手机和无人车的远程通信。
1 系统方案
本系统系统结构如下图 1所示,主要分为三个部分:无人车硬件部分、服务器处理部分以及手机客户端部分,通过这三个部分的信息实时交互,实现手机对家庭环境的实时监控,确切保障家居安全。
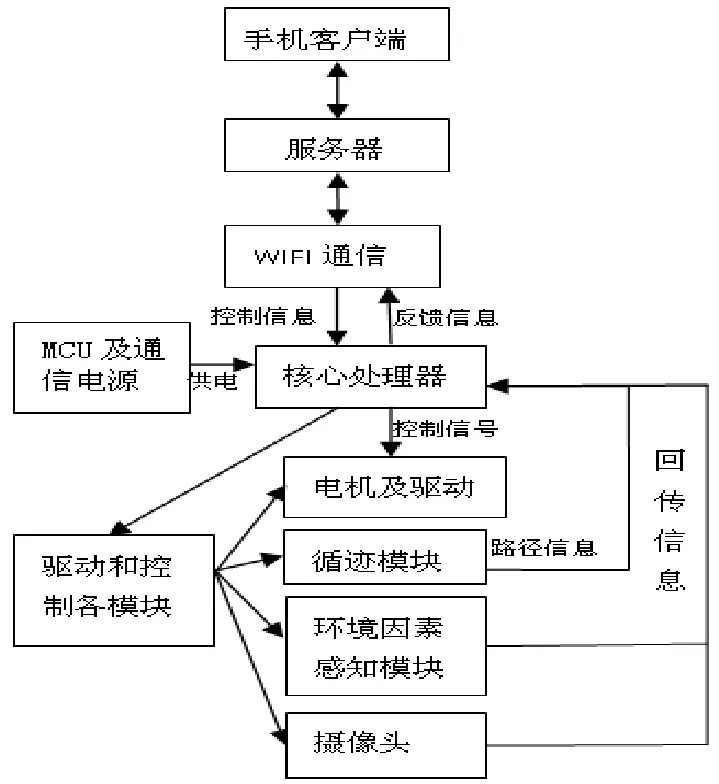
图1 系统结构图
1.1 无人车系统方案
无人车是整个系统的重要组成部分,它主要负责采集整个家庭环境中的各类环境信息并上传到服务器。无人车安装并使用多种模块,包括WIFI通信模块、摄像头模块、红外循迹模块以及相关其他环境检测模块,能够获得家庭空间中的多种环境信息。
1.1.1 WIFI通信模块[5]
WIFI通信采用 USI MR09WIFI模块,WiFi芯片支持802.11b/g无线网络模式,包含了WIFI协议栈、lwip协议栈、Uip协议栈和OSI七层协议栈,信号稳定,覆盖范围广。它有SDIO和SPI两种接口,本系统采用的是SDIO接口,可以提供比SPI更高的传输速率,能够实时进行各类信息的传输。
1.1.2 摄像头模块
摄像头采用的是鹰眼OV2640摄像头[6],120度视角、速度快、稳定性好和微光灵敏度高、是ov系列三十万像素当中成像质量最棒的摄像头。用它作为图像采集的工具,能够获得清晰的视频信息
1.1.3 环境因素检测模块
环境因素检测模块主要由 MQ-2烟雾传感器[7]、DHT11温湿度传感器[8]和移动物体检测传感器[9]组成,使得无人车能够在巡查过程中获得家庭环境的各项信息,如相关气体浓度、温湿度以及对移动物体的自主监察,通过无人车处理器处理并可以通过手机客户端进行信息查询,从而有效判断是否有意外突发情况。
1.2 寻径方案
无人小车在家庭空间进行安防工作时,需要一条固定并且能够全面检测家庭环境的行驶路径,如果采用路径规划[10]的方式,那样可能会导致覆盖点不全面,并且家庭空间中的家具变动也会带来一些问题。红外循迹模块[11]DOFLY LY-0040,用于小车走黑线、数字信号输出,感应范围为2mm——20mm。利用该模块,能够灵活地变动无人小车的行驶路径,自行根据物品摆放路循迹模块,用于小车走黑线,数字信号输出,电位器用于调节灵敏度,LED灯指示确定最佳行驶路径,并且设定起点和终点,到达终点后自动调头再回到起点,以最简单最全面的路径使无人车能获取到整个家庭空间的视频信息和其他环境因素信息。
无人车在家庭环境中的寻径路线如图2:
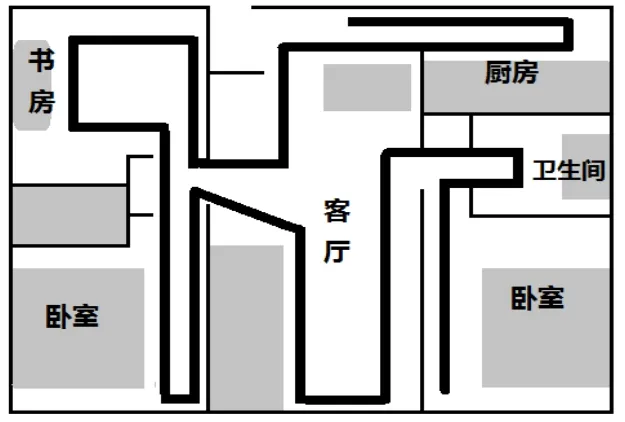
图2 寻径路线
1.3 无人车工作模式设置
无人车有三种工作模式,即休眠模式、安防模式和自动控制模式。
休眠模式:无人小车仅开启烟雾传感器、温湿度传感器、移动物体检测传感器,摄像头以及WIFI模块在该模式处于被动触发状态。即当这三类传感器任意一个反馈异常信息到处理器时,自动触发摄像头和WIFI模块进行响应,从而进入安防模式,并且向手机客户端发送警报。
安防模式:将沿着固定的巡查路径进行环境信息的采集,在行驶的过程中,无人小车会不停采集周围的环境信息,如果一切正常,那么就在一次巡查结束后向手机客户端反馈一切正常的信息,如果有异常情况,则在巡查过程中及时向手机客户端发出报警信息。一次巡查完成后,无人小车自动进入休眠模式。
自动控制模式:用户可利用手机控制无人车的行驶方式、行驶状态以及各模块的状态,实现自主控制。
1.4 远程通信的实现
1.4.1 远程信息交互
手机和无人车之间的通信,以服务器作为中间媒介,实现手机和无人车的远程信息交互[12]。实现过程如图3:

图3 实现过程
无人车上安装的 WIFI模块借助家庭内的路由器[13]访问外网连接服务器,将采集到的环境信息(如有毒气体浓度、移动物体信息和温度等)以及视频信息传到服务器。手机移动客户端连接互联网后,通过访问服务器与无人小车进行互联,获取相应的传感器信息,以及视频信息,并且能够对无人小车进行远程操控。
服务器后台对信息进行处理和存储,并且创建一个用于实时查看视频信息的接口,便于在手机移动端进行远程实时监控。利用数据库SQLITE[14],来实现数据的大规模存储,并运用 JAVA语言[15]对其进行操作做一些简单的分析为了实现更便捷的管理,添加一个可以生成时间列表的模块(即生成一个TIMEDATA.XLS文件),以时间间隔为参考,以每3小时的时间间隔来对视频数据进行分段处理。利用服务端的时间列表模块,在手机端可以很轻松的查看一天中任意时间段家庭内的情况。
1.4.2 报警系统的实现
无人小车的各个环境传感器模块均能够给小车的处理器反馈环境信息,利用软件设定环境因素异常的值,当环境因素返回处理器的值异常后,处理器生成报警信号,利用WIFI模块将异常值和报警信号发送给服务器,服务器及时发送给手机客户端,手机客户端接收到该报警信号后手机将会产生连续震动或响铃,以提醒异常情况的发生。此时,可以手机远程遥控无人小车,根据实时视频控制无人小车进行定点的环境查看。
2 手机客户端的设计
手机客户端利用JDK开发,分为五个功能模块,如图4所示,通过登录远程访问服务器,获取传感器信息、控制小车的状态。
用户登陆模块:限制权限,即设置账号、密码和验证码三个服务器访问机制,从而有效地保证软件使用时的安全性。
模式选择模块:利用手机可以任意切换无人车的休眠模式、安防模式和自动控制模式。
实时监控模块:可实时查看无人车的安防过程视频和当前家庭环境中各环境因素的状况。实时监控界面如图5所示:

图5 实时监控界面
视频回放模块:通过日期选择所需回放的安防视频。在点击选择想要查询的日期时,软件会到数据库中查询,并找到相应时间名称的表,再从表中选择中对应的时刻,实现手机观看安防视频的回放。
自主控制模块:当无人车的工作模式为自动控制模式时,手机客户端可以切换无人车的行驶方式是自主循迹还是人工控制,手机界面如图6,能够控制无人车的行驶状况,如前进、后退、左转、右转和停止,无人小车能实时做出调整,实现定点巡查。

图6 手机界面
3 安防系统实现过程
本系统的具体实现过程流程图,如图7所示:

图7 实现过程流程图
当用户手机连接互联网,然后打开客户端并登录,实现无人车与手机的远程连接,并且选择无人车的工作模式,确定无人车的运行状态。如果选择休眠模式,无人车将只开启烟雾传感器、温湿度传感器和移动物体检测传感器,摄像头和WIFI模块处于休眠状态,这样延长无人车待机时间;一旦所检测到的环境因素异常,无人车将启动摄像头和 WIFI模块,及时向手机报警。如果选择自动安防模式,无人车将沿行驶路径自主寻径进行安防巡查,巡查时若检测到异常信息,将立马发送到手机,并向手机报警,知道手机响应,然后继续安防巡查工作,到达终点后自动调头再回到起点,并自动置为休眠模式。如果选择自动控制模式,则无人车的所有模块均受到手机控制,可进行人为控制的安防巡查工作。
4 结束语
家居智能安防系统作为人工智能的重要开发方向,在未来有很广的拓展空间,提高了人们的生活质量。本系统以物联网为载体,采用ARM-Cortex-M3作为核心处理器,实现了远程人机交互,但是很多细节有待于后期提升和调整。作者设想主要从以下几个方面进行改进:第一,居室环境应该实现自主巡查和循迹巡查协同模式,避免单一循迹的局限性。第二,可以实现自主充电进而实现持久工作。第三,通过添加舵机,可以增大摄像头的视觉范围,并在其基础上通过与移动物体识别模块结合,来完成对移动物体的图像自主抓取功能。对于以上几点的可行分析性有待后期研究加以论证。
[1] 隋燕,程强.浅谈家居智能化[J].科技信息,2011(23):93.
[2] 赵富安,赵宇.物联网技术浅析[J].科技致富向导,2013(9): 371-372.
[3] 林恒杰.对基于 ARM Cortex-M3嵌入式系统的仿真[D].上海:上海交通大学,2008.
[4] 张海俊.嵌入式监控系统web服务器设计[D].杭州:浙江大学,2008.
[5] 朱阳,王伟成,王民彗.WiFi技术在智能车数据通信中的应用[J].传感器世界,2014,20(7):35-39.
[6] 龚长青,王清.智能车摄像头问题的研究[J].汽车实用技术,2011(3):13-16.
[7] 单春艳,章平,张同翰.基于STM32的学生宿舍烟雾检测器设计[J].工业控制计算机,2014,27(4):149-150.
[8] 王飞.低功耗温湿度无线传感器网络的设计与实现[D].沈阳:东北大学,2012.
[9] 唐徒文.基于智能无线传感器网络的移动物体检测[D].上海:上海交通大学,2007.
[10] 李江抒.多移动机器人路径规划算法与导航系统研究[D].长春:吉林大学,2004.
[11] 陈广祥,张治斌.基于红外反射式传感器的循迹车系统设计[J].单片机与嵌入式系统应用,2010(9):67-69.
[12] 章礼泽,赵卫军.单片机远程通信的电路设计[J].微计算机信息,2004,20(6):79-80.
[13] 孙璐.基于 TCP/IP的路由器远程实验系统[J].兵工自动化,2010,29(3):51-53.
[14] 韩善锋,曹凤海,易昌华.SQLite数据库在嵌入式程序开发中的应用[J].物探装备,2011,21(3):170-173.
[15] 陈林.基于 Java语言的手机软件开发技术分析[J].电子技术与软件工程,2015(6):53-54.
[16] 潘勇.无线远程控制管理系统:中国,CN203054564U[P]. 2013-07-10.
Home unmanned vehicle security system based on the internet of things
With the improvement of people's living quality, home security has become a widespread concern. This paper introduces home security system of ARM Cortex-M3-based unmanned vehicle, which uses internet of things, remote control technology and emission and receiving of infrared technology and combines some environmental perception modules like camera, WIFI, temperature and humidity sensor and so on. This system uses unmanned vehicle to monitor home environment real-timely and realize the long distance interaction between APP and the system itself.
Intelligent home; internet of things; unmanned vehicle; embedded system; WIFI; APP
TP242.6
A
1008-1151(2016)09-0006-04
2016-08-10
西安工业大学跨学科研究基金无人车自动避障与路径规划技术研究(CXY 1340-6);国家大学生创新创业项目(201410702037)。
马静(1980-),女,陕西西安人,西安工业大学计算机科学与工程学院讲师,硕士,研究方向为嵌入式系统;张雪(1995-),女,四川乐山人,西安工业大学计算机科学与工程学院在读学生,研究方向为嵌入式系统;王佳斌(1992-),男,陕西西安人,西安工业大学计算机科学与工程学院在读学生,研究方向为嵌入式系统。
