双馈调速在泵站电机上的应用
2016-12-01李瑾
李 瑾
(南昌工程学院 机械与电气工程学院,南昌 330099)
双馈调速在泵站电机上的应用
李 瑾
(南昌工程学院 机械与电气工程学院,南昌 330099)
目前不少泵站仍使用不调速的交流电机,白白浪费了不少电能,而使用普通的变频调速,需选用高压变频器,调速较困难。针对上述现状,给出了一个主电路为交-交变频器,采用定子磁场定向的矢量控制双馈调速系统,给出了系统控制框图和控制部分主程序流程图,且用MatLab/Simulink软件对整个系统建立了仿真模型,并给出了仿真波形。仿真试验结果表明:该调速系统定子电流谐波小,控制精度高,动态响应快,工作性能稳定;而且当所需调速范围不大时,可大大减小变频器容量从而显著降低成本,因此在泵站电机调速改造中具有广阔的应用前景。
双馈调速;调频电机;矢量控制;MatLab/Simulink;仿真试验
1 研究背景
我国是一个农业大国,建在江河湖泊上的电力排灌站数量众多,在拖动风机泵类负载的电动机中,大功率电动机在数量上占20%,但在容量上却占80%以上,目前仍有不少泵站还在使用着不调速的交流电机,大量的电能被白白浪费掉了[1]。若采用普通的变频调速,将变频器接于定子侧,不但要求变频容量需接近或超过电机全功率,而且由于泵站电机定子采用高压供电,需选用高压变频器,采用恒压频比控制时,电压还可能超过电网电压,调速很难实现。
本文提出了一种绕线电机双馈变频调速方案,调速系统中电机定子接工频电网,转子侧接变频器。由于变频器只处理转差功率,而泵站使用的电机一般为多极低速电机,要求的调速范围不大(多数<±10%同步转速),因此可大大减小变频器容量,显著降低成本;双馈电机既具有交流异步电动机,又具有交流同步电机特性,其定子侧无功功率可按需调节,使电机实现高功率因数高效节能运行[2]。由于双馈调速为转子侧调速,一旦变频器出现故障,转子短路后电机还可在额定转速下可靠运行,使生产保持连续性和安全性。将该双馈调速方案用于泵站电机调速,能实现电机从低同步到超同步运行范围内的无级平滑调速,既能实现降速节能灌溉(对应电机“低同步状态”),也能实现提速排渍(对应电机“超同步状态”),因此该方案是我国泵站电机调速改造的最佳选择,具有无可比拟的优势和广阔的应用前景[3]。
2 双馈调速系统的原理和结构
双馈调速就是将电能分别馈入绕线电机的定子绕组和转子绕组,其中定子绕组接工频电源,通过改变转子侧所接交流电源电压的频率、幅值和相位,就可以调节异步电动机的转矩、转速和电动机定子侧的无功功率[4]。这种双馈调速的异步电机不但可在低同步转速区运行,而且能在超同步转速区运行,既可工作在电动状态,也可工作在发电状态[5]。
双馈调速系统的结构如图1所示,电机的定子接工频电网,变频器和可调电阻通过开关KM1和KM2分别接电机转子,KM1与KM2相并联。电机起动时KM2闭合,电机转子串电阻起动以减小起动电流;待转速上升到接近额定转速时令KM1闭合接入变频器。
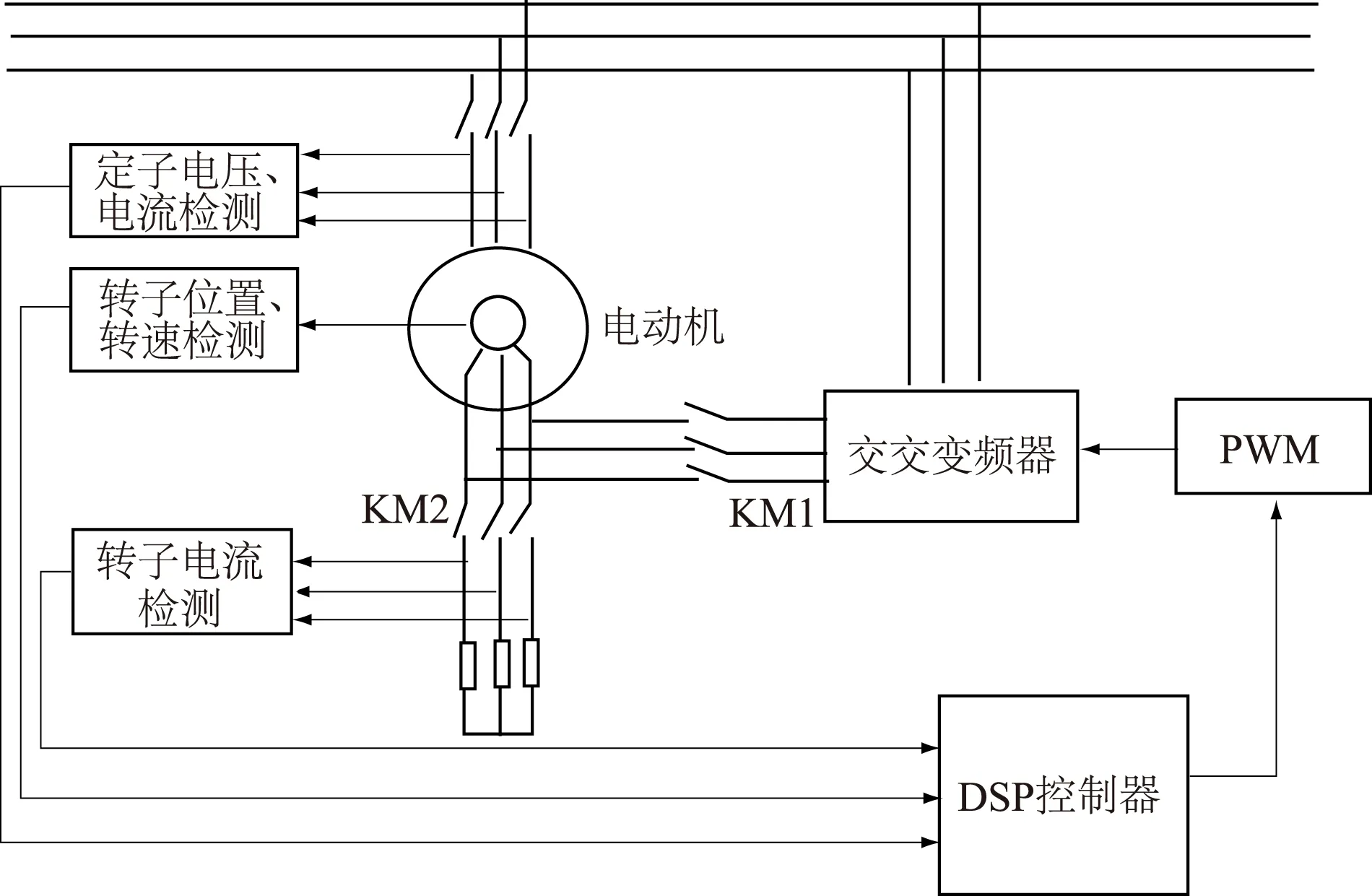
图1 双馈调速系统结构Fig.1 Structure diagram of the double-fed speed regulation system
本调速系统中变频器用来给电机提供一定幅值、频率和相位的励磁电压,以控制电机的转速和功率因数。由于交-交变频器具有能量转换效率高,能量双向流动能实现电机四象限运行的优点,故选用由6个晶闸管智能模块构成的三相桥式交-交变频器,不仅价格低于全控型器件构成的变频器,而且使用晶闸管模块后,线路简单,大大降低了晶闸管触发难度,提高了电路工作的可靠性,且在技术上适应我国泵站工人的维修水平。另外,由于转差频率一般<10 Hz,变频器工作于低频,换流波形好,效率高。
主控制器选用专用于电机控制领域的16位定点DSP芯片TMS320LF2407A,它接受检测电路送来的电机转速、转子电流、转子位置等信号,并在DSP内部对这些信号进行运算和处理,以实现矢量控制功能。另外,6路SPWM(Sinusoidal Pulse Width Modulation) 波形也是由DSP产生来控制交-交变频器中的6个晶闸管模块。
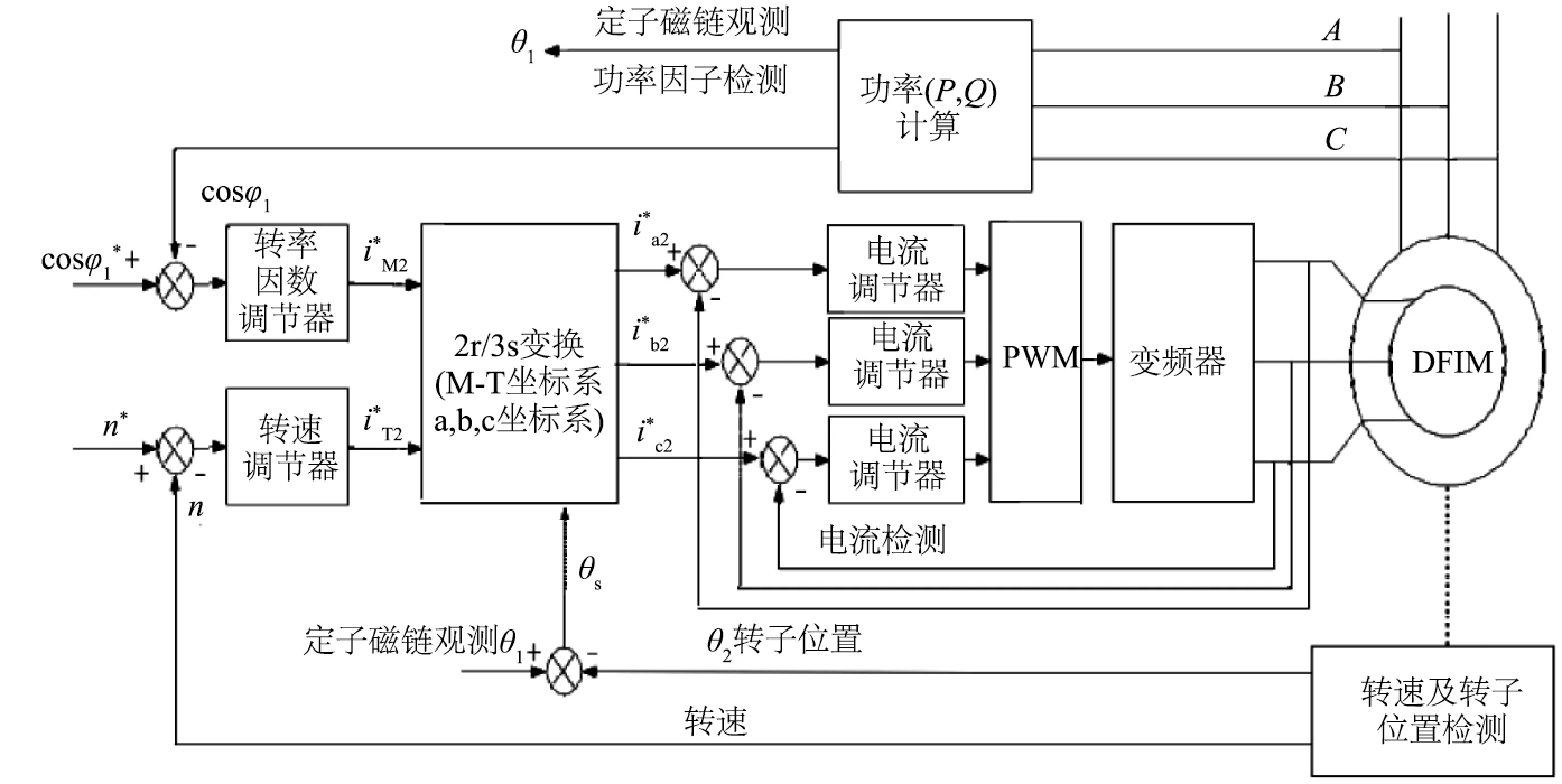
图3 系统控制框图Fig.3 Block diagram of system control
3 矢量控制原理
在双馈调速中主要有“按转子磁场定向”、“按气隙磁场定向”和“按定子磁场定向”3种矢量控制方法。定子磁场定向的矢量控制方法,是将旋转坐标的M轴放在定子磁链Ψ1方向上,此时定子磁通的T轴分量为0。如果保持定子磁通恒定,转矩就跟T轴电流成正比,转矩公式简单,是2个标量之积,而且磁链只有一个分量。因此本文采用基于定子磁场定向的矢量控制方法。以定子磁链Ψ1为定向矢量,在同步旋转的M和T坐标系中建立双馈电机的数学模型如下[6]:
UM1=r1iM1+PψM1-ψT1ω1,
(1)
UT1=r1iT1+PψT1+ψM1ω1,
(2)
UM2=r2iM2+PψM2-
ψT2(ω1-ωr) ,
(3)
UT2=r2iT2+PψT2+
ψM2(ω1-ωr),
(4)
ψM1=L1iM1+LmiM2,
(5)
ψT1=L1iT1+LmiT2,
(6)
ψM2=L2iM2+LmiM1,
(7)
ψT2=L2iT2+LmiT1,
(8)
Tem=np(ψM1iT1-ψT1iM1)。
(9)式中:U,ψ,r和i分别表示电压、磁链、电阻和电流,下标中M和T分别表示沿M轴和T轴方向的分量;Tem为电磁转矩;Lm表示定转子间的互感;ω1为电源角频率;ωr为转子旋转速度对应电角频率;np为极对数;L1,L2分别表示定子和转子绕组的自感;下标1和2分别对应定子和转子侧。
该矢量控制系统的矢量图如图2所示,它由定子侧以ω1旋转的M,T坐标系和转子侧以ωr旋转的d,q坐标系组成(设转子旋转的参考轴与定子A相的基准轴α重合)。
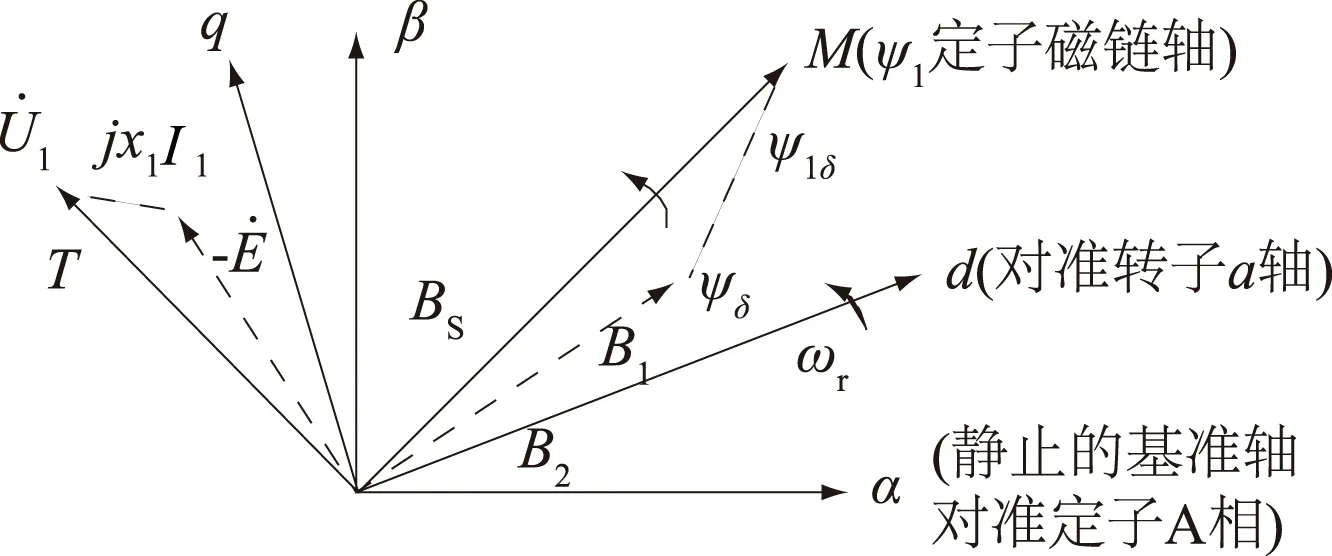
图2 矢量图Fig.2 Vector diagram
由于M轴与Ψ1同向,则ψ1=ψM1,ψT1=0,
由式(5)、式(6)可得:
(10)
(11)
将式(10)代入式(9)可得
Tem=np(ψM1iT1-ψT1iM1)=-npψM1LmiT2/L1。
(12)
所以当定子磁链保持不变时,控制转子电流的T轴分量即可控制转矩从而控制转速。
4 系统控制框图
双馈调速系统控制框图如图3所示。图中功率因数和转速是外环控制,内环为电流环。将功率因数的给定值与反馈值比较后得到的偏差值传送到功
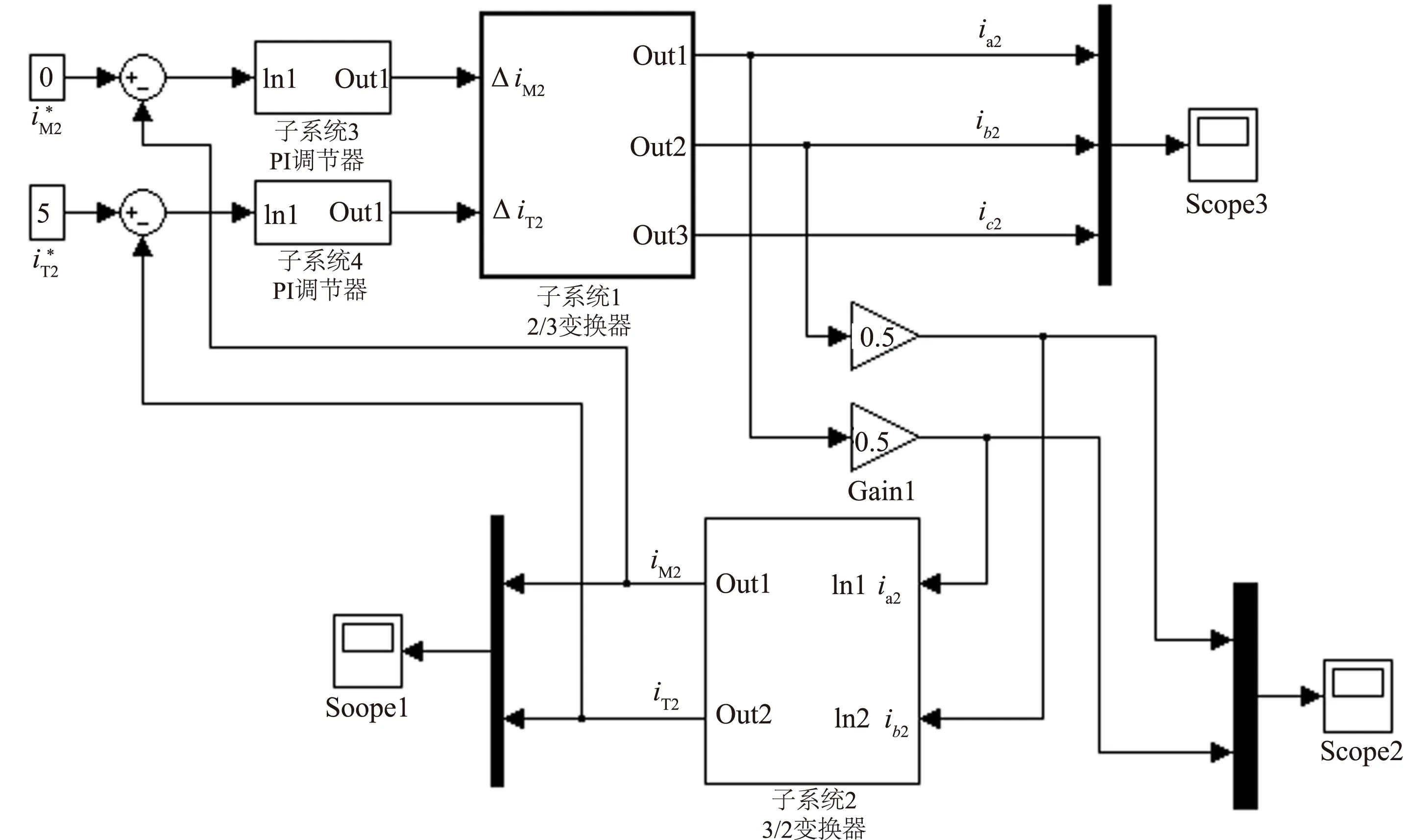
图5 矢量转换仿真总图Fig.5 General chart of vector conversion simulation
率因数调节器,经计算后得到转子电流无功分量的期望值iM2﹡,给定转速与实际转速的差值送到转速调节器,经计算得到转子电流有功分量的期望值iT2﹡,经2r/3s的坐标变换后得到转子三相电流的给定值ia2﹡,ib2﹡和ic2﹡,分别与实际转子电流值比较后送到电流调节器,由电流调节器的输出去触发6个晶闸管模块,从而控制变频器的输出。
5 系统软件设计
控制系统的程序采用TMS320LF2407A的C语言编写,采用模块化设计,主要由初始化程序、主程序(循环等待执行)和中断服务子程序构成。系统上电运行后,首先执行初始化程序,主要完成对数字信号处理器(DSP)相应寄存器的初始化、DSP片内外设的配置、变量赋初值等任务,为其后控制程序正确执行做准备。
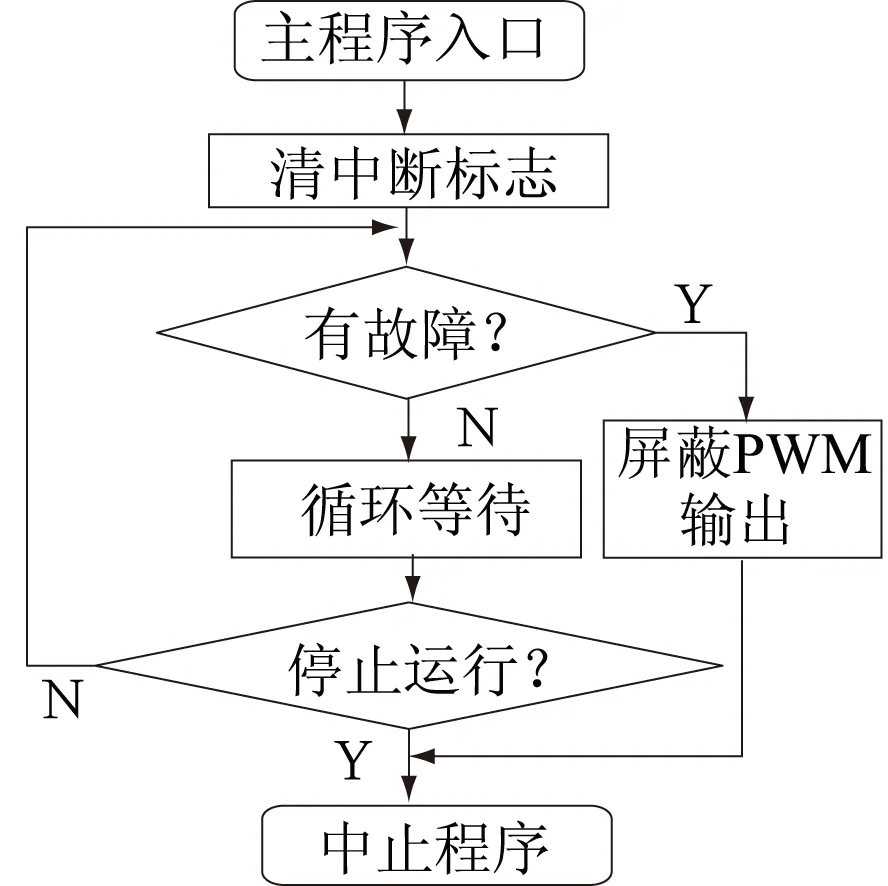
图4 主程序流程Fig.4 Flow chart of main progran
控制系统的主程序流程如图4所示,它是个循环等待中断的过程,完成的功能相对简单。进入主程序后首先将中断关闭,然后进行故障判断,有故障则转到屏蔽PWM输出并中止主程序,没有故障则进入循环中断等待状态。一旦有中断发生,则按照中断信号级别的高低来转入相应的中断服务子程序,执行完中断服务程序之后又返回到主程序。
6 系统仿真模型及仿真结果
本文在Matlab软件仿真环境中采用Simulink界面模块对该双馈调速系统进行了仿真,所用三相绕线电机的主要参数为:额定功率PN=10 kW,额定电压UN=380 V,额定转速nN=1 440 r/min,极对数np=2,cosN=0.81,ηN=82.5%。
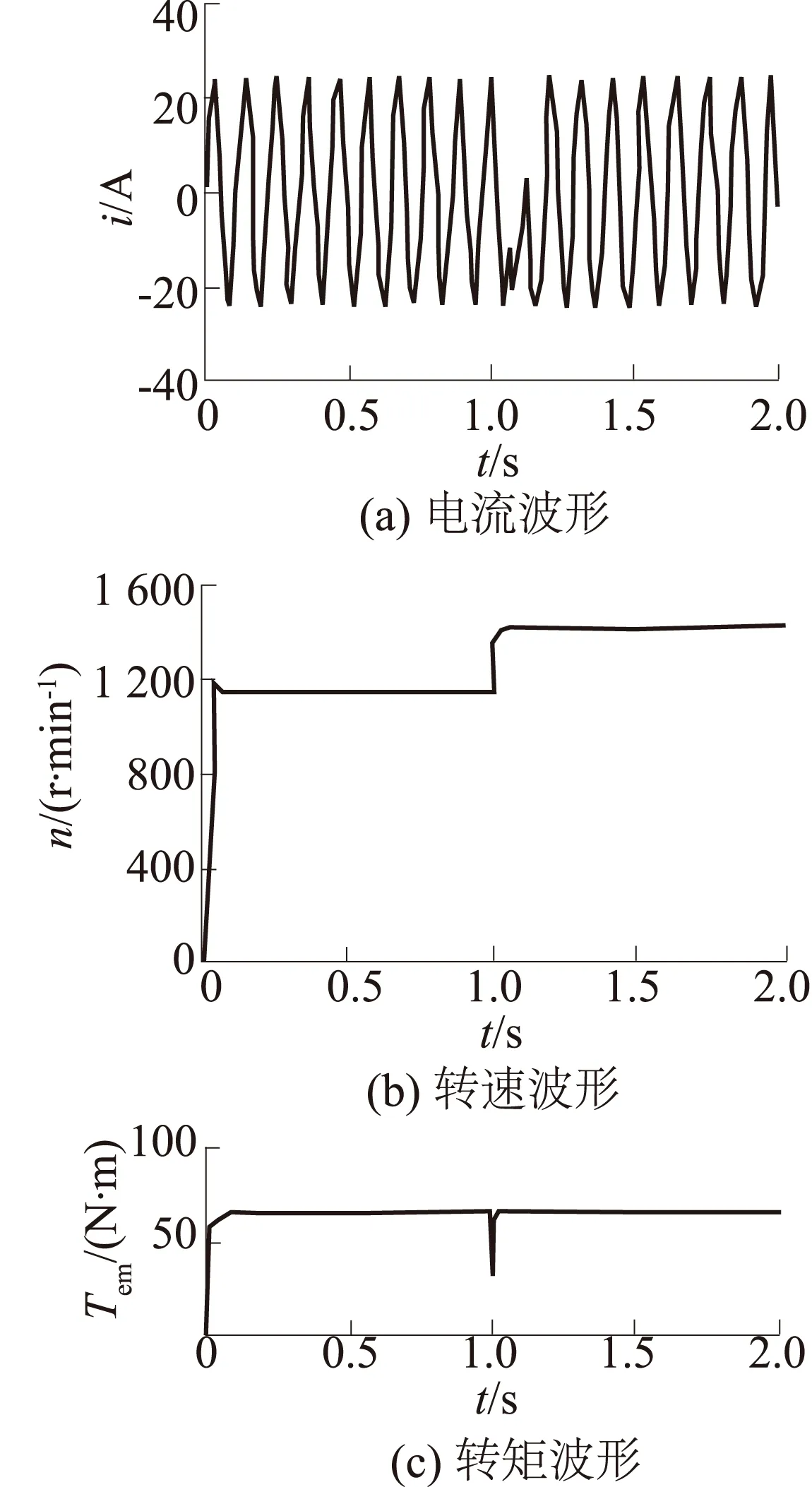
图6 给定转速突变时定子电流、转速和转矩的波形Fig.6 Waveforms of stator current, rotational speed and torque on the condition of abrupt change of given rotational speed
调速系统矢量变换部分的Simulink仿真图如图5所示。采用Simulink软件根据图3所示的矢量控制框图对整个调速系统建立仿真模型,电机带额定负载,t=0 s时给定转速为1 150 r/min,t=l s时给定转速变为1 430 r/min,电机的定子电流、转速和转矩的波形分别如图6所示。
由图6可看出,当t=1 s电机给定转速发生突变后,实际转速能很快由原来的1 150 r/min上升到新的给定转速即1 430 r/min,响应迅速;而且电机给定转速突变后定子电流响应时间也很短,说明定子电流受转速变化的影响较小;电机进行调速时,转速动态变化过程快,电磁转矩发生突变又快速恢复,表明调速系统的动态过渡速度较快,避免了较大的扰动对电流波形的影响,从而减小了电流谐波。
7 结 语
本文介绍了一种基于DSP的采用定子磁场定向的矢量控制双馈调速系统,给出了调速系统控制框图及其控制部分主程序流程图,并用MatLabSimulink软件对整个系统建立了仿真模型。仿真结果表明该矢量控制调速系统定子电流谐波小,控制精度高,动态响应快,具有较稳定的运行性能。而且该双馈调速系统中变频器仅处理转差功率,可用较小容量的变频器对大功率电机进行调速,应用于风机、泵类负载能够较好地满足节能和扩容改造2个方面的需求,再加上成本较低,因此具有广阔的应用前景[7]。
[1] 李永东.高性能大容量交流电机调速技术的现状及展望[J].电工技术学报,2005,20(2):1-10.
[2] 王晓晨,李红梅,孙凤香.基于矢量控制的矿井提升机交流双馈调速系统[J].煤炭学报,2009,34(10):1424-1429.
[3] 沈 睿.基于DSP的双馈电机调速系统的研究[D].武汉:湖北工业大学,2007.1.
[4] 陈 健,赵 磊,杨彦杰,等. 一种新型的双馈电机的矢量控制方法[J].微计算机信息,2007,23(7):24-25.
[5] 李永亮,赵 飞,王殿俊. 双馈电机矢量控制系统及仿真[J].机电元件,2011,(6):47-50.
[6] 李文杰,李 梅,朱一凡. 提升机基于双馈调速的研究[J].煤矿机械,2010,31(7): 40-42.
[7] 张 军,王彩虹,陈 涛.基于双变量交-交变频器的双馈调速系统的研究[J].矿山机械,2006,34(1):92-93.
(编辑:黄 玲)
Doubly-fed Speed Regulation Applied in Motorof Pumping Station
LI Jin
(School of Mechanical & Electrical Engineering, Nanchang Institute of Technology, Nanchang 330099,China)
The alternating current dynamo with invariable speed is used in many pumping stations at present, which wastes lots of electric energy, but the common speed regulation is relatively difficult due to the high-voltage. In order to solve the problem above,we provided a doubly-fed speed regulation system. An AC/AC cycloconverter was taken as main circuit, and the vector control of stator magnetic field orientation was adopted in this system. Besides,we provided the block diagram and flow chart of main program for control part of the system, and simulated the overall system by MatLab/Simulink, and obtained the simulation waveform. The simulation results indicate that the speed regulation system has small harmonic stator current, high control precision, quick dynamic response and stable working performance. In addition, the capability of frequency converter can be decreased largely and the costs are reduced dramatically with limited speed range, so the system has broad application prospect in the speed regulation of pumping station motor.
doubly-fed speed regulation;motor with frequency modulation;vector control;MatLab/Simulink;simulation test
2014-08-02;
2015-01-28
李 瑾(1974-),女,湖北武汉人,副教授,硕士,主要研究方向为电力电子,(电话)13027220617(电子信箱)meimei9022@sohu.com。
10.11988/ckyyb.20140634
2016,33(01):147-150
TM343
A
1001-5485(2016)01-0147-04
