基于状态空间的PWM逆变器数字PI双环控制技术研究①
2016-12-05段建民
谢 维 段建民
(*北京工业大学北京市交通工程重点实验室 北京 100124)(**北京电子科技职业学院 北京 100176)
基于状态空间的PWM逆变器数字PI双环控制技术研究①
谢 维②***段建民*
(*北京工业大学北京市交通工程重点实验室 北京 100124)(**北京电子科技职业学院 北京 100176)
主要研究了数字控制的实际应用情况以及脉宽调制(PWM)正弦波逆变器的特点,包括电流内环电压外环的双闭环控制。在建立逆变器控制系统状态空间模型的基础上,详细分析了外环为输出电压,内环为电感电流加负载电流前馈控制对应的控制策略的稳定性和动态响应。先对控制系统直接离散化,再利用极点配置的方法进行系统参数设计。从响应速度、外特性、稳定性方面进行了具体分析,结果说明在离散域里双环控制逆变器具有较好的动态响应速度和输出外特性。最后通过实验验证和仿真波形分析,证明这种双环控制技术能满足各项性能指标要求。
PWM逆变器, 状态观测器, 扰动观测器, 双环控制, 极点配置, 数字控制
0 引 言
逆变器作为光伏、风电系统的核心部分,要求它能够输出高质量的电压波形,尤其是在非线性负载情况下仍能够得到接近正弦的输出波形,因此各种各样的逆变器波形控制技术得以发展。其中,双环控制技术以其自身的优点得到越来越广泛的应用。瞬时值反馈控制技术是根据当前误差对逆变器输出波形进行有效的实时控制,如果控制器设计合理,则既可以保证系统具有较好的稳态性能,同时可以保证系统具有较快的响应速度。本文主要研究内容是脉宽调制(pulse width modulation, PWM)逆变电源电流内环电压外环的双环控制技术,对逆变器双环控制进行了理论分析,并结合仿真和实验对其控制性能进行了深入的研究[1,2]。
本文重点研究了逆变器电源数字双环控制技术,讨论了电流内环采用比例积分(PI)调节器、电压外环为比例积分微分(PID)调节器双环控制方式,采用极点配置的方法设计双环控制器参数。在数字控制中,为了克服数字处理器采样、计算延时造成的最大占空比受限问题,引入了状态观测器和扰动观测器,并对其进行了设计。状态观测器输出受多种因素影响,为减小预测误差加入了重复补偿,仿真结果表明此种双环控制方式能够达到较好的动、静态特性,特别是其非线性负载带载能力较强,仿真分析和实验结果均证明带重复补偿的状态观测器能较好地预测系统状态[3,4]。本研究基于理论分析和计算,在一台样机上进行了电流内环电压外环的双环数字控制逆变器实验,实验结果与理论分析相符。
1 正弦PWM单相全桥逆变器的数学模型
本节利用状态空间平均思想,推导了连续域、离散域PWM逆变电源状态空间平均线性模型,给出了固定负载模型和负载扰动输入模型z域传递函数表达式、离散差分方程表达式,同时分析介绍了双环控制技术,为后续各节的分析设计提供理论依据。
为便于控制器的设计,首先必须建立单相电压型PWM逆变器合适的一个数学模型,其等效电路如图1所示。图中滤波电感L与滤波电容C构成低通滤波器,r为考虑滤波电感L的等效串联电阻、死区效应、开关管导通压降、线路电阻等逆变器中各种阻尼因素的综合等效电阻。E为直流母线电压,vi为逆变桥输出电压,vc为逆变器输出电压,iL为流过滤波电感的电流。io代表负载电流。单相逆变桥、LC滤波器和负载被认为是控制对象,直流电压源E通过逆变器向负载提供交流电能。功率开关管在每个开关周期内开通与关断一次。可以采用单极倍频技术,其好处是在开关频率不变的前提下,逆变桥输出电压的频率加倍,从而减小输出滤波器的体积,简化设计,降低成本。电压vi可取三个值:+E, 0 或-E,因此vi是幅值为+E或-E的电压脉冲序列。电流io代表负载电流,它可以被看作是系统的一个外部扰动。数字控制器用于控制逆变器功率开关管的动作,以使输出电压在每个采样时刻精确跟踪正弦参考值[5]。
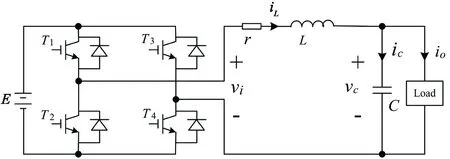
图1 单相全桥逆变器的结构图

全桥电路的vi取值为Ud或-Ud:
(1)
(2)

(3)
将式(2)带入式(3)中可得
(4)

图2 SPWM线性调制原理图
逆变器本质上是一个非线性系统,工程应用中通常采用状态空间平均法。若假设直流母线电压源的幅值恒定,功率开关为理想器件,且逆变器输出的基波频率、LC滤波器的谐振频率与开关频率相比足够低,则逆变桥可以被简化为一个恒定增益的放大器,从而可以采用状态空间平均法来得到逆变器的线性化模型[6]。
单相电压型PWM逆变器的状态模型电路如图3所示,基于基尔霍夫电压定律和电流定律,可以得到逆变器的小信号模型为[7]
(5)
(6)
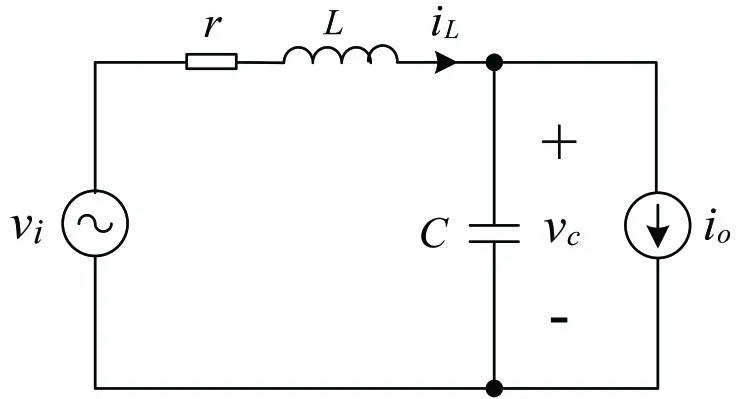
图3 单相电压型PWM逆变器的状态模型电路
逆变器的等效框图如图4所示。从图中可以看出各变量之间的内在联系,图中Z(s)为负载阻抗。
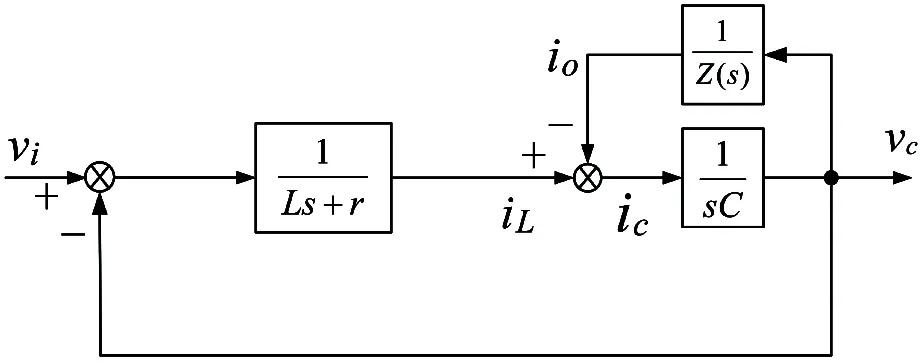
图4 单相电压型PWM逆变器的等效框图
选择电容电压vC和电感电流iL作为状态变量,逆变器的连续时间状态方程(连续模型)为

(7)
y=Cx
(8)
S域输出响应关系式如下:

=G1(s)vi(s)+Wd(s)I0(s)
(9)
再由连续模型推导系统的离散模型。实际系统中采样—保持过程常常采用零阶保持器(ZOH),即假定vi和iO的值在每个采样周期内保持不变。在离散方式是周期采样,采样周期为T,采样频率为fs,同时采用零阶保持器的条件下,即可得出逆变器的离散时间状态方程(离散模型)为[8]
x(k+1)=Gx(k)+Hu(k)
(10)
y(k)=Cx(k)
(11)
由此模型可画出逆变器离散化以后的系统框图如图5所示。

图5 离散化的逆变器方框图
采用逆变器离散化以后的系统,对各状态变量通过仿真进行验证,如图6和图7所示,分析使用了离散化控制的波形,可以看出能够对谐波有很好地抑制作用,总谐波失真(THD)降为1.42%。
但是由于下列因素的影响,所得到的逆变器模型并不精确:
(1) LC滤波器的电感和电容必须在运行点进行测量,但在实际上几乎不可能,只能测量出近似值。此外,通过理论分析估计阻尼电阻r也是非常困难的。
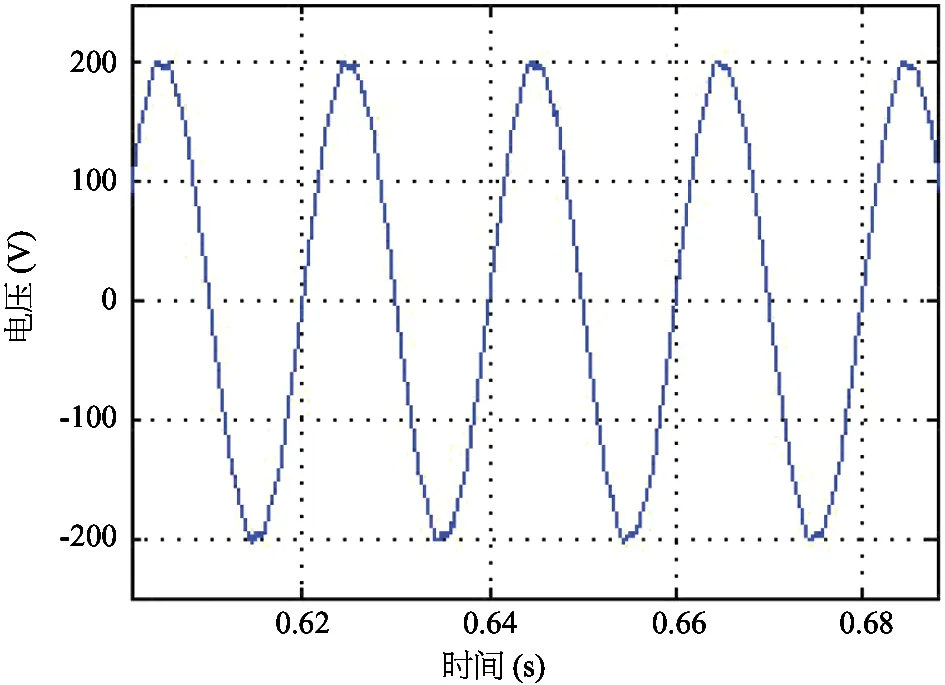
图6 离散化前负载的电压波形
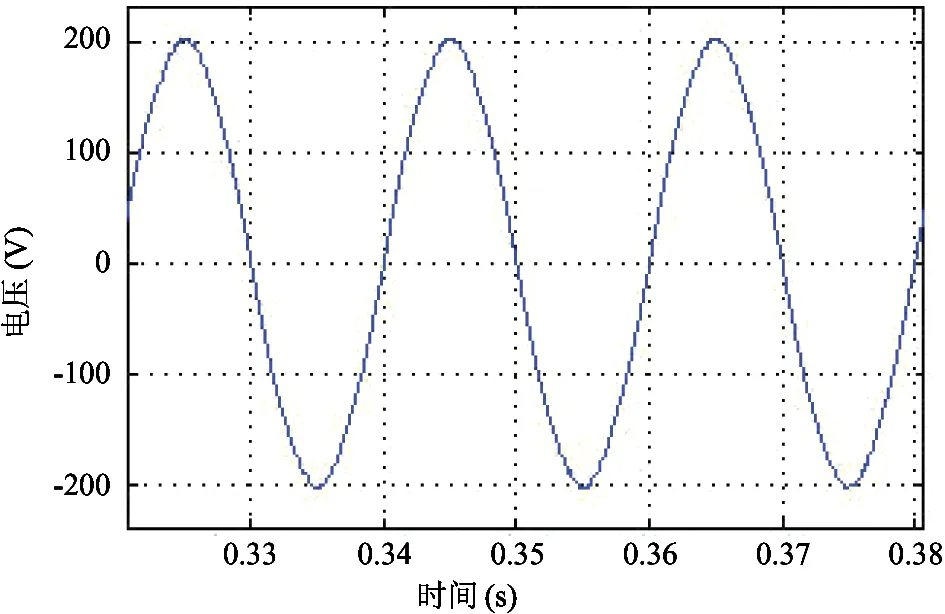
图7 离散化后负载的电压波形
(2) 由于有许多类型的负载可能接到逆变器的输出端,PWM逆变器的数学模型具有某种不确定性,难以得到一个覆盖所有负载的通用数学模型。
(3) 开关器件的特性实际上并不理想。
(4) 直流母线电压并不是一个恒定值[9]。
由于模型的不精确,会对一些控制器的性能产生不利影响。理想情况下,单相电压型PWM逆变器的输出波形应是标准正弦波,但由于死区效应、直流母线电压变化、非线性负载的影响,使逆变器的输出波形发生畸变,下面将对其原因进行分析。
2 电流内环采用PI调节器时的双环控制技术
在逆变器双环控制方案中,电压外环采用比例积分微分(PID)调节器,电流内环采用比例积分(PI)调节器,下文简称双环PID-PI控制方式。其中电流调节器Gi的比例环节用来增加逆变器的阻尼系数,使整个系统工作稳定,并且保证有很强的鲁棒性;电流调节器的积分环节用来减少电流环稳态误差;电压外环采用PID调节器,电压调节器的作用是使得输出电压波形瞬时跟踪给定值。这种电流内环电压外环双环控制的动态响应速度十分快,并且静态误差很小[10]。
以滤波电感电流为内环被控量的电感电流内环电压外环控制并不具备很好的抑制负载扰动性能,因此可将电感电流内环改为电感电流瞬时反馈控制和负载扰动前馈补偿相结合的控制方式[11],从而得到如图8所示的逆变器电感电流内环电压外环PID-PI控制系统框图。

图8 电压外环带负载前馈电感电流内环控制系统框图

表1至表3显示了应用电压外环带负载前馈电感电流内环控制系统框图,电压调节器、电流调节器在实验中的仿真数据对比分析,以调节前后的电压值列表表示。

表1 阻性负载下的输出波形参数比较

表2 非线性负载下的输出波形参数比较

表3 扰动负载下的输出波形参数比较

表4为利用极点配置的方法进行系统参数设计时,从响应速度、稳定误差等方面进行具体分析的结果。
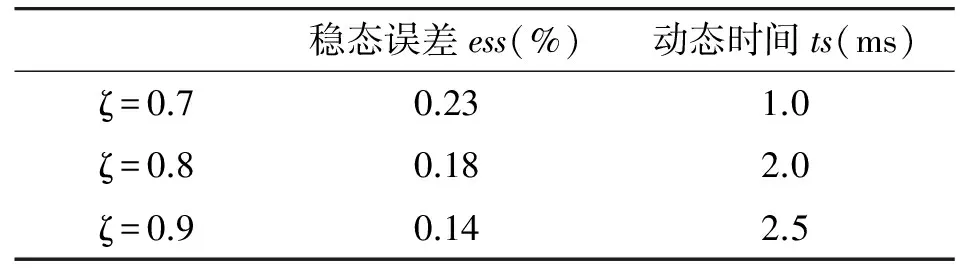
表4 双环数字仿真结果分析
3 实验结果
3.1 稳态实验波形
在不同的负载条件下,即空载、带30A阻性负载、满载时,该逆变器输出电流与电压的运行波形分别如图9、10、11所示。
3.2 动态实验波形
为了考察该逆变器的动态性能,对逆变器进行突加线性负载实验,实验波形如下:
图12为逆变器双环PID-PI控制系统突加26A负载时的响应波形。可以看出,突加25A阻性负载时,电压跌落到284V,瞬间电压跌落与电压峰值的比为8.68%,恢复时间为0.8ms,动态性能较好。可见该系统具有瞬态跌落小和恢复时间快的特点。
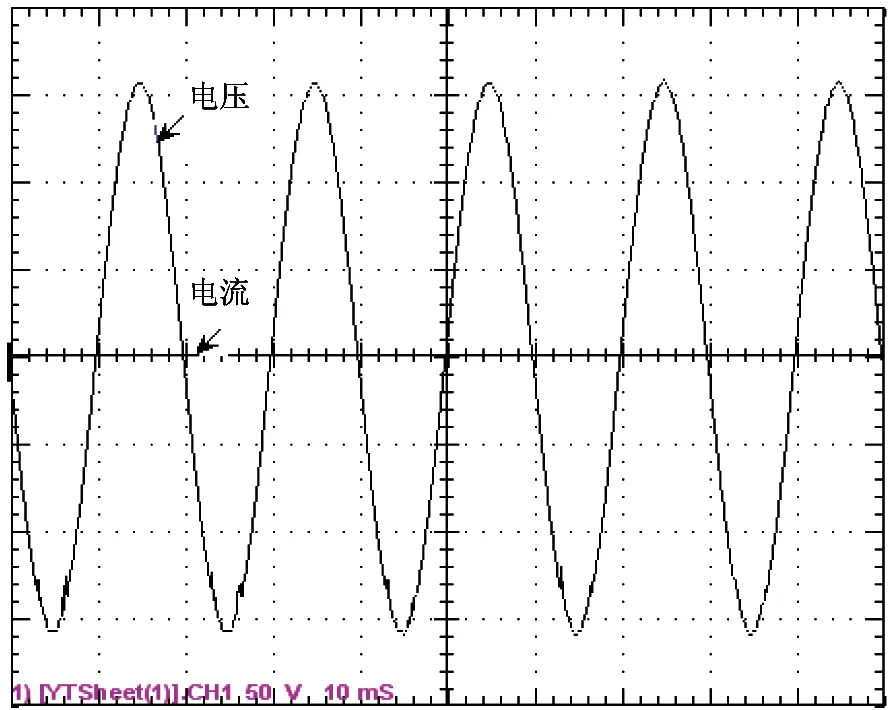
图9 双环PID-PI控制逆变器空载输出电压波形(100V/div,10ms/div)

图10 双环PID-PI控制逆变器带30A阻性负载输出电流电压波形(100V/div,10ms/div)

图11 双环PID-PI控制逆变器带满载(50A)输出电流电压波形(100V/div,10ms/div)

图12 双环PID-PI控制逆变器突加25A负载响应波形(100V/div,10ms/div)
4 结 论
实验结果表明,基于状态空间法的双环控制方法能使PWM逆变器输出高质量的正弦波,对整流性负载具有较好的抑制能力,而且动态调节速度较快,系统拥有较好的动态性能,能有效补偿各种误差影响,各种负载时输出电压稳态误差不超过0.5%,突加阻性负载时电压变化率为8.68%,即使带非线性负载输出电压也能保持较好的正弦度,因而是较为理想的控制方法。
[1] 陈坚. 电力电子学—电力电子变换和控制技术(第3版). 北京:高等教育出版社,2011. 91-109
[2] 徐德鸿. 电力电子系统建模及控制. 北京:机械工业出版社,2010. 187-204
[3] 黄俊,王兆安. 电力电子变流技术(第3版). 北京:机械工业出版社,2011. 71-91
[4] 徐顺刚,许建平,曹太强. 电压电流双闭环反馈逆变器并联控制. 电力自动化设备,2009,(10):103-105
[5] 林渭勋. 现代电力电子技术. 北京:机械工业出版社,2006. 167-199
[6] 刘飞,查晓明,段善旭. 三相并网逆变器LCL滤波器的参数设计与研究. 电工技术学报,2010,25(3):110-116
[7] Wyk J D V. Power electronics technology at the dawn of a new century: Past achievements and future expectations. In: Proceedings of the 3rd International Power Electronics and Motion Control Conference, Beijing, China, 2000. 9-20
[8] 张轩,刘进军. 微网孤岛运行时基于逆变器的新型功率控制. 电源学报,2011,(1):38-40
[9] Bose B K. Recent advances in power electronics.IEEETransactionsonPowerElectronics, 1992, 7(1):2-15
[10] 肖华锋,杨晨,谢少军. 基于改进型全桥电路的非隔离光伏并网逆变器. 中国电机工程学报,2011, (3):41-44
[11] Erickson R W. Fundamentals of power electronics, 2nd Edition. New York: Chapman & Hall, Ltd., 2001. 331-376
[12] 马志文,殷振环. 大功率二电平逆变器多模式SVPWM算法研究. 微电机,2010,(4):17-20
Research on the state space based digital PI dual loop control for PWM inverters
Xie Wei***, Duan Jianmin*
(*Beijing Key Laboratory of Traffic Engineering, Beijing University of Technology, Beijing 100124)(**Beijing Polytechnic, Beijing 100176)
The practical application of digital control, including dual loop digital control technique with instantaneous voltage and current feedback, as well as the feature of sinusoidal wave pulse width modulation (PWM) inverters, were mainly studied. Based on the establishment of state space model for the inverter control system, a dual loop digital control strategy (the inner loop is for inductor current and the out loop is for output voltage) was proposed with output feed forward. After direct discretization, the control system’s parameters were calculated by a pole assignment method. The simulation waveforms under various conditions were presented. Both the simulations and the experiments showed that the proposed technique was simple and feasible, which can meet all the performance requirements of the inverter power source perfectly.
PWM inverter, state observer, disturbance observer, dual-loop control, pole-assignment, digital control
10.3772/j.issn.1002-0470.2016.03.008
①北京市教委科技计划面上项目(KM201510858004)和北京电子科技职业学院重点课题(YZK2016035)资助项目。
2015-11-06)
②男,1971年生,博士,教授;研究方向:智能控制,信息处理,新能源发电等;联系人,E-mail: xiew_bj@hotmail.com(
