汽车制动系统可靠性预测的模糊神经网络研究
2016-12-01葛友华
倪 泉 葛友华 王 斌
(常州大学机械工程学院1,江苏 常州 213164;盐城工学院机械工程学院2,江苏 盐城 224001)
汽车制动系统可靠性预测的模糊神经网络研究
倪 泉1葛友华2王 斌2
(常州大学机械工程学院1,江苏 常州 213164;盐城工学院机械工程学院2,江苏 盐城 224001)
计时传统模糊神经网络算法在汽车制动系统(ABS)可靠性预测中存在预测精度不高、误差较大等问题,提出了一种基于优化隶属函数的改进模糊神经网络算法。采用偏移优化方法对模糊控制算法的隶属函数进行改进;引入粒子群算法进行自适应惯性权重的寻优能力、收缩因子的收敛速度优化;最后与模糊神经网络算法融合,调整原算法的中心值、宽度值和连接权值,避免原算法在汽车制动系统可靠性预测中陷入局部最小值。仿真实验表明,改进的模糊神经网络算法具有比传统神经网络算法和模糊控制算法更小的预测误差。
汽车制动系统(ABS) 可靠性预测 模糊神经网络 粒子群算法(PSO) 函数优化
0 引言
汽车的安全性能已经成为人们重视的主要方面[1]。汽车安全性能研究起步较早,首先应用于实际的是汽车制动系统(automotive braking system,ABS),接着是防滑系统(acceleration slip regulation,ASR)、车身电子稳定系统(electronic stability program,ESP)等[2-3]。但是,交通事故依然频发,汽车安全性能仍需要提高[4]。
从汽车制动系统可靠性预测研究来看,涌现出了Monte-Carlo 法、Bayes法、故障模式、影响和危害性分析(failure mode,effects and criticality analysis,FMECA) 法和故障树分析(fault tree analysis,FTA)法等[5-10]。蔡骏宇提出基于IRAS 的汽车故障检测模型,该模型一定程度上对汽车安全性能进行了检测[6]。Che Yejun等建立了基于故障树法的汽车发动机可靠性分析模型[7]。刘颖提出了基于最大熵试验法的小型发动机安全性能预测模型[9]。张士峰等对小子样系统可靠度评估方法进行了一定的研究[11]。
针对以上算法准确性不足的问题,设计了一种模糊神经网络算法,采用模糊控制对神经网络算法进行误差的控制,以提高预测的准确性。
1 模糊神经网络模型的局限性
对于汽车制动系统的可靠性预测,目前用的最多的是模糊神经网络模型,其模型的构建方法如下所示。
第0层:将汽车制动系统传递的各个参数作为模糊神经网络中每个神经元的值,即神经元的输入值:
(1)
此层的神经元数即汽车制动系统传递的参数个数。

(2)

(3)
或
(4)
第2层:每个神经元是一个标以∏的固定神经元,它的输出是所有制动系统参数输入信号的积:
(5)
式中:第i个制动系统参数神经元的输入相当于第i条可靠性预测的条件,其输出就是可靠性预测的指标。其中,i=1,2,...,m,m是可靠性预测指标数。
第3层:计算输出。

(6)
第4层:求和。
(7)
第5层:归一化。
(8)
从上述基于模糊神经网络的汽车制动系统可靠性预测模型中可以看出,虽然能够成功地对汽车制动系统进行可靠性评估,但是模糊神经网络本身存在的问题还是没有得到妥善的处理。所以,必须对模糊神经网络在数据较大时容易进入局部最优的问题进行优化。
2 模糊神经网络算法的优化
2.1 隶属函数的优化
对于离散论域隶属函数,本文采用偏移优化的方法对其改进。如式(9)所示,有3个参数a、b和c。
(9)
初始隶属函数的参数可由式(8)~式(10)构成。其中,xmax和xmin为x的最大值和最小值;mf_n为x对应的隶属函数的个数。
(10)
b0=2
(11)
c是隶属函数的中心。首先,x的每个隶属函数的初始ci在[xmin,xmax]区间内平均产生,即:
(12)
然后,每个参数产生一个随机的偏移量。
a1=a0×Ra
(13)
b1=b0×Rb
(14)
式中:Ra、Rb为一个大于0的有一定范围的随机数,实际上a和b的变化范围可以小一点。
(15)

(16)

2.2 基于改进粒子群的模糊神经网络
因为传统的模糊神经网络算法往往会出现局部最小的问题,本文引入粒子群算法。一般的粒子群算法的全局收敛能力无法达到模糊神经网络算法的需求,所以本文首先对粒子群算法进行改进。
① 基于自适应惯性权重的寻优能力优化。
一般的粒子群算法中,惯性权重w代表了粒子对其父代飞行速度的作用程度,所以如果调正惯性权重的数值,就可以控制算法的寻优能力。
基于此,本文提出了对惯性权重进行自适应优化,如下式所示:
(17)
式中:Tmax为最大的迭代次数;wini为最初的惯性权重;wend为粒子进化到最大程度时的惯性权重。
一般情况下,选取wini=0.9、wend=0.4时,算法可以表现出更好的性能。
② 基于收缩因子的粒子收敛速度优化。
在对惯性权重进行调整的基础上,本文还引入收缩因子对粒子的收敛速度进行了优化。基于收缩因子的粒子速度及位置的表达式为:
vid=χ[vid+c1r1(pid-xid)+c2r2(pgd-xid)]
(18)
其中,收缩因子取值公式如下:
(19)
式中:k的取值范围为φ=c1+c2,并且φ>4。
③ 寻优范围限定。
为了使粒子群算法能更好地应用于模糊神经网络,本文对粒子群算法进行范围的限定,设最优解集的大小为B。
首先,将迭代过程中种群的最优解全部都存储到B当中,得到B值;再计算出最优解拥挤距离,按照大小进行排列;接着,按照全局当中的极值来选择策略B当中的解值;然后将这个解当作全局最优解,并对粒子的速度进行更新,如下式所示:
(20)
(21)
在此基础上,对粒子的位置进行控制,控制范围为:
(22)
最后,将优化后的粒子群算法引入模糊神经网络算法中,对模糊神经网络的输入样本用改进粒子群算法进行聚类优化,得到隶属度中心,从而提升模糊神经网络的寻优能力和寻优速度。
基于改进粒子群算法的模糊神经网络算法中,每一个粒子和每一组聚类中心为一对一映射,用G[P]表示,其中G包含了粒子的各个属性,P表示粒子的数量。G[P]的适应度函数如下式所示。
(23)
式中:x为每个样本到聚类中心的距离的总和;c为聚类中心;θ为数据集合;J为聚类类别的总数。
由传统的算法可知,如果与粒子群算法融合,就必须对中心值参数、宽度值参数和连接权值进行调整。本文的调整策略如下。
① 采用本文提出的改进粒子群算法对隶属度函数中心进行求解。
② 用确定的隶属度函数中心来对宽度值参数进行求解:
(24)
式中:c为聚类中心;θ为样本集合;M为样本数量。
③ 用伪逆法对连接权值进行求解,如下式所示。
W=S-1T
(25)
式中:S为输出矩阵;T为期望矩阵。
3 算法性能仿真
为了验证本文提出的改进算法的有效性,对其进行仿真试验。本次仿真试验的汽车为大众帕萨特,型号为2014款1.4T手动尊雅版,发动机型号为EA111,最大功率为96 kW,排量为1 390 mL,进气形式为涡轮增压,汽缸数为4个。
首先用改进的模糊神经网络模型(FNN)对汽车制动系统中的制动器参数预测的误差进行仿真试验,并与模糊控制算法(FC)和神经网络算法(NN)进行对比,结果如表1和图1、图2所示。

表1 误差对比统计表
表1中,NN为神经网络,FC为模糊控制,FN为模糊神经网络。

图1 改进模糊神经网络与传统神经网络误差对比
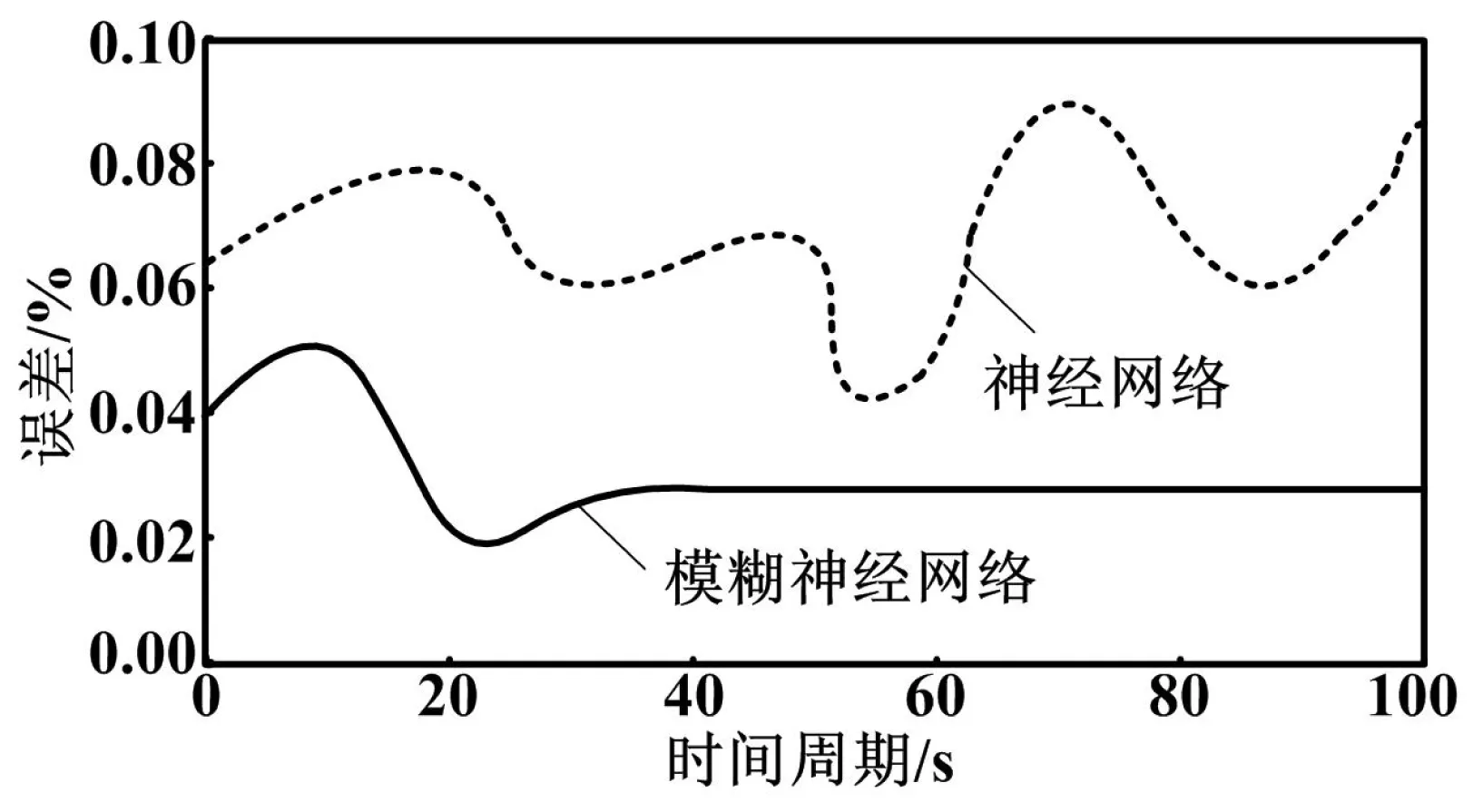
图2 改进模糊神经网络与模糊控制算法误差对比
然后采用人工神经网络算法、模糊控制算法和本文提出的改进模糊神经网络算法对汽车制动系统进行整体性可靠性预测,得出汽车制动的安全系数,结果如图3和表2所示。
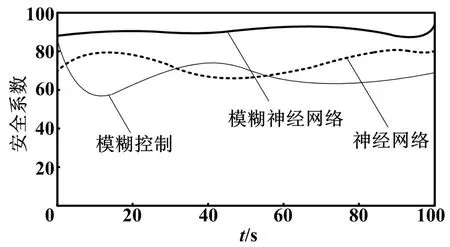
图3 三种算法对汽车制动安全系数的仿真结果

表2 汽车制动安全系数分析
最后,在试验条件相同的情况下,对人工神经网络算法、模糊控制算法和本文提出的改进模糊神经网络算法进行稳定性分析,结果如表3和图4所示。
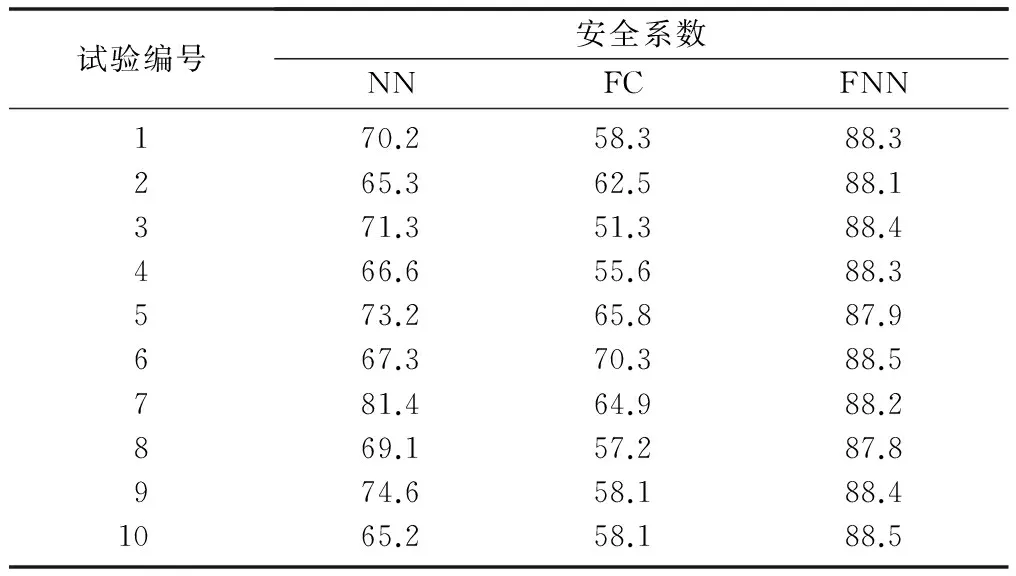
表3 汽车制动安全系数分析

图4 三种算法对汽车制动安全系数的仿真结果
从仿真结果可以看出,本文提出的基于优化隶属函数和改进粒子群算法的模糊神经网络算法利用改进的粒子群算法控制了预测的稳定性,比其他两种算法对汽车制动系统可靠性预测的效果要好,大大降低了预测的误差,提高了汽车制动系统的安全性能。
4 结束语
汽车制动系统的安全性能历来是人们最为关心的问题之一。本文根据汽车制动系统,提出了汽车制动系统可靠性预测算法。从仿真结果可以看出,本文提出的基于汽车制动系统可靠性预测的改进模糊神经网络算法的误差远远小于传统算法,证明本文的改进策略切实有效。
[1] 初亮,蔡健伟.汽车制动防抱死系统分离路面的控制策略[J].吉林大学学报:工学版,2014(2):287-291.
[2] Gong X W.Braking force distribution of electric vehicles based on braking stability[J].Journal of Chang'an University:Natural Science Edition,2014,34(1):103-108.
[3] 唐家栋,刘志远.汽车制动压力的切换PI控制方法研究[J].汽车技术,2014(3):24-30.
[4] 赵韩,胡金芳.混合动力汽车制动稳定性分层协调控制策略[J].汽车工程,2014,36(1):93-100.
[5] Wang M J.Multiple objective decision design for disk brake based on non-cooperative game theory[J].Modern Manufacturing Engineering,2014(1):9-14.
[6] 蔡骏宇.基于MEMS的汽车制动性能道路测试技术研究[J].电子技术应用,2013,39(6):77-80.
[7] Che Y J.Analysis and research on automotive brake performance[J].Science Technology and Engineering,2013(6):1695-1699.
[8] Zhang H Y.Automobile anti-lock braking system control strategy simulation[J].Manufacturing Automation,2013,34(18):87-90.
[9] 刘颖.汽车制动优化控制方法研究[J].计算机仿真,2012,29(8):340-343.
[10]尹梦晨.基于CFD分析的汽车空气动力学制动研究[J].合肥工业大学学报:自然科学版,2011,34(3):326-330.
[11]张士峰,蔡洪.小子样条件下可靠性试验信息的融合方法[J].国防科技大学学报,2004,26(6):25-27.
Research on the Fuzzy Neural Network used for Reliability Prediction of Automotive Braking System
To overcome the disadvantages of traditional fuzzy neural network algorithm in reliability prediction of automotive braking system,e.g.,low prediction accuracy and large error,etc.,the improved fuzzy neural network algorithm by optimizing membership function is proposed.By adopting the method of offset optimization,the membership function of fuzzy control algorithm is improved,and the particle swarm algorithm is introduced to optimize adaptive inertia weight optimization capability and convergence rate of contraction factor,finally the fuzzy neural network algorithm is merged to adjust the central value,width value,and connection weight value of original algorithm,to avoid falling into local minimum in reliability prediction of automotive braking system with original algorithm.The simulation shows that the improved fuzzy neural network algorithm offers smaller prediction error than traditional neural network algorithm.
Automotive braking system(ABS) Reliability prediction Fuzzy neural network Particle swarm optimization(PSO) Function optimization
江苏省自然科学基金面上资助项目(编号:BK20131221)。
倪泉(1987-),男,现为常州大学机械制造及其自动化专业在读硕士研究生;主要研究方向为汽车制动系统研究。
TP391+.9;TH6
A
10.16086/j.cnki.issn1000-0380.201601009
修改稿收到日期:2015-03-16。
