MEMS-IMU/GPS/GPRS组合导航方案设计与实现
2016-12-05
一、引言
微机电系统(Microelectro Mechanical System,MEMS)惯性器件具有尺寸小、重量轻、成本低、功耗低等特点,是实现低成本导航的主要发展方向[1,2]。但相对于传统惯性导航系统,MEMS-IMU 的精度和稳定性还比较低,导航误差随时间快速增长。另一种得到广泛使用的导航设备是GPS,GPS的定位误差不随时间增长,但信号易受外界条件干扰且数据输出率比较低。
基于MEMS 技术的IMU 和GPS 构成的组合导航系统,不仅结合了GPS 的定位精度高和误差无积累的特点,还结合了惯性导航的自主性和实时性的优点,而且使导航系统的成本下降,可靠性增加,精度得到提高[3]。
对于低成本的MEMS-IMU在性能和精度上仍存在缺点,如数据输出中存在野值现象和较大的常值漂移,严重地影响了系统的正常工作和精度,因此对MEMS-IMU输出的数据应进行预处理[4]。
GPS单点定位也叫绝对定位,就是采用一台接受机进行定位的模式,它所确定的是接受机天线在WGS-84世界大地坐标系统中的绝对位置。外业观测的组织和实施较为方便,数据处理较为简单。其缺点是定位精度较低,可通过差分技术提高定位精度。
通用分组无线业务(GPRS , General Packet Radio Service)是在现有GSM 网络基础上叠加的一个专为高速数据通信而设计的新的网络,其充分利用了现有移动通信网的设备,通过在GSM 网络上增加一些硬件设备和软件升级,形成一个新的网络逻辑实体[5]。按数据量计费,可以作为GPS/IMU数据传输的手段。
本文针对GPS和MEMS-IMU系统各自存在的缺点,基于GPRS技术提出了一个组合导航方案,分别对GPS和IMU数据进行实时接收。实验表明,组合系统工作正常并且达到了一定的精度,适用于低精度和短时间导航应用场合。

二、系统结构与方案
低成本MEMS-IMU/GPS/GPRS组合导航系统结构如图1所示,主要包括数据获取模块、数据集成发送模块和数据融合处理模块[6,7,8,9]。
IMU模块:采用MP6050,包含3轴陀螺仪、3轴加速仪、3轴电子罗盘以及气压计、温度计以及微处理单元,可用于测量载体的线加速度和角速度。模块内部整合了16位的ADC传感器允许陀螺仪和加速度计的实时采样,提高了测量精度以及实现了数据的实时性。模块更提高了温度计的偏度和灵敏度及稳定性,这样就降低了用户校正的需求。此外,MP6050提升了陀螺仪在低频噪声的表现,减少了粗差出现的概率;还拥有程式控制的低通滤波器,让用户可根据自己的需求进行二次开发。
SIM908模块:SIM908是一款集成GPS导航技术的四频GSM/GPRS模块。硬实物如图2。SIM908每秒输出1次NMEA-0183格式的GPS定位信息。$GPGGA和$GPRMC语句包含了系统所需的主要信息,如纬度、经度、速度、方向、时间等。标称定位精度为2.5m CEP。
根据系统结构和硬件资源,本文所做的工作主要包括以下三个部分:
(1)以SIM908为载体,利用单片机STM32F103作为中央处理器,集成IMU模块,实时接收、提取GPS和IMU数据,之后通过GPRS将数据发送到远程服务器;
(2)建立GPS/IMU数据预处理模型和组合导航模型;
(3)实验验证。
三、GPS/IMU数据提取方法
1、设计GPS数据接收并提取信息的思路
根据6种特殊语句中各不相同的标识符,判断接收到的语句是哪一种语句并且知道该语句当中是否包含我们需要的信息,继而编写函数提取我们需要的信息即可[10]。
2、IMU数据接收设计思路
IMU每次会向外发送两帧数据,一帧是原始数据,包含加速计、陀螺仪、电子罗盘、气压计等读数;一帧则是经过解算后的数据,包含姿态角、速度。而每个数据都被分解成高位和低位,并且每帧数据都有校验和。考虑到IMU数据量较大(5frame/s ),且本实验涉及到无线传输,为了避免“丢包”现象(传输过程中出现数据丢失或者数据失真)的现象,对每帧数据都进行了检验和验证,校验不通过的数据进行丢弃。IMU信息提取流程如图3。
3、GPRS链路搭建方法
在学校办公室中多半使用的是内网,而我们的移动网络GPRS每张卡对应的是一个公网IP。由于外网不能直接访问内网,所以不能直接用于TCP/IP通信[11]。为了解决这个问题,需要建立一个映射规则,让外网访问内网的时候知道这个内网IP唯一的地址。实验中使用了“内网通”软件,把内网的IP地址映射到一个网址中(公网),再与单板机SIM908进行GPRS通信。
四、数据预处理模型
1、GPS差分处理
为检验GPS-OEM板的定位精度,对开发板进行精度测试,将开发板放在一个已知控制点上观测一段时间,以北向为例,其北向误差如图4所示。
由图4可以看出,北向误差相对比较稳定,误差平均值在17.03m左右,最大误差为17.075m,对于导航定位的精度要求来说,GPS单点定位误差还是较大,有必要进行位置差分。位置差分的基本原理是:使用基准站的位置改正数去修正动态用户的位置计算值,以求得比较精确的动态用户的位置坐标。
2、低成本IMU数据预处理
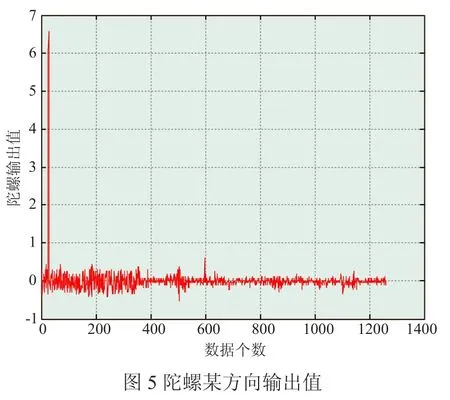
为检验陀螺和加速度计原始数据的可靠性,采集静止状态下IMU输出的数据,以陀螺为例,其输出值如图5所示。可以看出其输出值在零附近上下波动,最大值是6.5,明显属于粗差。必须剔除这些野值,否则会影响导航解算。本文利用文献4中的方法对野值进行辨识和剔除。其原理[4]为:
设y(k)为某输出数据序列,k=1~N,求:


确定合理基点后,利用基点数据的平均值μ和标准差σ来确定后面数据的准确性。即对后面的数据y(j),如果,则认为y(j)为合理值,否则,用前一个数据来代替。
采集静止时IMU输出的数据,对每个陀螺输出的数据进行分析,发现由于环境的影响和IMU敏感程度的不同, 陀螺的常值漂移是有变化的。因此,在捷联惯导解算前,有必要每次启动都估算出陀螺的常值漂移。采取的方法是:在系统开始工作前,采集一定时间的IMU静态数据,并取其平均值作为常值漂移。确定常值漂移后,对以后采集的动态数据进行补偿,然后再进行解算[4]。
五、组合模型
采用松组合模式,状态向量依次为速度误差、姿态误差、位置误差、陀螺漂移误差、加速度漂移误差:

离散化后的状态方程为:

其中,状态转移矩阵为:

其中,Δt—滤波更新周期;
Wk-1—离散后激励白噪声过程,Wk-1的方差阵为:

观测向量设置为GPS所测出的位置和速度与惯性系统所测出的位置和速度之差,观测向量为:

观测方程为:

式中,Vk—观测噪声向量。
观测向量中的GPS与INS位置差是在WGS-84坐标系下计算得出的,速度差是在东北天地理坐标系下得出的。
卡尔曼滤波过程如下:

滤波增益决定了观测量与状态预测之间的权值。

六、实验与结果分析
一方面为了验证本文设计的组合导航方案在静止状态下的可靠性,设计了静态实验,通过接收数据,测试数据通讯和软件接收程序是否可靠和稳定。另一方面为了测试组合导航的定位精度,设计了闭合路线进行车载实验,事后用上文阐述的数据预处理模型和组合导航数据融合模型进行数据处理,测试其定位精度。
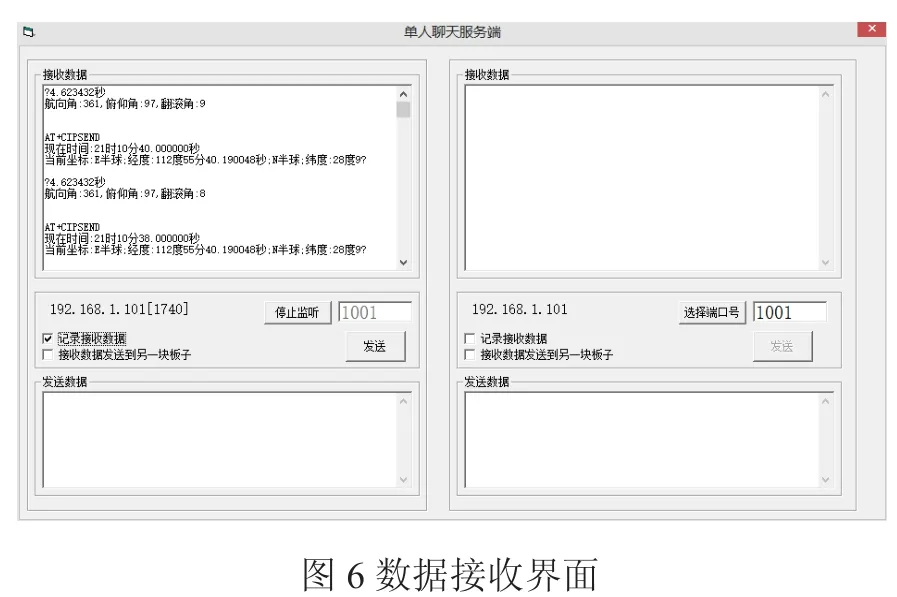
静态实验地点选在长沙市岳麓区中南大学新校区清水路,此路段开阔,并且有数个已知控制点。用文中设计的GPS /IMU /GPRS系统在一个已知点上进行持续观测,用上文设计的VB服务器程序监听端口并将数据保存在TXT文件中。
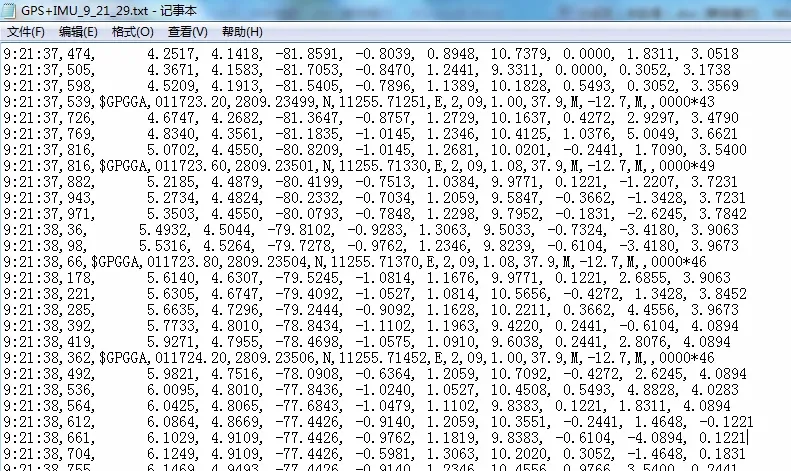
图 6是数据接收界面,能监听端口并接收数据。图7是用本文的GPS/GPRS/IMU遥测系统观测结果(截取部分)。
由静态实验可知,本套系统在野外可以有效地使用,可以把数据发送到远程控制中心,GPRS发送延迟在1s左右,不影响使用。除却GPS定位数据,系统返回的IMU模块测得的姿态角也正常。实验期间SIM908一直正常返回数据,没有出现错误,信号没有丢失,可证明这个系统的可靠性。
动态试验地点选在中南大学新校区内,选择一个闭合路线,将整套设备搭载在汽车上,并将两台RTK搭载在车上以验证系统的位置精度。车载实验前先静止5min,采集一部分静态数据。另外,为了进行GPS差分,另一块SIM908单板机则放在一个已知点上作为基准站进行观测。基站观测数据由串口传输到电脑并存储。远程控制中心的计算机将接收到的数据进行预处理并进行数据融合,得到组合导航轨迹。组合导航轨迹和真实轨迹对比图如图8所示,其东向最大误差为0.7m,北向最大误差为0.5m,高程误差为2.5m,平面定位精度达到分米级。
由车载试验可以看出,系统工作正常,组合导航轨迹与真实轨迹吻合,验证了低成本GPS/IMU松组合结构的可靠性和精度。
七、结语
本文介绍了一种MEMS–IMU/GPS/ GPRS组合导航方案,以低成本IMU模块和SIM908模块为载体,以GPRS为通讯平台,实现了一个精度可靠、成本低、质量轻、通信费用低的导航定位与控制系统,并且具备定位和姿态数据,具有很大的应用潜能。