水下短距离高速激光通信系统的研究与实现
2016-12-02马春波王永辉王德令
马春波,王永辉,敖 珺,王德令
(桂林电子科技大学 信息与通信学院,广西 桂林541004)
水下短距离高速激光通信系统的研究与实现
马春波,王永辉,敖 珺,王德令
(桂林电子科技大学 信息与通信学院,广西 桂林541004)
针对水下短距离(≤50m)无线光通信的应用需求,提出了一种实用的调制驱动电路,对电路结构进行了详细说明。设计开发了一套基于D SP和FPG A的激光通信系统,编写了通信协议,并对整个通信系统进行了测试,验证了其可行性。
水下;短距离;激光通信;高速率
0 引言
随着人类水下活动的增多,相关设备和系统急需进一步研发和完善,如船舶、水下传感网络(UWSNs)、远程遥控车辆(ROVs)和水下自动化设备(AUVs)等[1]。目前,水下无人探测技术相对成熟,人们开始研究多设备协同操作来执行任务[2]。海洋探测中,需要在不同的水下终端设备间实时传输大量数据。因此,构建支持高速点对点通信的水下无线光通信网络是目前自由空间光通信发展的一个重要分支。
研究表明,海水对480~540nm波段的蓝绿光具有“窗口效应”,即海水对其损耗最小。利用这种特性,可以将激光通信应用于水下。在水下环境中,探测设备的空间和携带的能源都十分有限,激光二极管(LD)不仅能有效减小通信端机体积,降低设备功耗,而且相比LED,它还具有响应速度快、调制性能好、传播距离远、光强和效率高等特点,因此被应用于水下短距离的激光通信中。高速率数据传输是水下蓝绿激光通信追求的目标之一,现有的LD驱动电路的调制带宽比较有限[3],严重影响了系统的通信速率。因此,本文提出一种实用的高速调制驱动电路,并设计一套简单可行的激光通信系统。
1激光通信系统总体设计
本文设计的激光通信系统整体框图如图1所示,发送端主要包括DSP模块、FPGA模块和LD驱动模块。接收端主要包括光电检测模块、信号调理模块、FPGA模块和DSP模块。上位机通过串口将信息传入DSP内,DSP进行信息处理和编码后,将信息通过外部存储器接口(EMIF)[4]通信传输至FPGA,FPGA将信息成帧并调制发送。LD驱动电路驱动LD发光,信息通过激光载体发出。在接收端,光电检测电路将光信号转换成电信号,FPGA进行硬判决并解调提取信息,将信息通过EMIF通信传输给DSP,DSP进行信息解码并传输给上位机。
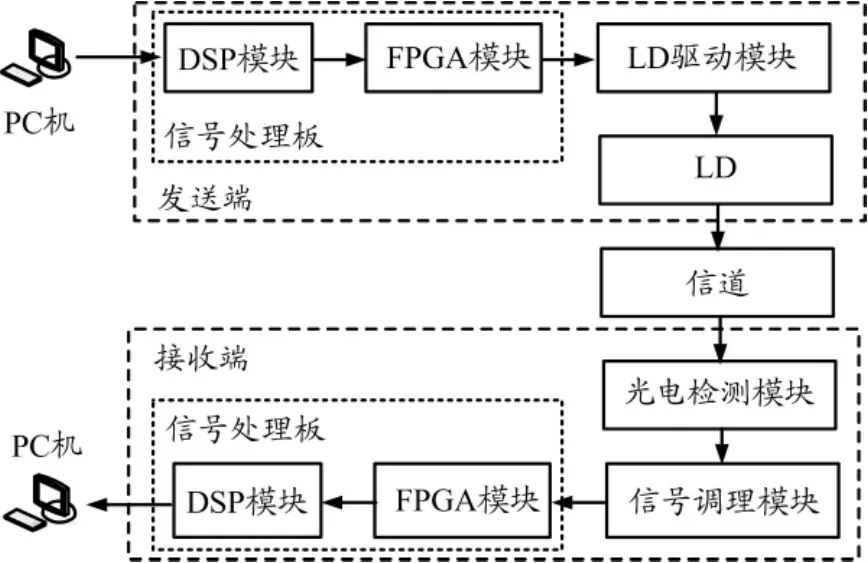
图1 激光通信系统整体框图
2 硬件电路设计
2.1 信号处理板的设计
DSP处理速度快,在进行复杂的信道编解码运算时有明显优势,而且编程简单。FPGA能对数据进行并行处理,调制频率高。因此,实验平台采用DSP+FPGA构架,其中DSP的型号为TMS320C6713BPYP200,FPGA的型号为EP2C20Q240C8。在整个系统中,两者可以相互配合完成信息的处理和传输。信号处理板的整体框图如图2所示。
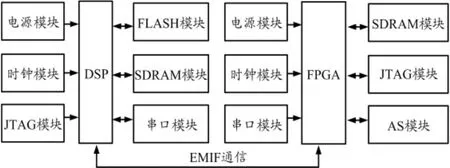
图2 信号处理板整体框图
EMIF是DSP和外部存储器进行通信的接口, EMIF通信具有速度和位宽上的优势[4]。通过EMIF接口,DSP可以访问多种外部存储器,如SDRAM、FLASH和FPGA。
TMS320C6713BPYP200的寻址位宽最高可达32位[5]。DSP读取一个数据由Setup、Strobe、Hold这3个阶段组成,读取数据过程的最小单位是周期。如果EMIF的工作时钟为100MHz,则一个周期是10ns,读取一次数据至少需要30ns。这是因为CPU访问EMIF时,两次访问间的时间间隔会带来延时,所以数据从DSP传输到FPGA的整个过程所需的时间要稍大于30ns,通信速度还是非常可观的[6]。
FPGA在读写数据时的时序如下:FPGA读取数据(即DSP写数据)时,若检测到FPGA中AWE为下降沿且CE为低,则读数据总线即可;FPGA写入数据时(即DSP读数据),若检测到FPGA中AOE和CE均为低,则写数据总线即可。其余时间需将数据总线置为高阻态。
2.2 LD驱动电路的设计
LD谐振驱动电路的整体框图如图3所示。输入信号经过缓存(buffer)后,偏置电路将其与直流信号叠加,驱动LD发射出激光信号。
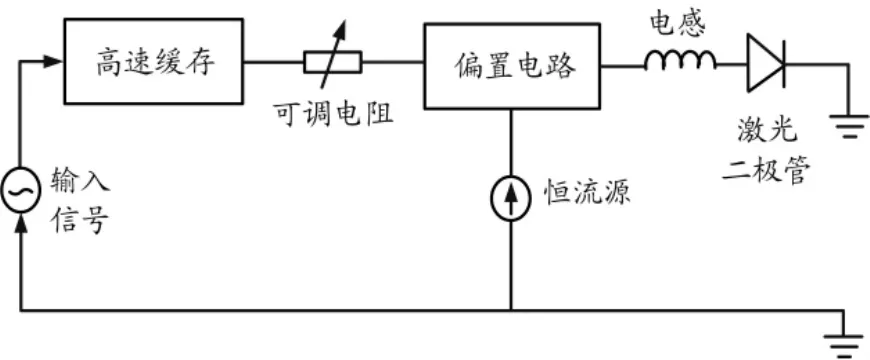
图3 LD驱动电路整体框图
偏置电路是一种无源部件,它的作用是将高频信号和直流(DC)信号耦合到一起或将两者的合成信号分离开。最简单的偏置电路是由一个电感和一个电容组成的,理想情况下,电感相当于一个低通滤波器,直流信号可以通过,高频信号不能通过;电容相当于一个高通滤波器,高频信号可以通过,直流信号不能通过。在实际情况中,电感具有自谐振,严重影响了电路的性能。为了提高带宽,本文设计了谐振电路,电路结构图如图4所示。
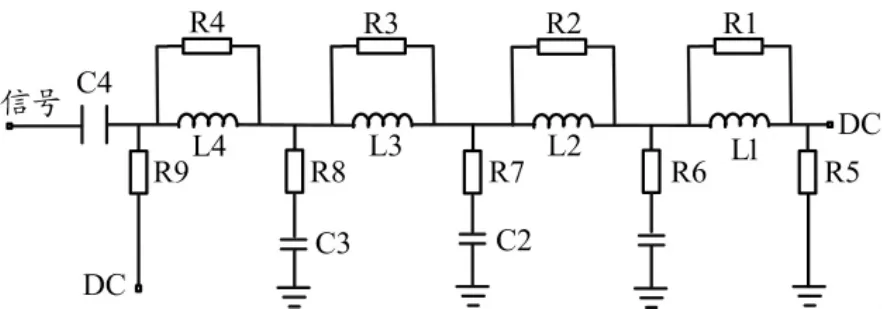
图4 宽带偏置电路的设计
图4中,输入信号经过C4后与直流信号叠加,信号的输入阻抗为:

其中,L和R分别为电路中的总感抗和总阻抗。电路的谐振频率为:

目前,宽带通信的偏置电路设计还没有明确的准则可以参考,只能从最基本的电路开始研究。为使电路的稳定工作频率达到60MHz并满足LD的驱动电流要求,本文根据式(1)和式(2)来设定电感、电容和电阻的值。实际电路中,由于寄生效应、自谐振和器件本身差异,要根据情况调整各元器件的值。
我们对驱动电路进行了测试,输入信号和得到的输出信号如图5所示。输入信号是频率为60MHz的正弦波,当输入为高电平时,LD发光,代表二进制信息“1”;当输入为低电平时,LD不发光,代表二进制信息“0”,利用光的通断即可传递信息[7]。从图5可以看出,驱动电路的输出信号不仅能很好地表现输入信号,没有产生畸变和失真,而且其输出电流也可以使LD正常工作。因此,本驱动电路完全符合激光通信系统的性能要求。
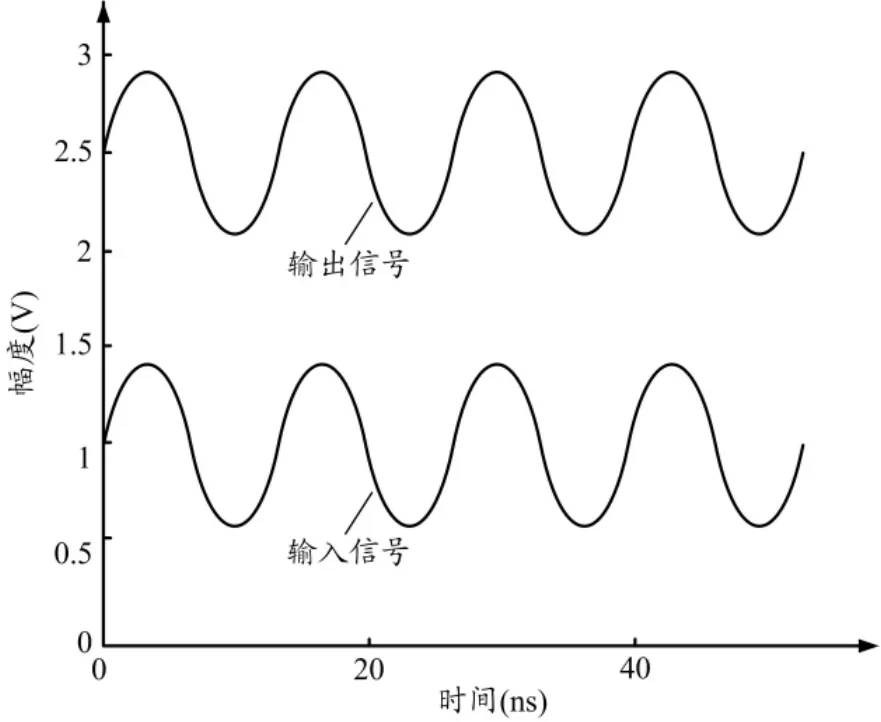
图5 LD驱动电路测试结果
2.3 光电检测模块设计
光电探测器采用Firstsensor公司生产的高性能单点APD,整个探测电路包括光信号输入部分、APD电路、流压转换电路、放大整形电路和信号输出电路。光电转换模块的整体框图如图6所示。
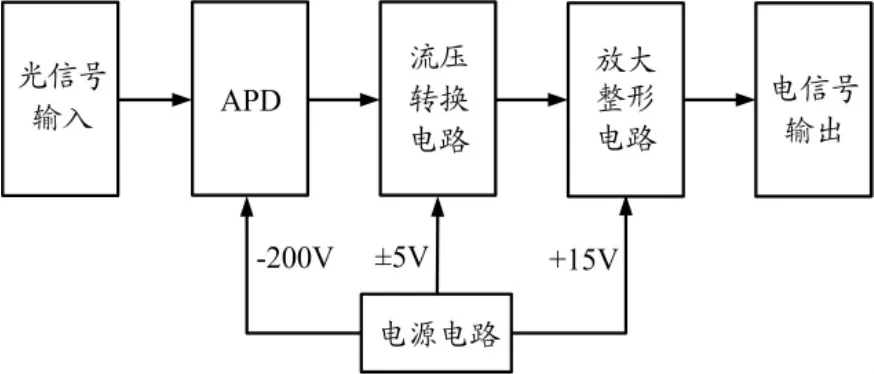
图6 光电检测模块整体框图
在电路放大部分,选择高性能放大芯片THS3091作为主放大芯片,它的压摆率达7300V/μs。放大后的信号进入高速比较器LT3501进行滞回比较整形,整形后由比较器输出3V左右的方波。
3 软件设计与数据帧结构
整个系统的软件分为DSP部分和FPGA部分。在发送端,DSP主要负责从上位机接收数据和信息编码,FPGA负责信息成帧和调制发送。在接收端,FPGA主要负责信息接收解调,DSP负责信息解码并将解码后的信息发送回上位机。发送端和接收端的软件流程图分别如图7和图8所示。
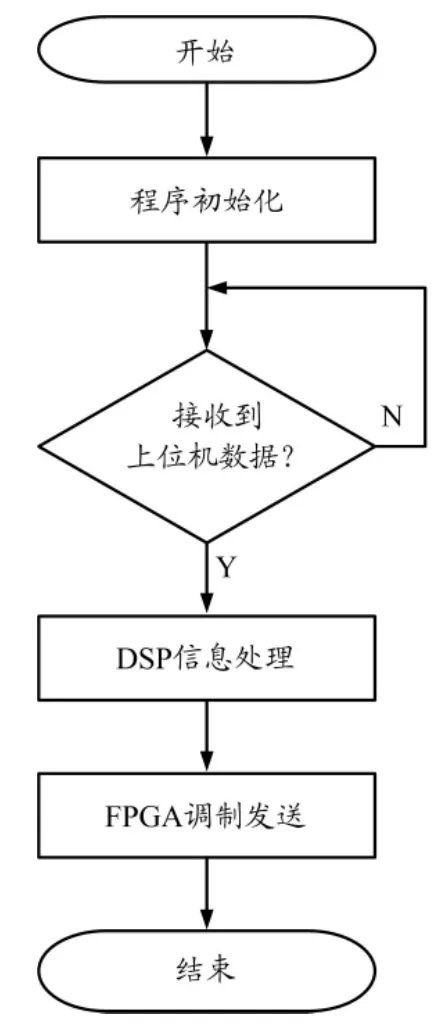
图7 发送端软件流程图
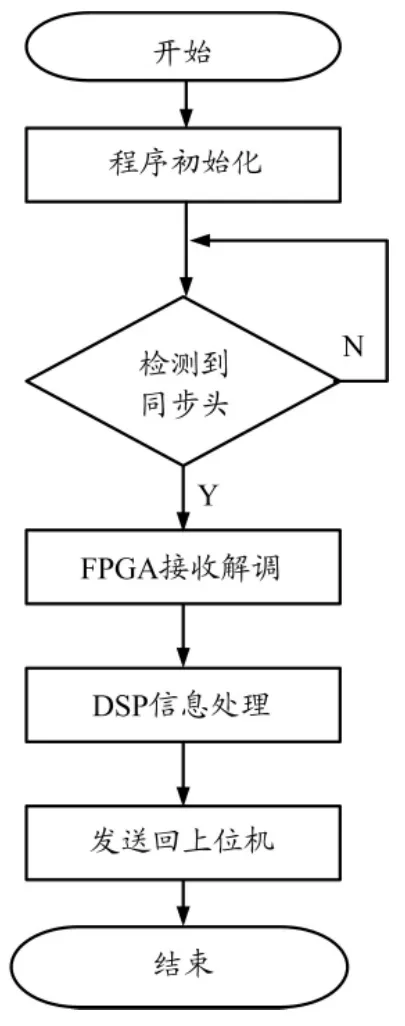
图8 接收端软件流程图
本系统采用OOK调制,它具有带宽和功率利用率较高的优点。OOK调制后的信息是随机无规律的。在发送端使用“01111110”作为同步头,为了保证数据中不会出现同步头信息,需要对发送的信息进行位填充:遇到5个“1”,插入1个“0”,即“逢五插一”,保证了同步头在数据流中的唯一性。发送端信息的具体帧格式为:01111110(同步头)+32bit帧信息(帧长度、序列号等)+数据信息+CRC校验,其帧结构示意图如图9所示。
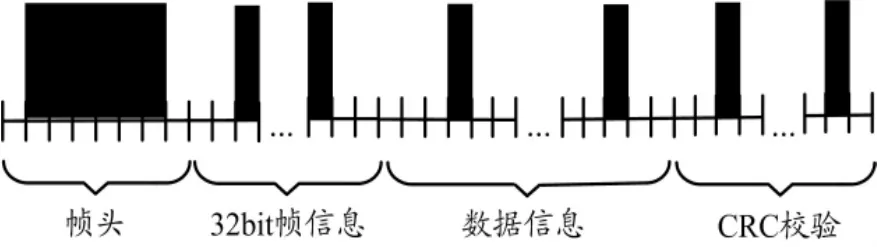
图9 数据帧结构示意图
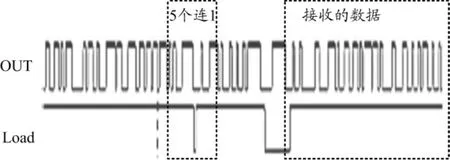
图10 接收端FPGA仿真图
本文采用Signal TapⅡ软件仿真了接收端FPGA接收到的数据,如图10所示。FPGA接收到的信息中存在5个连“1”的位置,便于剔除后面的一个“0”。
4 系统测试分析
我们按照图1在实验室搭建了激光通信系统的整体模型,对系统进行了测试。在发送端上位机使用自己编写的上位机软件,该软件可以设定发送数据的时间间隔和每次发送的字节数。接收端使用常用的串口助手。信息以文本形式通过上位机传输到信号处理板,经过编码调制后被加载到激光上发射。在接收端,接收到的信号经过光电转换、同步头段检测和解调译码后,由串口将得到的解调译码结果输出给接收端的PC机,并在PC机的串口调试助手中显示出来。我们比较了发送端的发送信息和接收端接收到的信息,误码率计算结果表明本系统的性能完全满足通信需要。
5 结束语
本文针对水下短距离高速通信的需求,研究并设计了一套实用的高速激光通信系统。本系统具有以下优点:①端机体积小、重量轻、功耗低,有利于在水下环境中长时间工作;②频带宽、信息容量大,能进行实时大容量数据传输;③保密性好、抗电磁干扰,设备间干扰少适合用于民用通信和军事领域[9];④易搭建、成本低、性能稳定,为以后激光通信设备的大面积推广提供了前提。另外,我们还设计了一种高速调制驱动电路,解决了现有LD驱动电路带宽受限的问题。本文设计的高速激光通信系统还有很多需要改进的地方,如通信协议的优化(加入反馈机制,等停协议)和电路参数的调整,今后可进一步研究将MIMO技术运用于系统中,提高系统的通信性能。
[1]CHANDRASEKHAR V,SEAH W K G,CHOO Y S,et al.Localization in underwater sensor networks:survey and challenges[C].New York:Proceedings of the 1st ACM international workshop on Underwater networks, 2006.
[2]MINH H L,O'BRIEN D,FAULKNER G,et al.High-speed visible light communications using multiple-resonant equalization[J].Photonics Technology Letters,IEEE,2008,20(14):1243-1245.
[3]NOSHAD M,BRANDT-PEARCE M.Application of expurgated PPM to indoor visible light communications-Part I:Single-user systems[J].Journal of Lightwave Technology,2014,32(5):875-882.
[4]陈美燕,王丹.基于Verilog-HDL的信号处理板卡中双向端口的设计[J].中国集成电路,2008,17(6):71-75.
[5]任勇屹,张祺,韦忠正.一种FPGA和T MS320DM642的通信方案[J].计算机应用与软件,2013,30(7):298-300.
[6]德州仪器.TMS320C6000系列DSP的CPU与外设[M].北京:清华大学出版社,2007.
[7]刘洋,章国安.可见光通信调制方式及其性能研究[J].激光与光电子学进展,2014,51(9):61-67.
[8]李晓峰.星地激光通信链路原理与技术[M].北京:国防工业出版社, 2007.
Research and implementation of underwater short-distance high-speed laser communication system
MA Chun-bo,WANG Yong-hui,AO Jun,WANG De-ling
(School of Information and Communication,Guilin University of Electronic Technology,Guilin Guangxi 541004,China)
The paper intends for the application requirements of short-distance(≤50m)wireless optical communication system,proposes a modulation driving circuit and give the details of the circuit structure.It designs and develops a laser communication system based on DSP and FPGA and write the communication protocol,makes the tests to validate circuit is feasible.
underwater,short-distance,laser communication,high-speed
TN929.3
A
1002-5561(2016)04-0052-04
10.13921/j.cnki.issn1002-5561.2016.04.017
2015-12-15。
国家自然科学基金(61167006)资助;“认知无线电与信息处理”省部共建教育部重点实验室主任基金(CRKL150106)资助。
马春波(1975-),教授,博士后,主要研究方向为光通信和信息安全。
敖珺,junjunao1@263.net。