摇板式造波实验台的设计及实验
2016-12-05陈俊华王丁一程少科
陈俊华, 王丁一, 程少科, 李 越
(1. 浙江大学 宁波理工学院, 浙江 宁波 315100; 2. 太原科技大学 机械工程学院, 山西 太原 030000)
摇板式造波实验台的设计及实验
陈俊华1, 王丁一2, 程少科2, 李 越2
(1. 浙江大学 宁波理工学院, 浙江 宁波 315100; 2. 太原科技大学 机械工程学院, 山西 太原 030000)

分析了摇板造波理论,基于体积不变原则,即在一定条件下摇板排开水的体积等于波浪的体积,推导得到新的摇板造波传递函数。为了验证该传递函数,设计了摇板式造波实验台的机械结构和运动控制系统,并在试验水池中进行安装调试。实验表明,该造波实验台具有良好的频响特性。同时通过试验对比发现:基于体积不变原理的造波传递函数相对于基于势流理论的造波传递函数具有一定的局限性。只有在中频段造波时推导的造波传递函数更加符合实际传递函数;在低频段和高频段时,因为水流逸散以及波浪的非线性,推导的造波传递函数不能很好起作用。
造波; 摇板; 水池; 传递函数
0 引 言
海浪是水质点在它的平衡位置附近产生一种周期性的运动和能量传播,威力十分巨大,它是影响海洋工程最重要的环境因素。海洋工程平台和船舶常常受到波浪力的作用,导致结构疲劳,事故频发[1]。
所以迫切需要在试验设计阶段,试验模型能够在试验水池中模拟受到波浪冲击。
造波实验平台可以在试验水池中进行各种造波模拟,是船舶、港工、波浪发电装置进行模拟试验的重要设备,是模拟海洋环境必不可少的装置[2]。国内从20世纪50年代开始造波试验水池方面的研究。50年代初期,我国成功研制第一台规则波造波机;70年代末,大连理工大学海岸和近海工程国家重点实验室研制了我国第一台不规则波造波机——调频式造波机。与此同时,我国还从国外引进大型水槽的不规则造波机以及多项不规则造波机等实验装置。
在借鉴和消化吸收的基础上,我国多家科研单位开始研制低惯量电机驱动的不规则造波机和电液压伺服不规则造波机[3]。20世纪90年代后,因为计算机的普及,国内许多院校都开始造波试验水池研究,各种造波实验平台层出不穷。
本文在浙江大学宁波理工学院国家海洋养殖装备研发服务中心的试验水池中进行造波实验台的设计、安装、调试。采用摇板造波方式,并对其传动机构、摇板机构、伺服系统及运动控制系统、造波程序进行了设计及搭建试验。
1 造波机理
造波机采用摇板造波方式。在一定水深的试验水池中竖立7组摇板,通过传动机构驱使摇板往复运动时,水质点受到摇板的作用力离开平衡位置,重力作为恢复力又使质点回到平衡位置,但由于惯性,水质点在回到平衡位置时将继续向前运动。这样恢复力又作用于水质点,此时,水质点将反复振荡,在自由表面上形成波浪[4-5]。
1.1 摇板造波理论
一般造波理论通过势流理论,设立边界条件,采用Laplace方程来求解速度势,推导得波高与摇板的传递函数[6],如下式所示:

(1)
式中:H为波高;So为冲程;h为水深;d为板浸水深度。
试验水池是一个封闭的空间,在摇板运动过程中,假设水无黏性、不可压缩、无旋。摇板运动如图1所示,当造波频率不是很高时,摇板从P位置运动到N位置,速度一定时,可以将摇板排开的水看作整体V1,将板前的波浪体积看成整体V2,这两者体积是近似相等的,这样假设可以大大地降低计算的复杂度。
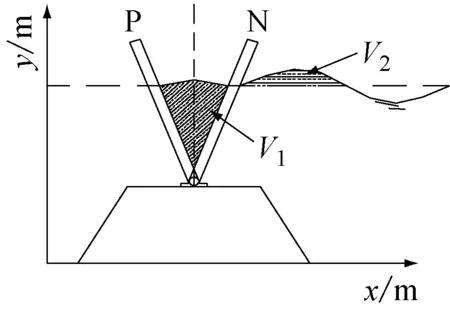
图1 公式推导示意图
1.2V1的计算
摇板运动参数如图2所示。摇板从初始位置P运动到对称N位置过程中,假设水无黏性、不可压缩、无旋,摇板排开水的体积V1的推导如下。

图2 摇板运动参数示意图
摇板上不同水深处摇板的摆幅:
(2)
式中:E为水面处的摇幅。
摇板的水平位移:

(3)
摇板的水平速度:
(4)
摇板的水平加速度:
(5)
当摇板从P运动到N的过程中,造波板处波浪的速度为u(t),因此,
(6)
式中:A1为V1的截面积,A1=0.5θl2;l为摇板入水深度。
1.3V2的计算
由于摇板的扰动,图3中V2部分水体从静止开始运动。由于V1部分水的速度远大于V2部分水的速度,因此使得V2部分的水面爬高,产生了波浪。
距离摇板底部不同高度处摇板的速度不同,从摇板底铰链连接处以上,不同高度的水流以不同的水平速度向右传播,而且水面上的运动速度较快,距离水面d深处的水运动速度较慢,几乎接近于0。由于这部分水的体积较大,速度较慢,此时水流流动的速度即为波速,即为u2。这部分水向右传播带动后面的水体进行运动,由于u1远远大于u2,所以在试验水池中产生了波峰。因此,

图3 波浪参数示意图
(7)
式中:A2为V2的截面积;u2为波速,u2=λ/T。
(8)
由波浪的连续性方程,可知整个控制体的体积流量相等,V1=V2,即
(9)
得:
(10)
(11)
式中:λ为波长。式(10)即为试验水池中的摇板运动下的波高公式。可见,波高H与摇板角度、摇板周期、摇幅、摇板入水深度和波长均有关。
2 造波实验平台设计
2.1 实验台设计方案
造波实验台主要由造波机和控制单元两部分组成。其中实验水池的尺寸为:长70 m,宽4 m,高2.5 m,如图4所示。

图4 实验水池
为了进行各类海洋工程平台的模拟试验,如网箱的抗风浪能力、船体的耐波性能,以及波浪力作用于平台的性能试验,需要模拟特殊波浪,如斜波[7]、长峰规则波[8]、聚焦波等[9]。聚焦波是造波实验台产生的高频(短波)至低频(长波)在某一时刻叠加时的波,其模拟主要取决于造波机生成高频波的能力;斜向波是分段式造波机产生的,根据相邻两造波单元之间始终保持固定的相位差运动,其模拟取决于多个造波单元之间的实时控制;长峰规则波是沿单一方向传播的波浪,它就是实验室产生的规则波,其模拟主要取决于其造波能力和波高、频率的调节范围。
为了满足上述要求,采用结构紧凑、控制方便、便于维护、适用于深水域造波的摇板式造波机[10]。采用数字式低惯量交流伺服电机直接驱动滚珠丝杆旋转,并经丝杆螺母副将转动转换为摇板的往复摆动[11]。
同时考虑到我国沿海海域波浪分平均周期为2.0~7.0 s[12],设模型与原型重力相似,Froude 数相同。 取比例因子λ=3,则模型试验拟造波的波周期取0.6~2.2 s。
据此,造波实验台采用7台造波机,最大设计波高为0.3 m,最高造波频率为2 Hz,最大工作水深1.6 m。整体造波实验台结构如图5所示。

1-前支撑座, 2-滚珠丝杆, 3-底板, 4-鱼眼连接头, 5-丝母座,6-后支撑座, 7-联轴器, 8-伺服电机, 9-摇板, 10-侧翼板,11-铰链, 12-底座
2.2 传动机构设计
传动机构采用滚珠丝杠副。滚珠丝杠能够将电机的转动转换为螺母副的往复运动,从而带动摇板往复摆动。因为是利用滚珠运动,所以启动力矩极小,启动时无颤动,低速时无爬行现象,因此可以精密地控制进给。
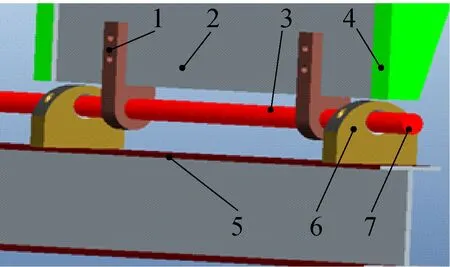
丝杆支撑采取两端轴向固定的支撑形式,并通过两根光轴增加丝杆副刚度和同轴度,其结构图如图6所示,实物装配图如图7所示。

图6 传动机构示意图

图7 传动机构装配图
2.3 伺服驱动设计
相对于直流电机和液压伺服系统,数字式低惯量的交流伺服电机在伺服精度、响应的快速性和控制的灵活性,以及具有很硬的机械特性和很强的过载能力[13]。通过控制器能够实时地控制和观测电机的运动。在选择交流伺服电机时,主要考虑3方面的因素:转矩匹配、惯量匹配及功率匹配。本实验平台采用7台3 kW高性能A2伺服驱动设备,内置运动控制模式,支持多种轴控操作要求。
2.4 摇板机构设计
摇板运动机构主要分为螺母副与摇板之间的传动机构、摇板与水下基座的连接机构。
摇板与水下基座的连接需要考虑7个摇板的同轴度以及水平、摇板摆动角度、拆卸更换零件便利等诸多因素,故采用图8所示的设计方式。该方案通过一根主轴贯穿7台摇板机构,便于安装并且能够保证7台摇板机构的同轴度。
1-U型连接, 2-摇板, 3-连接轴, 4-侧板, 5-底座, 6-支撑座
螺母副与摇板之间的传动机构采用鱼眼轴承连接头连接,这是一种柔性连接,即使安装有一些尺寸偏差,对装备运行也没多大的影响,能够有效地减少因安装偏差所导致的能量传递损耗。两端鱼眼连接头通过一段螺柱连接,所以能够调节连接机构的长度,能调整摇板初始角度。结构如图9所示。

图9 摇板的连接机构
3 运动控制系统设计
3.1 控制系统组成
摇板造波实验台控制系统的核心是Beckhoff PLC。根据控制系统的结构及设计要求,整个控制系统分为3部分,伺服电机运动控制模块,开关量、模拟量输入模块,反馈调节模块[14]。系统组成框图如图10所示。
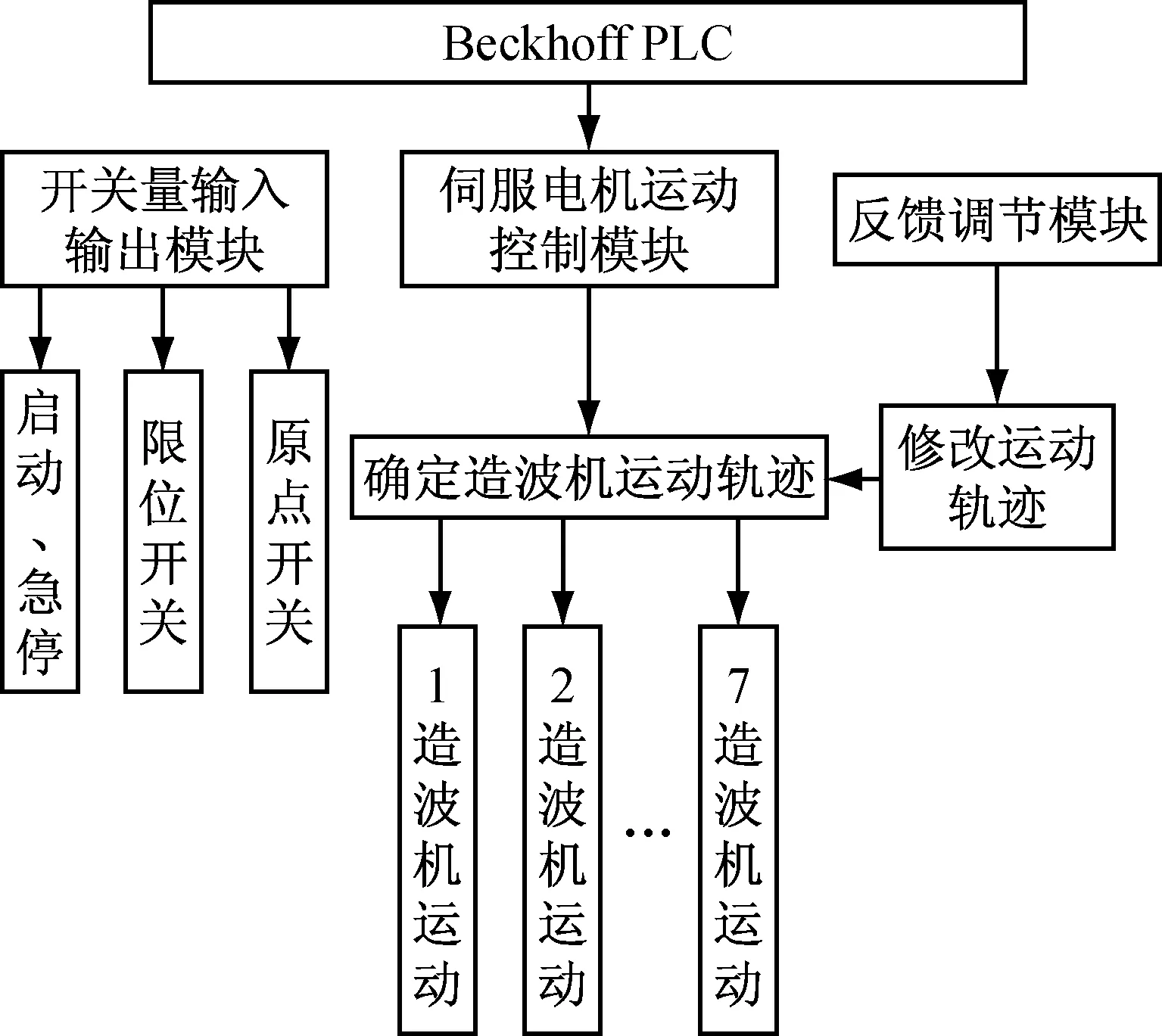
图10 控制系统结构图
伺服电机运动控制模块主要通过TwinCAT软件中的电子凸轮设计编辑工具进行控制。电子凸轮称为Electronic CAM,是从传统机械式凸轮的一种演变而来。通过设计不同的凸轮曲线,当从轴耦合到主轴时,从轴能够随着主轴运动而按照设定的运动轨迹进行运动[15]。电子凸轮能够设计出各类复杂的运动轨迹,满足绝大多数用户要求。并且凸轮曲线的修改十分方便,当控制器接收到波高仪的模拟信号时,能根据目标波高与实际波高的差值来调整运动轨迹曲线,通过调整主、从轴的补偿值和范围值能够调整运动轨迹的周期和运动行程。当需要产生规则波时,则要求摇板的运动轨迹为正弦曲线,其凸轮曲线运动轨迹如图11所示。

图11 规则波凸轮曲线轨迹
3.2 控制系统搭建
摇板造波试验平台控制系统主要由造波机左右极限开关,原点开关,工控机,Beckhoff输入、输出模块,伺服驱动器,波高仪等组成。组装如图12所示。
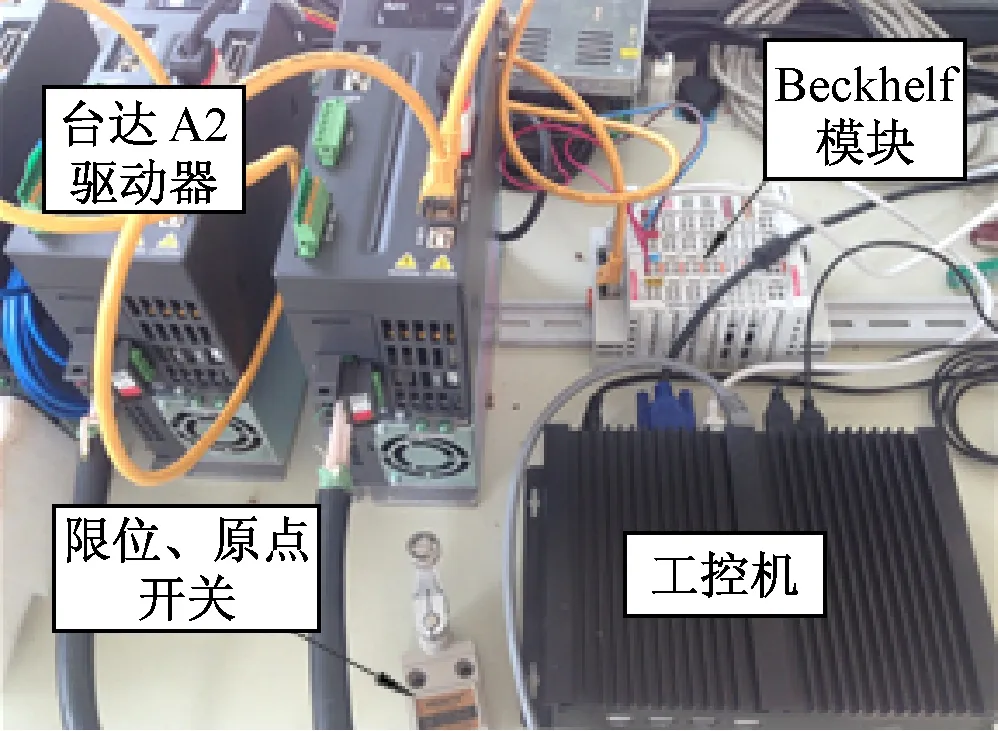
图12 控制系统搭建
4 实验台测试
实验中采用的水池布局图如图13所示。X轴方向代表波浪前进方向,Y轴方向垂直于造波机。在水池中间轴线上距离摇板45 m处安装一个波高仪,60 m处放置消波装置,后面的方形水池也能够有效地减少波的反射,起到消波作用。

图13 水池布局图
本次试验选取的波浪频率为0.2~2.1 Hz的正向规则波,频率间隔0.1 Hz。造波板初始角度垂直于水面,并且浸水深度为1.46 m,因为安装误差问题,造波机最大行程为1.3 m。实验中分别采用两种传递函数进行试验。其中Ra为基于势流理论得到的理论传递函数;Ro为基于体积不变理论得到的传递函数。
通过造波,采集波浪数据,并对波浪时历进行分析,得到试验结果,以Ra为传递函数的试验工况如表1所示;以Ro为传递函数的试验工况如表2所示。
5 结果分析
采集、分析、记录波高仪的数据,得到波长和实测波高Hm;再根据传动机构运动行程得到水线处摇板运动幅值Xa,进而可以得到造波机的实际传递函数R=Hm/2Xa。
图14为根据两种传递函数所生成的实际波高和理论波高的对比图。由图可知,根据Ra所生成的波高和理论波高,相比Ro所生成的波高整体上更加接近理论波高,但是Ro所生成的波高在0.7~1.4 Hz时比Ra所生成的波高更加接近理论波高。然而在1.4~2.1 Hz时,与理论波高相差越来越大。
图15为Ra传递函数与实际传递函数的对比图,图16为Ro传递函数与实际传递函数的对比图。由图可进一步得知,势流理论的传递函数整体符合实际传递函数趋势。但是基于体积不变理论的传递函数在中

表1 以Ra为传递函数的试验数据表

表2 以Ro为传递函数的试验数据表

图14 波高对比图

图15 Ra传递函数与实际传递函数的对比图
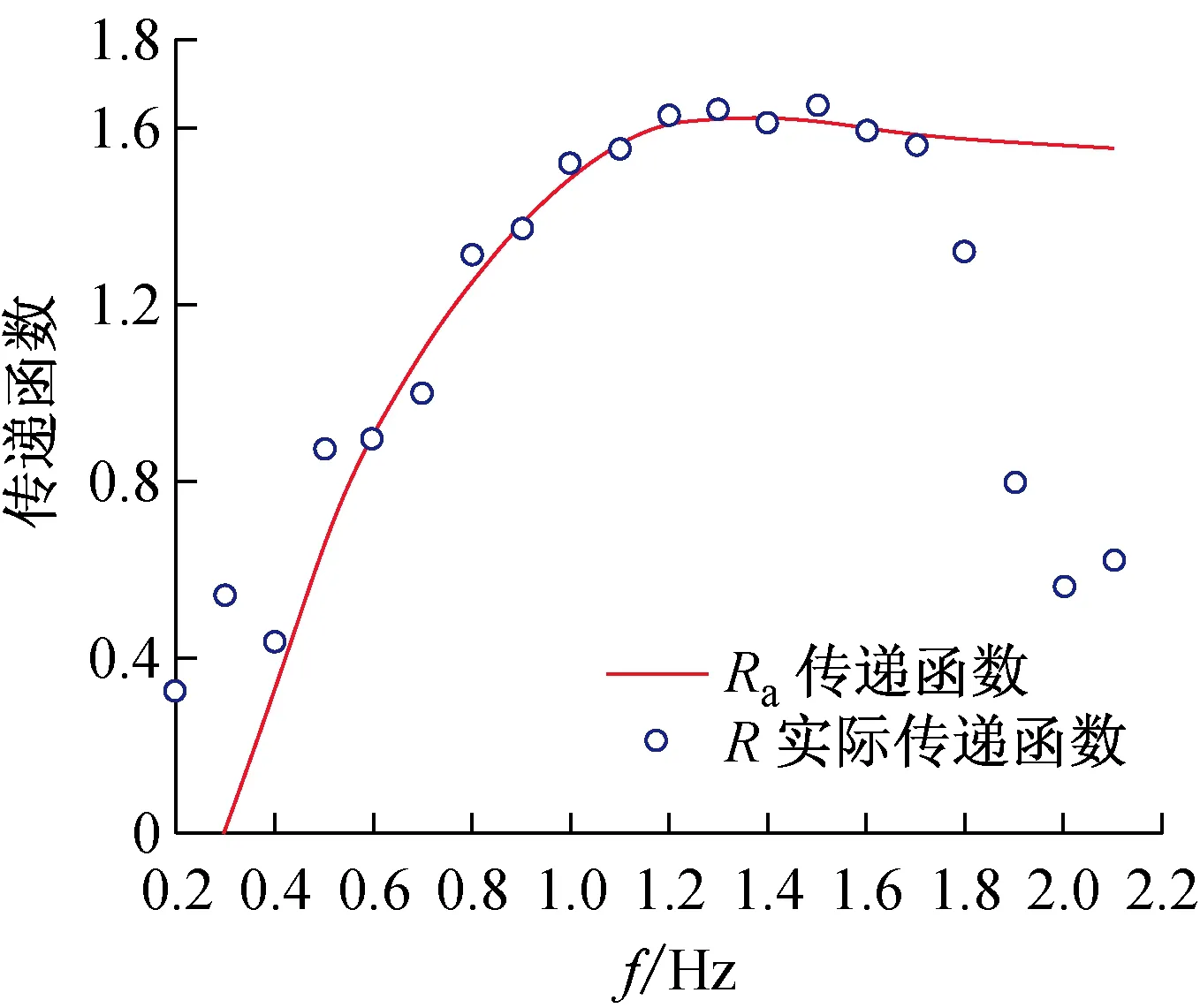
图16 Ro传递函数与实际传递函数的对比图
频区域与实际传递函数更加吻合。在近海地区这种0.7~1.6 Hz的波浪是很常见,并且这种波浪是影响海洋装备主要波段。
6 结 语
本文进行了造波试验平台的设计和造波试验。通过实验得知:摇板式造波实验台的机械机构和控制系统能实现预期的造波要求,造波实验平台具有良好的频响特性和造波能力。此外,基于体积不变原理推导的传递函数相比于势流理论推导的传递函数,在中频段更加符合实际造波要求。虽然整体上势流理论更加符合水动力学原理,能从本质上解释水波运动与传播,但是基于体积不变原理推导传递函数能极大的减少计算要求,简化模型,而且在中频段造波时误差更小。
[1] 欧进萍,肖仪清,黄虎杰,等. 海洋平台结构实时安全监测系统[J]. 海洋工程,2001,19(02):1-6.
[2] 朱 萍,黄晶华,赵丽君. 水槽造波机的参数确定及结构设计[J]. 现代电力,2011,28(4):44-48.
[3] 张少林. 基于网络的多轴运动控制技术及电子凸轮实现[D]. 武汉:华中电子科技大学,2013.
[4] 邹志利. 水波理论及应用[M]. 北京:科学出版社,2005:71-86.
[5] 邓 勇,王收军. 摇板式造波机的控制系统设计[J]. 天津理工大学学报,2002,36(6):789-791.
[6] 俞聿修. 水波理论及应用[M]. 大连:大连理工大学出版社,2000:191-197.
[7] 柳淑学. 分段式造波机生成波的方法和特性[J]. 海洋工程,1994,12(1):82-91.
[8] 贺五洲,袁亨亮,耿进柱. 板式造波机生成的长峰规则波[J]. 水力发电学报,2002,1(专刊):146-152.
[9] 李宏伟,庞永杰,孙 哲,等. 白噪声不规则波与聚焦波的水池模拟[J]. 华中科技大学学报(自然科学版),2013,41(1):89-92.
[10] 刘月琴,伊尚先. 实验室造波设备及波浪模拟技术的探讨[J]. 华南理工大学学报,2000,28(6):105-109.
[11] 李 俊,陈 刚,杨建民,等. 海洋工程试验中多单元造波机波浪模拟方法[J]. 海洋工程,2011,29(3):37-42.
[12] 张瑞波,王收军,朱国良. 伺服电机驱动式水槽造波机系统设计[J].机械设计,2007,24(10):40-42.
[13] 苏永玲,游亚戈,郑永红.Investigation on the oscillating buoy wave power device[J]. China Ocean Engineering,2002,16(1):142-245.
[14] 杨洪齐,李木国,柳淑学,等.伺服电机驱动的水槽主动吸收式造波机原理与实现[J].大连理工大学学报,2013,53(3):423-428.
[15] 鞠 波.基于倍福伺服系统的正弦振动试验装置设计[J].四川兵工学报,2013,34(11):109-112.
[16] 王宇晗,钟胜波,胡 俊.电动造波机控制系统的研究[J].上海交通大学学报,2005,39(1):134-137.
Design and Experiment of Experimental Platform of Rocker-flap Wave Maker
CHENJun-hua1,WANGDing-yi2,CHENGShao-ke2,LIYue2
(1. Ningbo Institute of Technology,Zhejiang University, Ningbo 315100, China; (2. Taiyuan University of Science and Technology, Taiyuan 030000, China)
In order to study the mechanism of the formation of waves, an experimental device is set up. By researching and analyzing the rock-flap wave-making theory, a new rock-flap wave-making transfer function is presented based on the principle of constant volume, which means that under a certain condition, the volume of water equals to the row volume of rock-flap waves. In order to verify the transfer function, a rock-flap wave test bed is designed. it includes mechanical structure and motion control system and then is installed in the test tank. Tests show that this wave-maker has good frequency response. But the transfer function based on the principle of constant volume compare to the wave-making has some limitations. The new wave-making transfer function is more precise in intermediate frequency wave-making, and in the high or low frequency band, because of nonlinear of waves and the escape of water, the new wave-making transfer function cannot work well.
wave maker; rocker-flap; tank; transfer function
2015-12-28
浙江省自然科学基金项目(LQ15E05009); 宁波市自然科学基金项目(2015A610142)
陈俊华(1964-),男,浙江宁波人,博士,教授,研究生导师,从事新能源装备及海洋机电装备研究。
Tel.:15258293573; E-mail:15258293573@163.com
U 663.1
A
1006-7167(2016)09-0067-06
