10 kW大功率磁控管控制系统的仿真
2016-12-06姜亮汪建华肖非然秦道东
姜亮,汪建华,肖非然,秦道东
等离子体化学与新材料湖北省重点实验室(武汉工程大学),湖北 武汉 430074
10 kW大功率磁控管控制系统的仿真
姜亮,汪建华*,肖非然,秦道东
等离子体化学与新材料湖北省重点实验室(武汉工程大学),湖北武汉430074
对大功率磁控管控制系统进行仿真是稳定磁控管微波功率输出和系统控制器设计的关键所在.首先,利用实验测量的数据和最小二乘法,在Simulink中建立10 kW磁控管的数学模型,然后进行PID控制器设计.在控制系统仿真过程中,控制输入量为设定功率所对应的期望输出电流值,反馈量为磁控管的阳极电流,利用Ziegler-Nichols方法对PID控制器参数进行整定.最终,仿真系统的功率输出达到期望的稳定值,将仿真所得与长时间实践所得进行比较,发现二者的差距甚小.由于仿真得到的控制器性能稳定且设计过程简便,故能够很好的应用于实际的微波输出控制系统中.
大功率磁控管;控制系统;Simulink;数学模型;仿真
1 引言
目前,在金刚石膜的生产工艺中,用微波放电产生等离子体方法增强化学气相沉积的手段得到了越来越广泛地应用.作为微波放电生产等离子体的装置中核心单元的磁控管,其输出功率直接决定了装置激发地等离子体的各种参数,而等离子体参数又直接影响到金刚石膜的工艺效果,所以说,磁控管的稳定功率输出控制具有重要意义[1].
在微波放电产生等离子体装置中,磁控管具有输出功率大、工作电压高、具有微波辐射和耗能大等特点,同时这也给搭建硬件调试的磁控管功率输出系统带来了极大的不便.本文利用Simulink强大的软件仿真的能力,建立磁控管数学模型并设计了控制器,实现了快速、节能和简便地磁控管稳定功率输出控制方式.
2 仿真模型
2.1磁控管特性分析
磁控管是获取大功率微波能的主要电力电子器件,其特性类似于处在正交电磁场空间下的高频二极管[2],由于磁控管工作在复杂的电磁环境中,存在较大的干扰,影响磁控管输出功率的主要因素有:
1)磁控管工作电场的负高压U;
2)磁控管灯丝电流;
3)磁控管工作磁通密度大小B.
其中,在电压和磁通密度相对稳定的情况下,磁控管灯丝电流变化较小,所以一般不考虑其对输出功率的影响[3].当磁控管处于稳定磁场中并正常工作时,输出的微波功率为

式(1)中,P为输出功率,α为磁控管的工作效率,U为磁控管的工作电场电压,I为磁控管的阳极电流[4].从式(1)可以知道,在工作效率的不变和磁场稳定的情况下,电场电压U和随之变化的阳极电流I决定了磁控管的功率输出大小.
以实验室中目前正在使用的10 kW大功率微波输出磁控管CK-619测量数据为蓝本建立磁控管仿真模型.将磁控管的电场电压保持在-10 kV不变,工作效率α为0.625的情况下,通过调节工作电磁铁的磁通密度B范围变化为1 440 Gs到1 590 Gs,功率输出P在1 kW~10 kW的实测数据经最小二乘法拟合后[5],得到如下图1所示的磁通密度B与阳极电流I输出特性曲线.

图1 B-I关系曲线Fig.1Relation curve of B and I
在电场电压为10 kV时,如图1左上侧的工作点Q1,其工作电磁场的磁通密度大小为1 450 Gs,阳极电流为1.6 A,磁控管的输出功率为10 kW;右下侧的工作点Q2,工作电磁场的磁通密度大小为1 584 Gs,阳极电流为0.16 A,磁控管处于断续工作状态,磁控管输出功率约为1 kW.
由此可以看出,在电场电压一定的情况下,随磁通密度B增加,磁控管的阳极电流I急剧下降,故可以将阳极电流信号的采样值与给定值相比较,当阳极电流I大于给定值时,反馈线路自动增大磁通密度B,从而使阳极电流I降低;反之,反馈线路则自动减小磁通密度B,以使阳极电流I上升;以此,通过改变磁通密度B大小的方法来稳定微波功率输出。
2.2建立仿真模型
根据欧姆定律可以知道,电流I的值与电压U的值成正比,与电阻R的值成反比[6].当磁控管的电场电压值不变时,由于阳极电流随磁通密度大小变化而改变,故可以看作磁控管内阻的大小会随着工作点的不同,其值也发生变化.在仿真的过程中,设定磁控管的电场电压值基本不变,采用受控电压源模拟电流随内阻值变化而改变的方式,使磁控管的阳极电流值随着工作点的不同而改变.由2.1节的最小二乘法拟合出的结果得到如下公式:

其中,I为磁控管阳极电流,U为工作电场负高压,Ut为门槛电压[7],Vm为电压当量[8],R0为内阻初值,B为磁通密度,β为比例系数,B0为特征磁通密度.从式(2)可以知道,阳极电流I的大小会随着电场电压和门槛电压的变化成指数关系变化;由式(3)可以知道,门槛电压的大小与特征磁通密度和比例系数β有关.结合式(2)和式(3)及图1得到:电压当量Vm为300,磁控管的内阻R0初值为3 000 Ω,β的值为-5.14,B0的值为1 625 Gs.由以上内容建立磁控管仿真模型如图2所示.
其中,管脚1为电场电压U的输入端口,管脚2为磁通密度B的输入端口,管脚3为阳极电流I的输出端口,管脚4为微波功率的输出端口.由于实际使用的过程中电磁线圈中存在金属护套和磁控管的阳极块,二者均为磁导体,当励磁电流发生变化时,导体中会出现感应电流阻碍其包围区域中磁场的变化,因此工作磁场的变化总是滞后于励磁电流的变化,所以在磁控管的仿真模型中,将惯性环节加在磁场控制输入端口后[9].

图2 磁控管数学模型Fig.2Mathematical model of magnetron
3 PID控制磁控管微波功率
3.1PID控制
比例积分微分(Proportion Integration Differen⁃tiation,PID)控制是控制器最常用的控制规律,在工业范围内获得了较为广泛的应用[10].由于磁控管工作的电磁环境比较复杂,存在的干扰量比较大,相对现阶段的其他控制策略来说,由于PID控制策略算法结构简单、适应性强和可靠性高,故仿真过程中使用的控制策略是PID控制[11].
PID控制器是一种线性控制器[12],它根据设定值R(t)与实际输出值Y(t)构成的控制偏差为

PID的控制规律为

式(5)中,Kp为比例系数;Ti为积分时间常数;Td为微分时间常数.
控制系统的控制策略如图3所示,将功率设定值换算为设定电流;通过阳极电流采样值与设定电流的偏差作为PID控制器的输入;由于反馈电流与磁通密度大小负相关,故将特征磁通密度B0作为磁场正向偏置,并将PID控制器的输出值进行幅值限制,其中限幅环节的上限值为1 650 Gs,下限值为1 420 Gs.
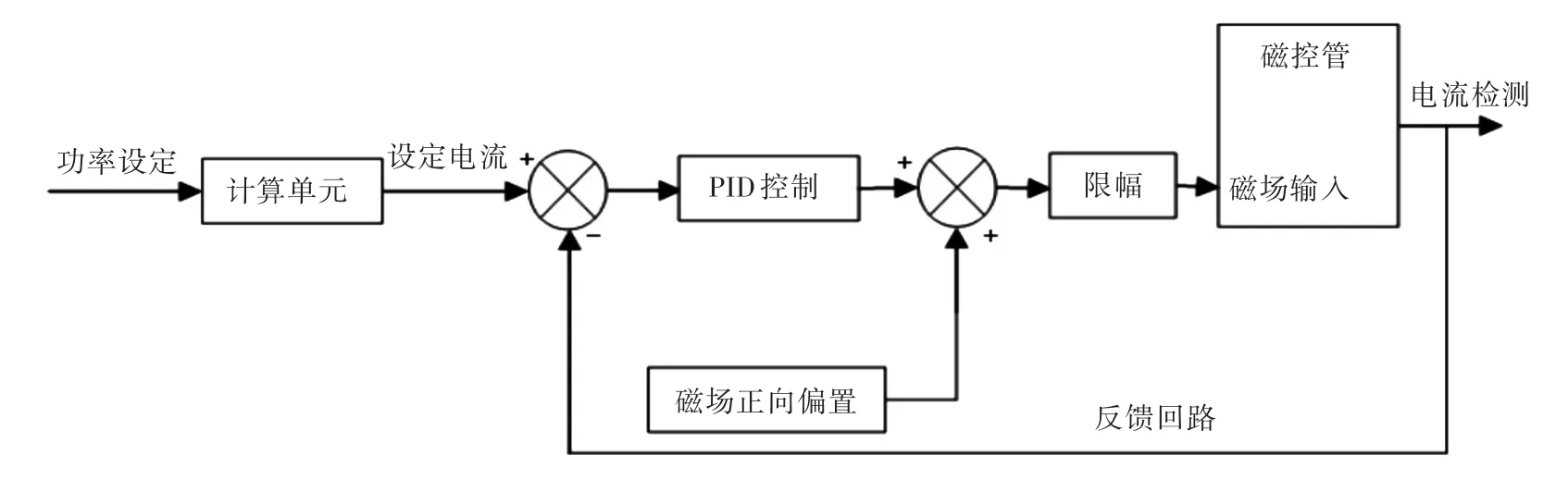
图3 微波功率输出系统的PID控制策略示意图Fig.3Schematic diagram of microwave power output system with PID controller
3.2功率控制仿真实例与分析
下面对磁控管功率输出实例仿真,设定输出功率为10 kW,电场电压U的值为-10 kV,电场电压干扰分别为幅值100 V的100 Hz工频干扰和幅值为300 V的低频电网波动干扰,磁通密度扰动的幅值为20 Gs的100 Hz外界干扰,要求磁控管的功率输出波动不大于1%.
在PID参数设定过程中使用了较为常规的Ziegler-Nichols方法对PID控制器进行初步整定[13],再经过仿真调试微调后,得到本仿真系统的PID控制器的Kp=2.64,Ti=1.53,Td=0.1,图4为在Simulink中的系统仿真图.
图5~图7为功率设定值为10 kW时,阶跃响应曲线、系统存在电场干扰时的输出曲线和存在磁场扰动时的输出曲线.

图4 系统仿真图Fig.4Diagram of system simulation

图5 系统阶跃响应曲线Fig.5Step response curve of system

图6 电场干扰时的功率输出曲线Fig.6Power output curve with electric field noise
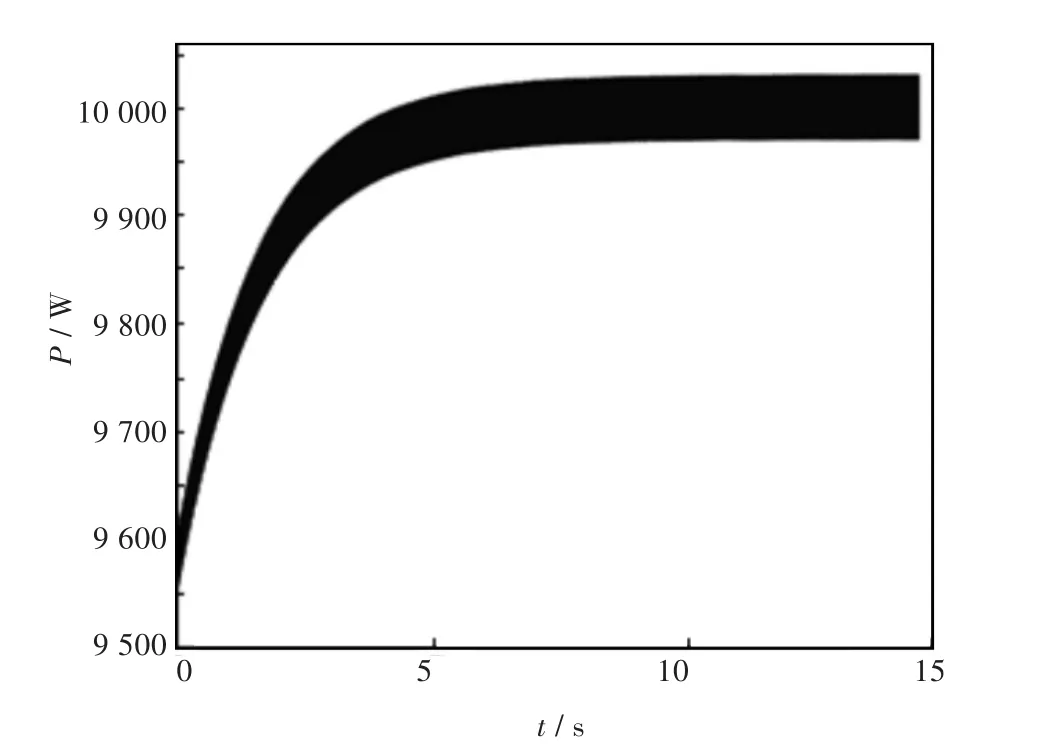
图7 磁场扰动时的功率输出曲线Fig.7Power output curve with magnetic field noise
由图5~图7可以看出,控制系统的动态响应为单调上升过程,且没有超调量出现,这是因为超调量有可能造成磁控管损坏,且在制造金刚石薄膜过程中,磁控管控制系统对动态性能的要求相对较低,而且较为缓慢的上升过程,可以给磁控管的其它部分有一个充足的预热过程[14].从加入干扰后的响应曲线来看,磁控管的功率输出没有大于1%的情况出现,说明控制系统的设计较为理想.
3.3结果
在控制系统仿真过程中,以磁控管的数学模型为基础设计了PID控制器.系统的阶跃响应曲线和系统在加入电场干扰时的功率输出曲线和磁场扰动时的功率输出曲线表明,系统整体为一个二阶欠阻尼系统,输出约在10 s时达到设定值,且具有较强的抗干扰能力.仿真所得到的PID控制器参数和存在干扰时系统输出情况与实验室经过长期实践摸索所得到的PID控制器参数和存在干扰时系统输出情况基本相似[15].如前所述,表明本文建立的磁控管仿真模型是正确而有效的,仿真所得的控制器参数能被用作实际控制系统的PID控制器设计的参考数据.
4 结语
由于磁控管实际的控制调试有着成本高、辐射大等各种困难.结合磁控管的理论特性和实践中实验数据建立了磁控管的数学模型;然后以PID控制器为核心建立了磁控管控制仿真系统,在与实践中的反复尝试所得到结果对比后,证实了本文建立的磁控管模型的正确性,设计控制器的合理性.结果表明磁控管控制系统仿真不仅可以提高微波功率输出的稳定性,还可以缩短系统控制器的设计周期.
[1]李峰,陈颀.工业微波加热器智能控制系统的设计[J].工业加热,2011(6):22-24. LI F,CHEN X.The system with intelligence control industrial device of microwave heating[J].Industrial heating,2011(6):22-24.
[2]王建,马永堂.微波大功率输出及其控制技术研究[J].西北工业大学学报,2012(5):379-383. WANGJ,MAYT.Technologyforhighpower microwave output and its control[J].Journal of Xi'an technological university,2012(5):379-383.
[3]崔士杰,汪建华,秦道东,等.大功率微波电源设计[J].机电工程技术,2008,37(10):62-64. CUI S J,WANG J H,QIN D D,et al.Design of high-power microwave electrical source[J].Mechanical and electrical engineering technology,2008,37(10):62-64.
[4]李宗朝,汪建华,秦道东.大功率微波电源的稳定设计[J].机电工程技术,2012,41(12):45-48. LI Z C,WANG J H,QIN D D.Design of high-power microwavesource[J].Mechanicalandelectricalengineering technology,2012,41(12):45-48.
[5]姚俊,冯海涛,于琦.最小二乘法在随机控制系统辨识中的应用[J].沈阳理工大学学报,2014(6):12-15. YAO J,FENG H T,YU Q.The application of least method in identification of stochastic control system[J]. Journal of Shenyang ligong university,2014(6):12-15.
[6]何立志.直流电路中欧姆定律与基尔霍夫电压定律的统一性探析[J].株洲工学院学报,2005(7):40-42. HE L Z.Compliance of Ohm's law and Kirchhoff voltage law in direct current[J].Journal of Zhuzhou institute of technology,2005(7):40-42.
[7]杨威.工业功率微波电源技术研究[D].衡阳:南华大学,2013.
[8]陈彦涛.光电二极管放大电路设计[D].西安:陕西师范大学,2014.
[9]裘家琪,陈怀璧,唐传祥,等.磁控管的电荷分布[J].强激光与粒子束,2013(2):477-480. QIU J Q,CHEN H B,TANG C X,et al.Space charge distribution in magnetrons[J].High power laser and particle beams,2013(2):477-480.
[10]李杰,齐晓慧,韩帅涛.四种先进PID控制方法及性能比较[J].计算技术与自动化,2012(3):19-24. LI J,QI X H,HAN S T.Four kinds of advanced PID control methods and comparison of their performance[J].Computing technology and automation,2012(3): 19-24.
[11]李平,王欣.改进型模糊自整定比例积分微分温度控制系统[J].武汉工程大学学报,2013,35(3):79-82. LI P,WANG X.System of temperature control based on fuzzy self-tuning proportional integral differential[J].Journal of Wuhan institute of technology,2013,35(3):79-82.
[12]王红.基于PID算法的旋转倒立摆系统设计[J].大众科技,2014(10):25-27. WANG H.Design of rotational inverted pendulum system based on PID algorithm[J].Popular science& technology,2014(10):25-27.
[13]李成响,李平,曹江涛.气分装置过程模型辨识及PID参数优化[J].自动化与仪表,2013(3):41-44. LI C X,LI P,CAO J T.Gas separation unit model identification and PID parameters optimization[J]. Automation and instrumentation,2013(3):41-44.
[14]向东,汪建华,秦道东,等.大功率微波电源设计[J].机电工程技术,2008,37(1):26-27. XIANG D,WANG J H,QIN D D,et al.Design of high-power microwave source[J].Mechanical and electrical engineering technology,2008,37(1):26-27.
[15]李宗朝.大功率微波电源控制方案的研究[D].武汉:武汉工程大学,2013.
本文编辑:陈小平
Simulation of Magnetron Control System of 10 kW High Power
JIANG Liang,WANG Jianhua*,XIAO Feiran,QIN Daodong
Hubei Key Laboratory of Plasma Chemical and Advanced Materials(Wuhan Institute of Technology),Wuhan 430074,China
Simulation is the key to stabilize the magnetron microwave power output and design system controller in the magnetron control system of high power.Firstly,the mathematical model of 10 kW magnetron was estab⁃lished by using Simulink/Matlab software based on the experimental data and least-squares method.Then,the proportion integration differentiation(PID)controller for magnetron control system of high power was designed. In the simulation process,we set the controller's input as the expected current value of the setting power and set the feedback signal as the anode current of magnetron,and adjusted the PID parameters by the Ziegler-Nichols method.Finally,the output power of simulation system reaches the expected value.There is little difference in results between the long-term practice and the simulation.The PID controller can be properly applied into actual microwave output control system with the steady performance and simple design process.
high power magnetron;control system;Simulink;mathematical model;simulation
O539
A
10.3969/j.issn.1674⁃2869.2016.05.016
1674-2869(2016)05-0495-06
2016-04-23
湖北省教育厅科学技术研究计划优秀中青年人才项目(Q20151517);武汉工程大学科学研究基金项目(K201506)
姜亮,硕士研究生.E-mail:1050673808@qq.com
汪建华,博士,教授.E-mail:wjhwz@126.com