基于STM32单片机的双轮自平衡小车系统的设计
2016-12-06徐锦
徐 锦
(长安大学 电子与控制工程学院,西安 710021)
基于STM32单片机的双轮自平衡小车系统的设计
徐锦
(长安大学 电子与控制工程学院,西安 710021)
本文介绍了基于 STM32F103C8T6 单片机的双轮自平衡小车系统的设计,以 MPU6050 三轴陀螺仪加速计为传感器的姿态感知系统,通过卡尔曼滤波对传感器的数据进行滤波融合,采用 PID 算法实现小车两轮自平衡,使用 TB6612 电机驱动模块实现小车的驱动电机,综合实现小车的直立行走。通过蓝宙的线性 CCD 实现小车的循迹功能。
姿态感知;卡尔曼滤波;PID控制;MPU6050三轴陀螺仪加速计;TB6612电机驱动;线性CCD
1 电路设计
1.1 MPU6050三轴陀螺仪加速计模块子系统框图
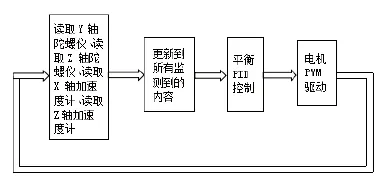
图1 MPU6050三轴陀螺仪加速计模块子系统框图
1.2 TB6612电机驱动模块子系统框图
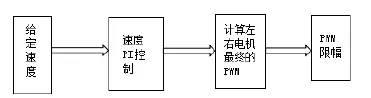
图2 TB6612电机驱动模块子系统框图
1.3 线性CCD模块子系统框图
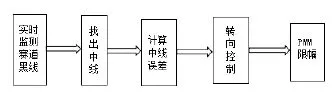
图3 线性CCD模块子系统框图
2 程序设计
2.1 程序功能描述
(1)实现直立平衡控制
(2)平衡的基础上实现行走
(3)进而实现循迹功能
2.2 程序设计思路
首先写程序要有整体思路,小车最先应该让电机先转,然后达到平衡的目的,利用MPU6050三轴陀螺仪加速计为传感器的姿态感知系统,通过卡尔曼滤波对传感器的数据进行滤波融合,采用PID算法实现小车两轮自平衡,使用TB6612电机驱动模块实现小车的驱动电机,综合实现小车的直立行走,差速转向。进而写出线性CCD的部分程序。
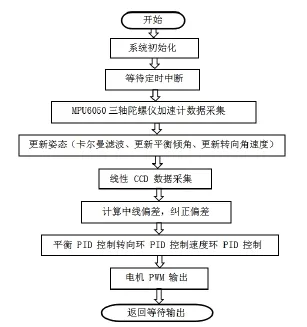
图4 主程序流程图
所以程序中应该有平衡部分,速度控制部分,转向控制部分,然后应该根据芯片与电路的链接方法,写出芯片的初始化程序。
3 测试分析与结论
3.1 根据直立控制调试,由此可以得出结论见表1,表2
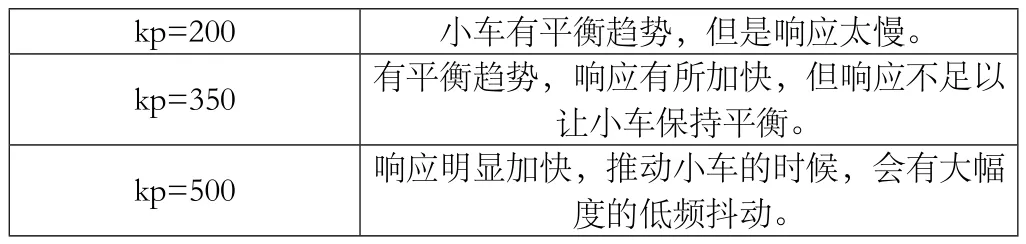
表1 kp大小测试(kd=0)

表2 kd大小测试(kp=500)
(1)可以确定得到kp=500,kd=1.7是P、D参数的最大值;(2)对每个系数乘以0.6,取整得到kp=300,kd=1,为理想的值。(3)小车的机械中值在0°。
3.2 根据速度控制调试,由此可以得出结论见表3
(1)kp=80,ki=kp/200是速度控制P、I参数的理想值;(2)kp=80,ki=kp/200是正极性。
平及需求。
3.2.3 项目定位
在前期工作的基础上进行房地产项目定位,产品要考虑消费者的需求,要有效弥补市场供应的空白。同时要充分考虑项目品牌的培育,通过成功的项目口碑带动开发商品牌的树立,让企业品牌增值。
3.2.4 投资分析
对定位后的房地产项目进行投资分析,估算项目投资、销售收入、成本等基础数据,计算项目的投资收益率、净现值、内部收益率等基本评价指标,对项目的财务可行性进行论证。
3.2.5 产品设计
房地产项目产品设计主要包括规划设计、建筑风格设计、绿化系统设计和公共配套设施规划等。充分考虑市场需求、消费者心理需求,凸显现代、活力、地区文化、客户群、生态绿化、公共配套设施等因素,进行系统规划设计,力求产品符合市场和消费者的需求。
近年来,国家不断调整银行贷款政策、经济调控、土地等政策,房地产市场的竞争不断加剧,房地产开发风险性加剧。对于房地产企业来说,应该做好房地产前期策划工作,以便于增强房地产开发项目的竞争能力,解决企业管理问题,更加有效地整合房地产项目资源[4],提高房地产企业的市场竞争能力。
[1]刘青.浅析房地产开发前期市场定位策划[J].建材发展导向,2013(05).
[2]华彦,刘军.房地产项目前期策划工作浅析[J].建筑工程,2015(02).
[3]刘新宇.探讨房地产项目开发前期策划[J].江西建材,2015.
[4]高非凡.基于房地产开发项目前期策划的研究[J].城市建设理论研究,2015(05).
10.16640/j.cnki.37-1222/t.2016.21.234
丛苏莉,女,硕士研究生,讲师,研究方向:建设工程管理、房地产经营与管理等。
