正弦空间电压矢量的磁链分析及其在软起动器中的实现*
2016-12-01孟彦京高泽宇
孟彦京,高泽宇,陈 君
(陕西科技大学 电气与信息工程学院,陕西 西安 710021)
正弦空间电压矢量的磁链分析及其在软起动器中的实现*
孟彦京,高泽宇,陈君
(陕西科技大学 电气与信息工程学院,陕西 西安 710021)
针对调压软起动器降低电流效果差且转矩不足,变频器昂贵且旁路困难等电机起动问题,打破直流供电局限,分析正弦供电下的空间电压矢量变频原理及磁链轨迹,将其应用于反并联晶闸管调压主电路,设计多级分频切换的软起动策略,研制了一种具有有级变频功能的正弦空间电压矢量软起动器。MATLAB系统仿真验证了其原理的正确性与方案的可行性,实验结果表明该软起动器可以起动带有额定负载的异步电机并且将起动电流限制在额定电流4倍以下。
正弦空间电压矢量;磁链轨迹;软起动策略;有级变频
0 引言
交流异步电机构造简单、运行可靠,被广泛使用,占工业动力源的90%以上,但交流异步电机直接起动时电流大而转矩小,对电机自身和电网有不利的影响[1-2]。传统调压软起动能减少冲击电流,但不变频的情况下转矩与电压的平方成正比,因此这种起动方式转矩不足,难以起动重载或带大惯性负载电机[3-4]。此外,其不能改变定子磁场的转速,电机刚起动时,定转子转差很大,起动功率因数低。而变频器软起动又存在成本高且切换到工频后难以实现旁路的不足。
目前,探索如何以晶闸管调压电路为基础实现有级变频软起动成为解决上述问题的关键。文献[5-6]是国内外最早提出离散变频控制思想的文章,其分析和仿真了离散频率的产生和运行过程,提出正负序电压选择方法,但是这种软起动方式转矩脉动大[7-9],有时无法起动电机也会因为谐波污染电网。专利[10]及文献[11]初次提出正弦空间电压矢量软起动方法,但其原理论述依然局限于直流供电下的空间电压矢量,没有交代清楚正弦空间电压矢量下的电机定子磁链形成轨迹,也没讨论起动电机动态过程和仿真验证。
本文具体分析交流供电下的空间电压矢量原理,绘制其磁链形成轨迹,并基于其原理设计多级分频切换的正弦空间电压矢量软起动器,有效减小起动电流。
1 正弦空间电压矢量原理
现有的空间电压矢量理论阐述的都是直流供电情况下的空间电压矢量,属于交直交变频。本次所阐述的是基于正弦供电的空间电压矢量理论,属于交交变频,其以定子磁链轨迹为被控对象,通过三相反并联晶闸管主回路直接在电网三相正弦电压供电的情况下,有选择地使某两相导通,形成一个交变的电压矢量。如图1所示,7个周期内顺序触发 uAC、uBC、uBA、uCA、uCB、uAB六个电压矢量形成一个工频电网7分频下的类正六边形定子磁链。通过调整相邻矢量间隔时间,改变频率,形成其他分频下的类正六边形定子磁链。通过调整开通的触发角改变六个电压矢量的幅值进而改变磁链幅值。这样把类正六边形磁链轨迹旋转频率与触发角相应结合进行磁链控制,将其应用于异步电机软起动,实现有级变频软起动,有效提升转矩。
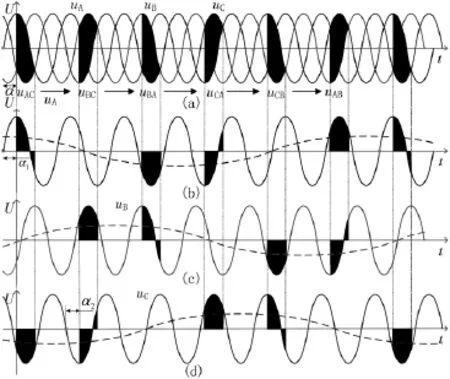
图1 正弦空间电压矢量形成示意图
2 正弦空间电压矢量磁链计算方法
结合文献[11-12],按照上述控制方式,通过仿真和实验得出三相异步电动机可以在电网工频 7、4、3、2分频(7.14 Hz、12.5 Hz、16.7 Hz、25 Hz)下稳定运行。以7分频控制下的定子磁链形成过程为例阐述基于正弦供电的空间电压矢量的磁链计算方法并且根据磁链瞬时值数学函数来绘制工作于正弦空间电压矢量下的电机定子磁链轨迹。
空间电压矢量的计算公式为:

式中 a=ejγ,γ=2π/3,dA,dB,dC是各相的导通状态量,当该相反并联的晶闸管任意一个被触发时其值为1,全未被触发其值为0。uA,uB,uC为三个相电压的瞬时值:

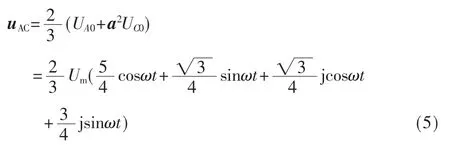
当A相正方向的晶闸管和C相反方向的晶闸管被触发时,形成电压矢量 uAC,dA=1,dB=0,dC=1,此时由式(1)推得电压矢量uAC瞬时公式:
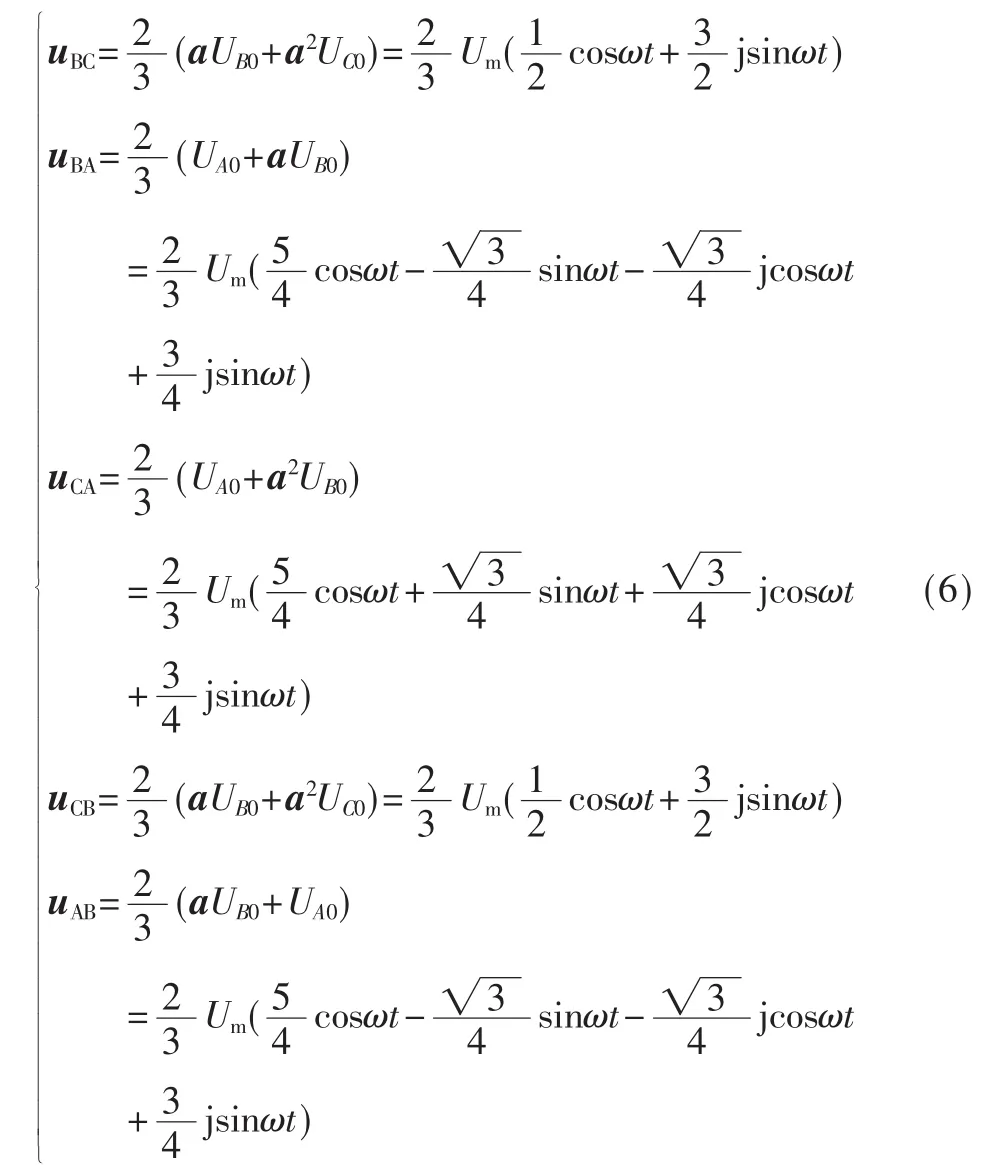
同理推得其他电压矢量瞬时值公式:
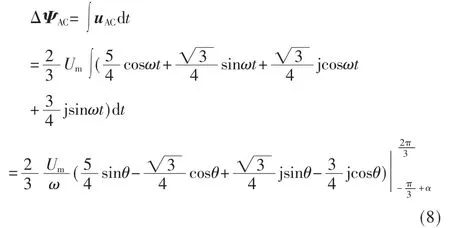
对电压矢量积分可以得到磁链变化量,将电压矢量uAC带入式:

并且将对时间的积分转化为相对于相电压uA的角度积分,可以得到电压矢量uAC形成的磁链变化量瞬时值计算函数:
同理推得其他电压矢量形成的磁链变化量瞬时值计算函数:

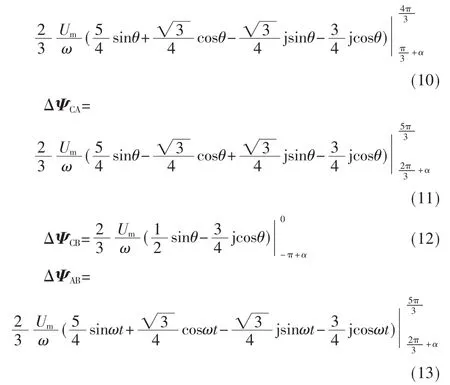
式中α为触发角。在MATLAB编写上文推导的磁链瞬时变化量函数。考虑磁链的累积,即 Ψt=Ψ+ΔΨ,绘制基于正弦供电的空间电压矢量磁链轨迹如图2所示。
图2中实线为正弦空间电压矢量的磁链轨迹,虚线为直流供电空间电压矢量的磁链轨迹。通过分析对比可以总结:直流供电的空间电压矢量的磁链轨迹是正六边形,而正弦空间电压矢量将其每条边变为了椭圆曲线的一部分,所以基于正弦供电的空间电压矢量的磁链轨迹比直流供电的空间电压矢量磁链轨迹更接近圆形。
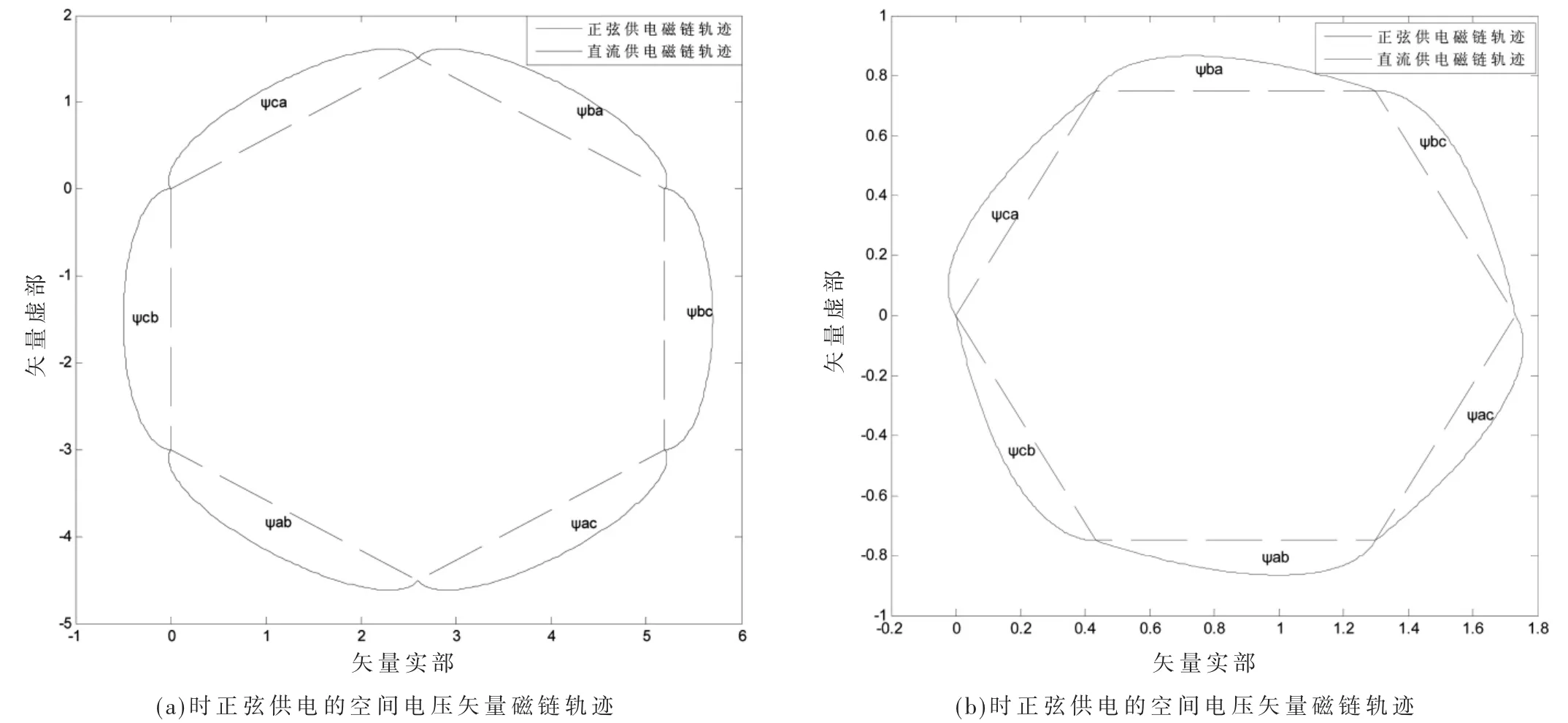
图2 基于正弦空间电压矢量磁链轨迹
3 系统设计
正弦空间电压矢量软起动器的控制系统整体框图如图3所示。主要由三相反并联晶闸管主电路、电压检测、电流检测、触发电路、微处理器(STM32)等部分组成。STM32通过电压检测电路采集电压,对三相电压进行缺相检测和相序检测,同时对起动时间进行计数,其根据软起动模式、分频级数以及触发角等参数,对电压信号处理,按照原理中阐述的控制方法选择正确的时刻给相应的晶闸管发出触发信号,触发信号经过触发电路后触发晶闸管导通,实现正弦空间电压矢量软起动。起动完成后,通过旁路接触器将空间电压矢量软起动器旁路,电机开始全压运行。
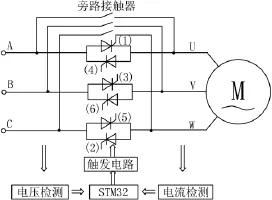
图3 软起动控制系统框图
4 多级分频起动策略
感应电机在 7.14 Hz下能稳定运行,如果直接切换到电网工频50 Hz,由于频率的过渡太大,会产生短暂电流上升和转矩下降。可以在7.14 Hz切换到工频电网时适当降低电压,然后使用斜坡升压的方法把电机电压提升到额定电压,这样在空载或轻载下足以完成频率的切换,但是重载或满载时,电流显著增大,转矩下降明显,甚至转速会下降到接近于0,再斜坡升压时已相当于零速开始调压调速起动,达不到提升起动转矩的目的。在7.14 Hz到50 Hz间插入一些中间频率段,比如12.5 Hz、16.7 Hz、25 Hz,可使各频率段之间平稳切换。再根据实际负载情况在切换到工频时适当加入一段调压以实现电机切换时降低起动电流。通过实验验证,空间电压矢量控制下分频系数为 1、3、4、7时所得到的是正相序电压,电机可以良好运行,可以通过这些分频下电压矢量的平移与合并实现变频。2分频属于负序电压只用作过渡频率运行1到2个周期。只要各频率段过渡过程触发角选择合适就可以实现电机启动时频率的无扰动切换,其各分频导通电压波形如图4所示。
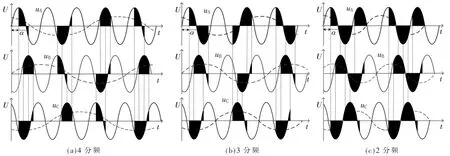
图4 各级分频电压波形图
5 系统仿真及实验结果
5.1系统仿真
根据以上对正弦空间电压矢量软起动器的原理、方案、控制策略的分析,在 MATLAB/Simulink中搭建模型,对整个系统进行仿真,仿真模型如图5所示,模型中使用的电机参数为:PN=30 kW、UN=380 V、RN=1 460 r/min。

图5 正弦空间电压矢量仿真图
仿真模型中频率切换控制、触发角调整和晶闸管选择都是通过编写function函数实现的,整个软起动过程包含了4个频段的切换,分别为7.14 Hz、12.5 Hz、16.7 Hz、50 Hz。各频段运行时间和触发角变化范围如表1所示。
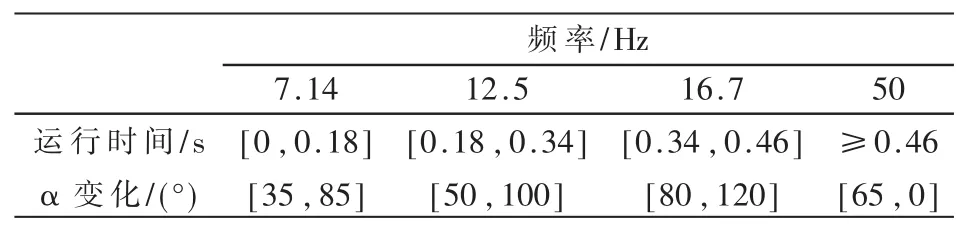
表1 各频段运行时间和触发角变化范围
仿真结果如图6所示,图6(a)为正弦空间电压矢量控制下的有级变频软起动仿真结果,电机带50%负载,在其转速波形中电机从零转速起在7.14 Hz空间电压矢量控制下起动,转速平稳在nN/7后,在0.18 s切换到12.5 Hz,转速升至nN/4后,在0.34 s切换到 16.7 Hz,转速升至nN/3后,在 0.46 s通过调压方式过渡到工频,此阶段触发角在0.48 s的时间内从65°减小至0°完成起动。从整个过程观察,各个频段稳定运行,切换瞬间转速过渡平滑,实现无扰切换的有级变频软起动。通过电流波形看到正弦空间电压矢量软起动整个过程峰值电流是7.14 Hz处的398 A,有效值最大时为239 A。图6(b)为无空间电压矢量的直接调压软起动下的软起动仿真结果,电机带50%负载,调压过程同样为触发角在0.48 s内从65°减小至 0°,其电流峰值为 503 A,有效值最大时为328 A。通过对比可以观察到空间电压矢量软起动将起动电流峰值降低了105 A,有效值电流降低了89 A。

图6 电机起动过程电流、转速、转矩仿真波形
5.2实验测试
搭建STM32为核心控制器、三相反并联晶闸管为主回路的电机软起动硬件平台,将正弦供电的空间电压矢量原理和有级变频的起动策略应用于软起动器,实际运行,测试数据。实验所用电机额定功率22 kW,额定电流42.5 A,磁粉制动器作为可调负载。7.14 Hz、12.5 Hz、16.7 Hz、50 Hz频段下的实际电压波形如图7所示。其各自包络线所形成的正弦波形周期都是与各自分频相对应的。

图7 正弦空间电压矢量软起动A相电压波形
实验数据如表2所示,从实验数据可以看出,电机空载到满载的各种负载情况,正弦空间电压矢量软起动器都可以成功地将其起动,满载的情况下其起动电流仅为额定电流的3.46倍。而直接起动时,即使电机空载,其起动电流也会达到额定电流的5~8倍,由此证明这种通过有级变频起动电机的正弦空间电压矢量软起动器可以很好地降低起动电流。

表2 实验数据
6 结束语
本文分析了利用正弦空间电压矢量实现交交变频的基本原理,通过正弦电压矢量积分的计算方法推导出交流供电下的空间电压矢量的磁链瞬时值函数,绘制了忽略定转子耦合与磁链衰减的理想磁链轨迹。通过与直流供电的空间电压矢量形成的理想正六边形磁链轨迹对比,发现其将正六边形的六条边椭圆化,更加接近圆形磁场。此外将此原理应用于反并联晶闸管为主回路的异步电机软起动器中,制定整体方案,使用多级分频切换的变频软起动策略,设计正弦空间电压矢量软起动器。通过系统仿真验证方案可行性,通过实验测试验证了正弦空间电压矢量软起动器可以成功起动电机,将起动电流限制在额定电流的4倍以下,有效降低起动电流,具有一定的意义和推广价值。
[1]李涛丰,汪洪亮,康勇,等.大功率电机直接起动的逆变器控制模式切换策略[J].电工技术学报,2012,27(6):69-75.
[2]戴圣伟,王欣,李燕林,等.三相异步电机的智能软起动[J].电机技术,2012(10):30-32.
[3]吕广强,许扬,程明,等.新型软起动最小转矩脉动的控制策略研究[J].中国电机工程学报,2005,25(19):140-145.
[4]周振华,崔学深,王月欣,等.感应电机软起动初始两相瞬态电流解析与控制[J].现代电力,2012,29(2):50-55.
[5]GINART A,ESTELLER R,MADURO A,et al.High starting torque for AC SCR controller[J].IEEE Transactions on Energy Control,1999,14(3):553-559.
[6]赵凯岐,王毅,徐殿国,等.晶闸管控制的感应电机中提高起动电磁转矩的一种新策略[J].中国电机工程学报,2004,24(3):145-150.
[7]GORBUNOV R L,POSKONNYY G I.Symmetrical discrete frequency control for AC-chopper with mutual switching function[C].Micro/nanotechnologies and Electron Devices,International Conference of Young Specialists on.IEEE,2014.
[8]LI D,DENG X.Research on discrete variable frequency soft starting and electricity-economizing control system of induction motor[C].International Conference on Electric Information and Control Engineering.IEEE,2011.
[9]NIED A,OLIVEIRA J De,CAMPOS RF De,et al.Soft starting of induction motor with torque control[J].IEEE Transactions on Industry Application,2010,46(3):1002-1010.
[10]孟彦京,李林涛,陈君,等.一种磁场矢量控制软起动器及其控制方法:中国,CN1033618480A[P].2014-03-05.
[11]孟彦京,张陈斌,陈君,等.一种基于正弦波电压空间矢量的新型软起动器[J].电力电子技术,2014,48(7):28-35.
[12]崔学深,罗应力,周振华,等.感应电动机的电源快速软投入技术初始瞬态分析[J].中国电机工程学报,2009,29(6):93-99.
Sine space voltage vector flux linkage analysis and its implementation in the soft starter
Meng Yanjing,Gao Zeyu,Chen Jun
(College of Electrical and Information Engineering,Shaanxi University of Science&Technology,Xi′an 710021,China)
In order to solve the problem that the voltage regulating soft starter′s electric current reducing effect is poor,in addition, it′s lack of torque and the inverter are expensive beyond that it′s difficult to bypass,this paper analysis the frequency changing theory and flux linkage locus of space voltage vector under sine power supply breaking the dc suppling limited,apply that to the voltage regulation circuit,design multistage switching frequency soft start strategy and develop sine space voltage vector of the soft starter which has the function of step frequency changing.The MATLAB simulation verifies the validity and feasibility.Experimental results show that the soft starter can start asynchronous motor with rated load and limit the start current under the four time of the rated current.
sine space voltage vector;flux linkage locus;soft start strategy;step frequency changing
TM301
A
10.16157/j.issn.0258-7998.2016.09.035
国家自然科学基金(51577110)
2016-02-26)
孟彦京(1956-),男,博士,教授,主要研究方向:电力电子与电气传动、自动化控制。
高泽宇(1991-),通信作者,男,硕士研究生,主要研究方向:电力电子与电气传动、自动化控制,E-mail:740696366@qq.com。
陈君(1990-),男,硕士研究生,主要研究方向:电力电子与电气传动、自动化控制。
中文引用格式:孟彦京,高泽宇,陈君.正弦空间电压矢量的磁链分析及其在软起动器中的实现[J].电子技术应用,2016,42(9):133-137,142.
英文引用格式:Meng Yanjing,Gao Zeyu,Chen Jun.Sine space voltage vector flux linkage analysis and its implementation in the soft starter[J].Application of Electronic Technique,2016,42(9):133-137,142.
