基于确定学习理论的轴流压气机系统分岔预测
2016-12-06文彬鹤王聪易学飞闻伟朱爱峰
文彬鹤,王聪,易学飞,闻伟,朱爱峰
(1.中国航发控制系统研究所,江苏无锡214063;2.华南理工大学自动化科学与工程学院,广州510641)
基于确定学习理论的轴流压气机系统分岔预测
文彬鹤1,王聪2,易学飞1,闻伟1,朱爱峰1
(1.中国航发控制系统研究所,江苏无锡214063;2.华南理工大学自动化科学与工程学院,广州510641)
针对轴流压气机系统中的分岔预测问题,基于简化的M oore-G reitzer 3阶压气机模型,分析了该系统中存在的分岔现象;利用最新发展的确定学习理论,对压气机系统随着γ参数变化出现的几种典型模态的相关系统动态进行辨识,并将所学知识保存成常值RBF神经网络以构成模式库;利用该模式库构建1组嵌入了常值RBF神经网络的动态估计器;将测试模式与估计器相比,得到1组残差,并利用动态模式识别方法的残差最小原则实现了对Pitchfork分岔的预测。
pitchfork分岔;旋转失速;确定学习;系统辨识;动态模式识别;快速预测;轴流压气机
0 引言
长期以来,学术界对轴流压气机的喘振和旋转失速的研究广泛开展[1-3]。研究表明,在系统喘振的起始,总是伴有压气机的旋转失速[4],旋转失速被认为是喘振先兆,因此很多研究者将注意力集中在对旋转失速的研究上[5]。理论模型研究方面,Emmons[6]从失速初始扰动和压气机叶片通道流动的机理开始建立了旋转失速初始扰动模型。在Emmons理论的基础上,Moore和Greitzer等[7-8]进一步利用3次性的非线性压气机特性曲线和1阶Galerkin逼近方法,将压气机模型转化为3阶常微分方程模型。Mc Caughan[9-10]、Abed[11-12]此模型进行了分岔分析。旋转失速实验检测方面,研究者们提出了许多旋转失速检测方法[13-16],这些检测方法多是直接对旋转失速的初期扰动的检测,而根据Abed[12]的分岔分析结果,在3阶常微分Moore-Greitzer模型中旋转失速的出现对应于1个亚临界pitchfork分岔的产生,因此对压气机旋转失速的检测可以转化成对亚临界pitchfork分岔的检测。
本文意在利用模式识别方法识别该系统中亚临界pitchfork分岔。利用确定学习理论方法[17-21],将亚临界pitchfork分岔的检测分为2部分,即辨识和识别。辨识方面,研究对Moore-Greitzer模型系统动态的辨识。当模型中的参数不同时,系统产生的动态模式不同。对于不同的动态模式,利用确定学习方法,构建自适应RBF神经网络模型对系统内部动态进行辨识。识别方面,利用辨识阶段建立的动态模式库构造动态估计器。然后利用相似性定义,判断测试模式与模式库中的模式的相似性,误差最小的模式即被认为是与测试模式相同的模式。若系统即将发生亚临界pitchfork分岔,系统的内部动态与模式库中临近分岔的模式相吻合,即可认定系统即将发生亚临界pitchfork分岔。
1 预备知识和问题描述
1.1 旋转失速模型及其分岔分析
Moore-Greitzer模型中用到的部分符号见表1。
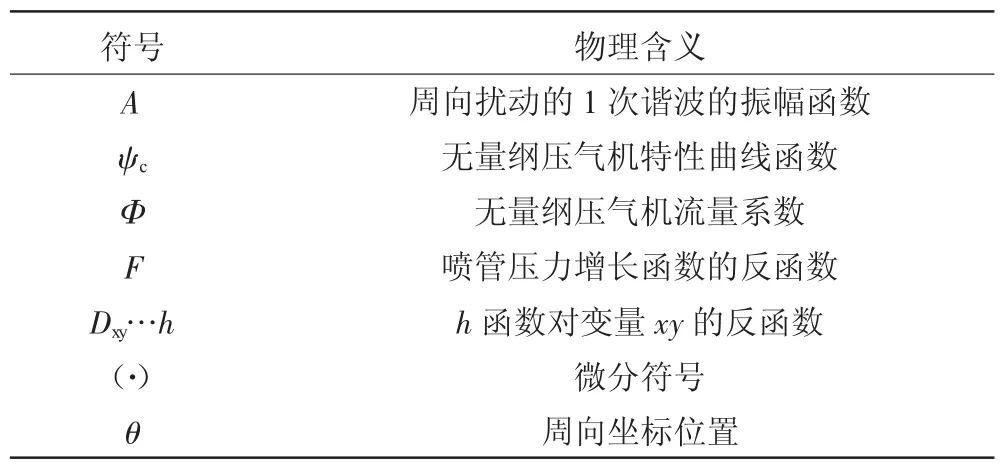
表1 Moore-Greitzer模型符号
利用表1中定义的相关变量,3阶Moore-Greitzer模型表达如下
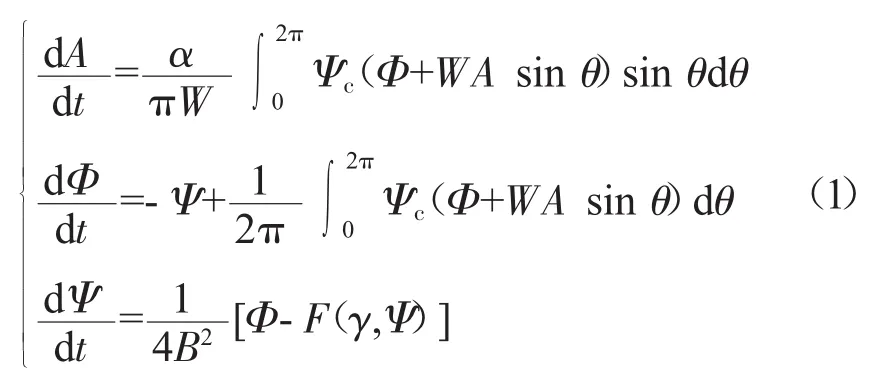
式中:W和α均为常数;γ为与喷管开度相关的系统参数;B为与转子速度成正比的无量纲参数;F为喷管特性曲线的反函数,是1个随自变量γ和Ψ严格递增的函数。
根据Abed[12]对系统(1)分岔特性的分析,给出2个引理:
引理1:当Ψ'c(Φ0(γ))<0时,系统(1)的标称平衡点x0(γ)是渐近稳定的;而当Ψ'c(Φ0(γ))<0时,系统(1)的标称平衡点x0(γ)是不稳定的。
引理2:假设Ψ"c(Φ0(γ))≠0且F是关于其所有自变量严格递增的。另外假设稳定性系数β2不为零。那么在平衡点(x0,γ0)处γ的微小改变将使系统(1)出现pitchfork分岔。且当β2<0(β2>0)时,该pitchfork分岔为超临界(亚临界)pitchfork分岔,即在平衡点(x0,γ0)附近产生的新的平衡点是渐进稳定(不稳定)的。
根据引理1,在参数γ通过临界值γ0之后,轴流压气机系统(1)的非失速平衡点将不稳定。
本文将平衡点(x0,γ0)称为旋转失速先兆点。而根据引理2,失速先兆点附近的局部分岔解可能是不稳定的,这类分岔被称为亚临界分岔。当参数γ通过临界值γ0时,如果亚临界分岔发生的条件成立,压气机系统将从稳定平衡点处掉到不稳定平衡点。导致压气机系统动态随参数γ在γ0附近变化时出现1个时滞环,文献[12]的仿真结果说明了系统的分岔特性。
1.2 确定学习理论
本文将使用的辨识旋转失速模型系统动态的理论方法,即确定学习理论。确定学习理论[17-19]运用自适应控制和非线性动力学系统的概念与方法,研究未知动态环境下的知识获取、表达、存储和再利用等问题。通过选择局部RBF神经网络作为参数化的模型结构,对于周期轨迹或者更一般的回归轨迹,RBF神经网络中沿着回归轨迹的神经元函数构成的子向量可以满足部分持续激励条件。对于连续非线性系统的辨识问题,沿着由非线性系统产生的周期或回归轨迹,部分持续激励条件可以使辨识误差系统满足指数稳定,并因而在沿周期或回归轨迹的局部区域实现对非线性系统动态的准确神经网络逼近。这样依靠动态环境下的系统状态信息,确定学习可以对非线性系统的未知动态进行局部准确建模。
通过1类非线性动态系统说明确定学习的基本方法。考虑如下的非线性动态系统

式中:x=[x1,x2,…,xn]T∈Rn,是可测量的系统状态;p为系统的常值参数向量(通常不同的p产生不同的动态行为);F(x;p)=[f1(x;p),f2(x;p),…,fn(x;p)]T,表示系统(2)的未知系统动态;fi(x;p)为未知的连续非线性函数。
针对系统(2),假设系统状态x保持一致有界(如x(t)∈Ω⊂Rn,∀t≥t0),其中Ω是1个紧集;且始于初值x0的系统轨迹φζ(x0)是回归轨迹。
基于以上假设,确定学习理论采用如下的动态RBF神经网络辩识系统(2)的未知系统动态[18]

神经网络权值估计通过如下自适应学习率调节[18]

确定学习理论[18-19]指出,对于周期轨迹或者更一般的回归轨迹,RBF神经网络中沿着回归轨迹的神经元函数构成的子向量可以满足部分持续激励条件。即靠近轨迹φζ(x0)的神经网络回归向量Sζ满足部分持续激励条件,部分持续激励条件可以使得辨识误差系统满足指数稳定,进而在沿周期或回归轨迹的局部区域实现对非线性系统动态的准确神经网络逼近[18]

这就实现了对非线性系统的未知动态进行局部准确建模。
1.3 问题描述
考虑系统(1)并分析第2部分对此模型的分岔分析结果,本文主要目的是利用确定学习理论方法为轴流压气机系统中存在的分岔建立1个预测方法。由于在大多数压气机中旋转失速都先于喘振发生,而旋转失速又对应于压气机系统(1)中的亚临界pitchfork分岔,因此更具体地说,本文目的是利用确定学习方法预测压气机系统(1)存在的亚临界pitchfork分岔。进一步将此目的一分为二。首先,利用确定学习去辨识压气机系统(1)的系统动态,并将系统对应于不同参数情况下的系统动态表达成常值的神经网络,这些常值神经网络是对系统的时变动态的1个局部准确表达。然后将每个常值神经网络存储的系统动态定义为1个训练模式,并将这些动态模式组成1个模式库。尤为重要的是,将参数γ临近γ0时对应的模态定义为临界模态,这个模态在预测pitchfork分岔时起关键作用。其次,利用1个参数随时间变化的系统(1)的动态当做测试模式。当这个测试模式进入模式库时,将利用模式库中的所有训练模式与其构成相应的误差系统。误差系统中误差最小的模式即为系统运行所处的模式。当系统运行到达临界模式时,测试模式与临界模式所构成的误差系统的状态将为最小,则可认定系统已进入临界区域,表明系统即将发生亚临界pitchfork分岔,据此可以预警,建立1个预测(或预防、预警)方法。
2 旋转失速模型的系统辨识
旋转失速Moore-Greitzer模型的系统辨识方法,即如何利用确定学习算法对Moore-Greitzer模型的系统动态进行辨识。考虑系统(1),假设x=[x1,x2,x3]T=[A,ΦΨ]Τ,那么该系统可以改成如下形式
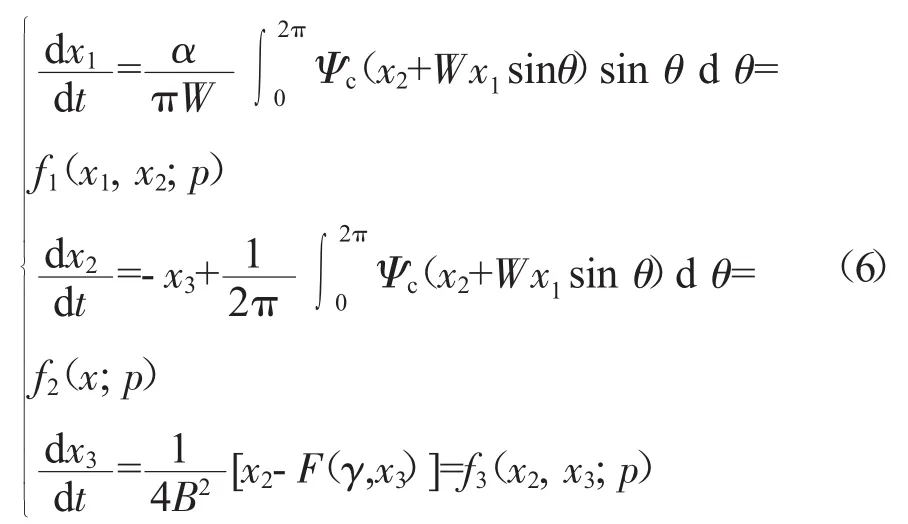
式中:p=[α,W,B,γ]T,为系统参数向量。针对系统(6),构造如下的动态RBF神经网络辨识其主要内部动态

针对式(7)中3个神经网络,分别对其设计如下的自适应权值调节率
再将式(8)中的各分量与式(6)中的相应分量做差可得以下状态估计误差系统
依据式(8)所示的权值更新率,可以得到以下权值误差系统
根据RBF神经网络的局部精确的逼近能力,可将状态估计误差系统(9)的第i个子系统和权值误差系统(10)的第i个子系统沿着系统轨迹分解成靠近系统轨迹和远离系统轨迹的2部分,得到如下表达式
式中:(·)ζi和(·)ζ¯i分别为靠近和远离轨迹φζ的部分;为靠近系统轨迹部分的子向量为对应Sζi的神经网络权值子向量
依据文献[18]中的定理2.7,任何周期或者回归轨迹都可使Sζi满足持续激励条件,从而使得中心点靠近轨迹的神经元的权值指数收敛到其最优值而中心点远离系统轨迹的神经元的权值几乎保持不变,即总是很小且几乎不变,则
根据确定学习理论方法,只需设计合理的参数ki、σi、Γi,便可利用式(7)所示的动态RBF神经网络实现对系统(6)的动态f1、f2、f3的近似准确逼近
对神经网络权值估计值在其收敛的一段时间内求平均得到

式中:tb>ta>0,为权值收敛后的小的时间瞬态过程,利用以上获得的常值神经网络权值可得到3个常值的RBF神经网络使得式(15)成立,其中|εi|=0(|εi|)。
3 旋转失速模型的动态模式库的建立和亚临界pitchfork分岔的识别方法
旋转失速模型动态模式库中既包括旋转失速模型的正常模式,也包含临近亚临界pitchfork分岔的模式。然后定义动态模式的相似性,基于相似性的定义和所建立的动态模式库,提出1种识别亚临界pitchfork分岔的方法。
3.1 旋转失速模型的动态模式库的建立
第1.1节分析了旋转失速Moore-Greitzer模型的分岔时选取的分岔参数是γ。Moore-Greitzer模型的系统动态随着γ的改变逐渐变化,即随着参数γ的改变,可以得到系统的不同动态模式。而由于系统参数值的任意性,Moore-Greitzer模型必定存在无数种动态模式,要遍历所有模式显然不可行。因此选取其中K种典型的系统模式,这K种模式既包括旋转失速模型的正常模式,也包含临近亚临界pitchfork分岔模式。依照系统(6),把产生以上第m=1,2,…M种模式(记为φm)的系统表示成如下形式

式中:xm(t0)为系统的初始条件,且系统参数pm=[α,W,B,γm]T表示系统的不同动态模式是因γ参数的改变而产生。此处选取的γ包括远离γ0和接近γ0的值。其中,γ值远离γ0的系统所产生的模式被定义为正常模式;γ值临近γ0的系统所产生的模式被定义为临近亚临界pitchfork分岔模式。这些模式将是预测亚临界pitchfork分岔的关键。本文将以上M种模式定义为K种训练模式。
对第m=1,2,…,M种训练模式按照式(7)、(8)构造如下动态RBF神经网络和神经网络权值估计更新率
式中:i=1,2,3。
式中:εi为近似逼近误差。
3.2 旋转失速模型的动态模式的相似性定义
为识别Moore-Greitzer模型的亚临界pitchfork分岔,定义动态模式的相似性,这是识别阶段用于判断压气机处于何种模式的基础。
定义1:对由系统(16)产生的2个动态模式φm和φn,若动态模式φm的状态xm处于动态模式φn的状态xn的小领域内,同时2个动态模式的主要内部动态之间的差异非常小,即

式中:ε*为1个小的正常数;x∈φm,为动态差异,是沿着模式φm的轨迹做比较的。那么称动态模式φm相似于动态模式φn,其中ε*是相似性度量。
定义2:对由系统(16)产生的2个动态模式φm和φn,若动态模式φm的状态xm处于动态模式φn的状态xn的小领域内,同时2个模式内部动态的常值神经网络表达差异较小,即

基于以上动态模式相似性定义,确定学习理论提出的动态模式识别方法指出2个动态模式之间的状态差异正比于相似性度量[19]。因此,可以利用状态差异作为判别2个动态模式是否相似的状态变量。
3.3 旋转失速模型中亚临界pitchfork分岔的预测
利用第3.1节对压气机旋转失速模型所建的动态模式库和第4.2节中关于动态模式的相似性定义,提出1个预测旋转失速模型(Moore-Greitzer模型)亚临界pitchfork分岔的方法。
考虑如下的待识别系统

该系统跟Moore-Greitzer模型(6)的结构相同,只是参数pt可能不同,上标t表示该系统为待识别系统,并称由该系统产生的动态模式为测试模式。

将动态估计器(22)和被检测压气机系统(21)做差,可以得到如下的残差系统

因此,如果压气机系统(21)正处于第s种模式,则残差系统(23)可改写为

则第s个估计器的残差系统为

依据确定学习理论的动态模式识别方法,旋转失速快速检测的核心是利用被检测压气机系统的内部动态与动态估计器的内部动态之间的相似性。具体而言,如果动态模式s发生,则被检测压气机系统(21)的状态与估计器s的状态最相似,从而使得二者之间的残差是所有残差中最小的。尤其是当被检测压气机系统(21)即将出现亚临界pitchfork分岔时,其与模式库中对应的临近亚临界pitchfork模式的残差就变为最小,即可预测亚临界pitchfork分岔的发生。基于最小残差原理,可定义如下检测策略[20]。
亚临界pitchfork分岔识别策略:如果对所有的r∈{1,2,…,K}/{s}存在1个有限时间(ts)||对t>ts成立,则认定亚临界pitchfork分岔模式s发生,表明亚临界pitchfork模式即将发生,可以预警。
4 结束语
基于确定学习理论提出了1种针对Moore-Greitzer模型系统动态的辨识方法;基于动态模式识别方法,提出了针对Moore-Greitzer模型的动态模式库构建及亚临界pitchfork分岔预测方法。
本文方法可进一步向高阶发动机动态模型推广使用,并最终用于预测航空发动机旋转失速的理论及试验研究。
[1] Moore F K,Greitzer E M.A theory of post-stall transients inaxial compression systems(partⅠ):development of equations[J].Journal of Engines for Gas Turbines and Power,1986,108(1):68-76.
[2] Moore F K,Greitzer E M.A theory of post-stall transients inaxial compression systems(partⅡ):application[J].Journal of Engines for Gas Turbines and Power,1986,108(2):231-239.
[3] 蒋康涛.低速轴流压气机旋转失速的数值模拟研究[D].北京:中国科学院工程热物理研究所,2004.JIANG Kangtao.Numerical investigation on rotating stall in a low-speed axial compressor[D].Beijing:Graduate School of the Chinese Academy of Sciences,2004.(in Chinese)
[4] Greitzer E M.The stability of pumping systems—the 1980 freeman scholar lecture[J].ASME Journal of Fluid Engineering,1981,103(2):193-242.
[5] 吴艳辉,楚武利,张皓光.轴流压气机失速初始扰动的研究进展[J].力学进展,2008,38(5):571-584.WU Yanhui,CHU Wuli,ZHANG Haoguang.A review of studies on stall precursors in axial-flow compressor[J].Advances in Mechanics,2008,38(5):571-584.(in Chinese)
[6] Emmons H W,Pearson C E,Grant H P.Compressor surge and stall propagation[J].Transactions of the ASME,1955,77(3):455-469.
[7] Greitzer E M.Surge and rotating stall in axial flow compressors(partⅠ):theoretical compression system model,and(partⅡ):experimental results and comparison with theory[J].ASME Journal of Engineering for Power,1976,98(2):190-217.
[8] Abed E H,Houpt P K,Hosny W M.Bifurcation analysis of surge and rotating stall in axial flow compressors[J].AMSE Journal of Turbomachinery,1993,115(4):817-824.
[9] Mc Caughan F E.Application of bifurcation theory to axial flow compressor instability[J].Journal of Turbomachinery,1989(111):426-433.
[10]Mc Caughan F E.Bifurcation analysis of axial flow compressor stability[J].SIAM Journal on Applied Mathematics,1990,50(5):1232-1253.
[11] Abed E H,Houpt P K,Hosny W M.Bifurcation analysis of surge and rotating stall in axial flow compressors[J].AMSE Journal of Turbomachinery,1993,115(4):817-824.
[12] Liaw D C,Abed E H.Control of compressor stall inception:a bifurcation-theoretic approach[J].Automatica,1996,32(1):109-115.
[13] Mcdougal N M,Cumpsty N A,Hynes T P.Stall inception in axial compressors[J].ASME Journal of Turbomachinery,1990,112(1):116-125.
[14] Tryfonidis M,Etchevers O,Paduano J D,et al.Prestall behavior of several high-speed compressors[J].ASME Journal of Turbomachinery,1995,117(1):62-80.
[15] LIAO S F,Chen J Y.Time frequency analysis of rotating stall by means of wavelet transform[R].ASME 1996-GT-57.
[16] TAN C S,Day I,Morris S,et al.Spike-type compressor stall inception,detection,and control[J].Annu.Rev.Fluid Mech,2015,42(1):275-300.
[17] WANG C,CHEN T R,Chen G R,et al.Deterministic learning of nonlinear dynamical systems[J].International Journal of Bifurcation and Chaos,2009,19(4):1307-1328.
[18] WANG C,Hill D J.Deterministic learning theory for identification,recognition and control[M].Florida:CRC Press,2009:158-173.
[19] WANG C,Hill D J.Deterministic learning and rapid dynamical pattern recognition[J].IEEE Transactions on Neural Networks,2007,18(3):617-630.
[20] WANG C,CHEN T R.Rapid detection of small oscillation faults via deterministic learning[J].IEEE Transactions on Neural Networks,2011,22(8):1284-1296.
[21] Bin XU,Chenguang YANG,Zhongke SHI.Reinforcement learning output feedback NN control using deterministic learning technique[J].IEEE Transactions on Neural Networks and Learning Systems,2014,24(3):635-641.
Precursor for Bifurcation of Axial Compression System based on Deterministic Learning
WEN Bin-he1,WANG Cong1,YI Xue-fei1,WEN Wei1,ZHU Ai-feng1
(1.AECC Aero Engine Control System Institute,Wuxi Jiangsu 214063;2.College of Automation Science and Engineering,South China University of Technology,Guangzhou 510641)
Aiming at bifurcation prediction problem in axial compression system,the bifurcation behavior of the system was analyzed based on simplified Moore-Greitzer model.Several typical patterns generated by varying in Moore-Greitzer model were identified by deterministic learning,the obtained knowledge were stored in constant RBF networks to form the pattern library finally.A dynamic estimator which was embedded in the constant RBF networks estimators was constructed using the pattern library.Comparing the set of estimators with the test pattern,a set of residual error was generated.Pitchfork bifurcation was predicted by using minimum residual of dynamical pattern recognition.
pitchfork bifurcation;rotating stall;deterministic learning;system identification;dynamical pattern recognition;rapid detection;axial compressor
V 233.7+1
A
10.13477/j.cnki.aeroengine.2016.06.004
2016-05-01基金项目:航空动力基础研究项目资助
文彬鹤(1987),男,主要从事航空发动机控制系统设计工作;E-mail:bhwen5516521@126.com。
文彬鹤,王聪,易学飞,等.基于确定学习理论的轴流压气机系统分岔预测[J].航空发动机,2016,42(6):23-29.WEN Binhe,WANG Cong,YI Xuefei,et al.Precursor for bifurcation of axial compression system based on deterministic learning[J].Aeroengine,2016,42(6):23- 29.
(编辑:赵明菁)