APP下载
搜索
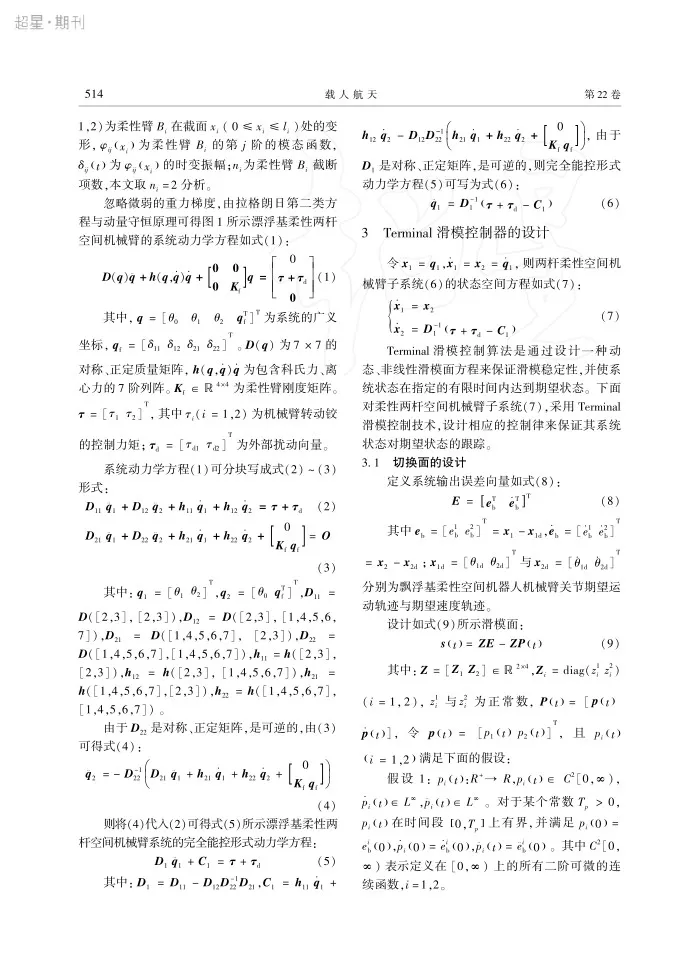
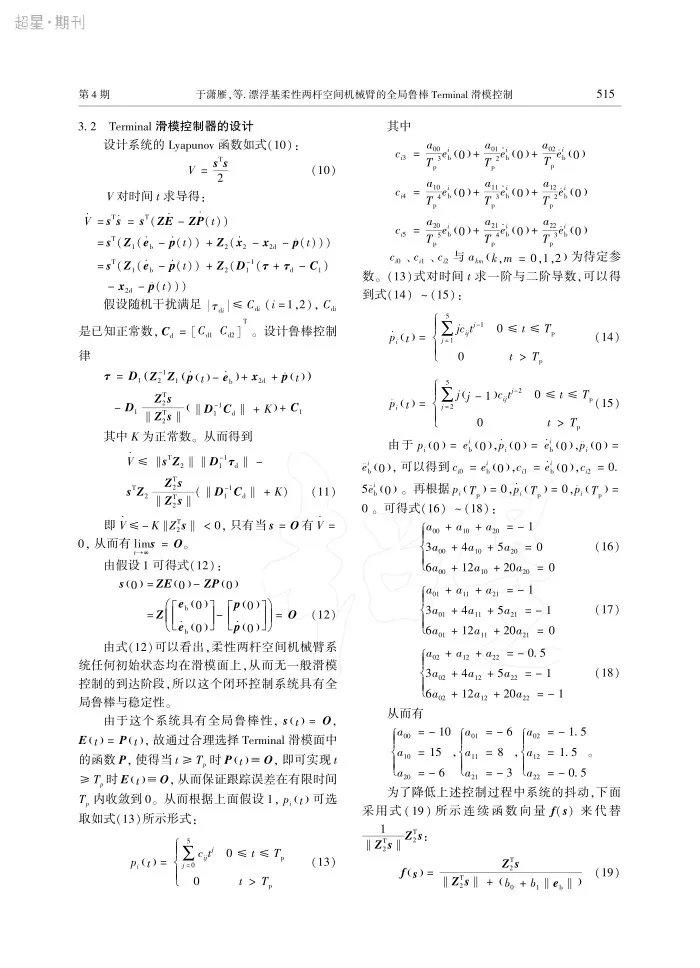
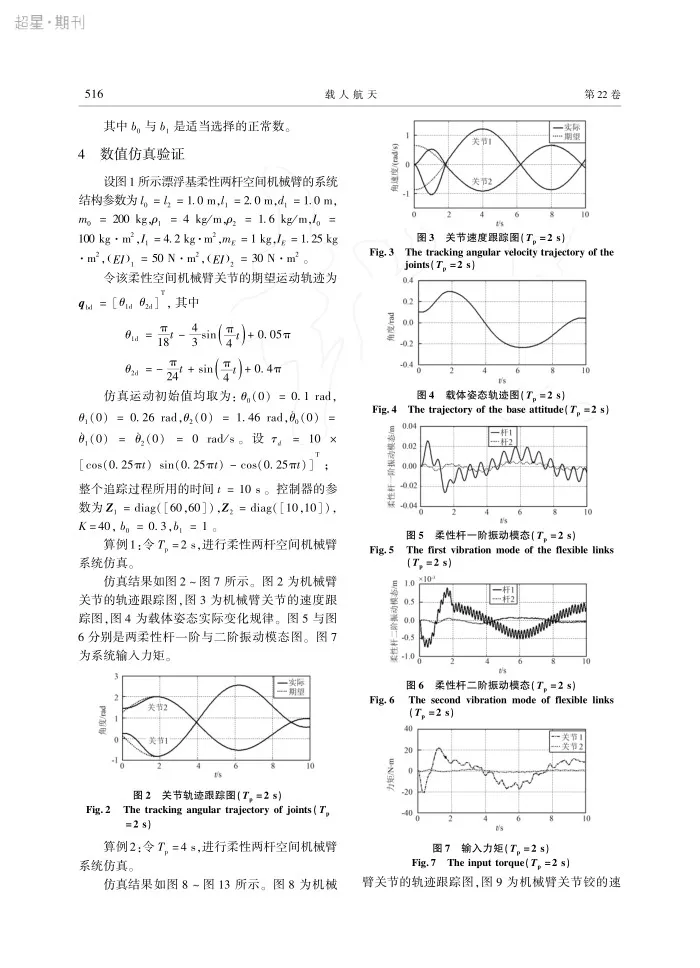
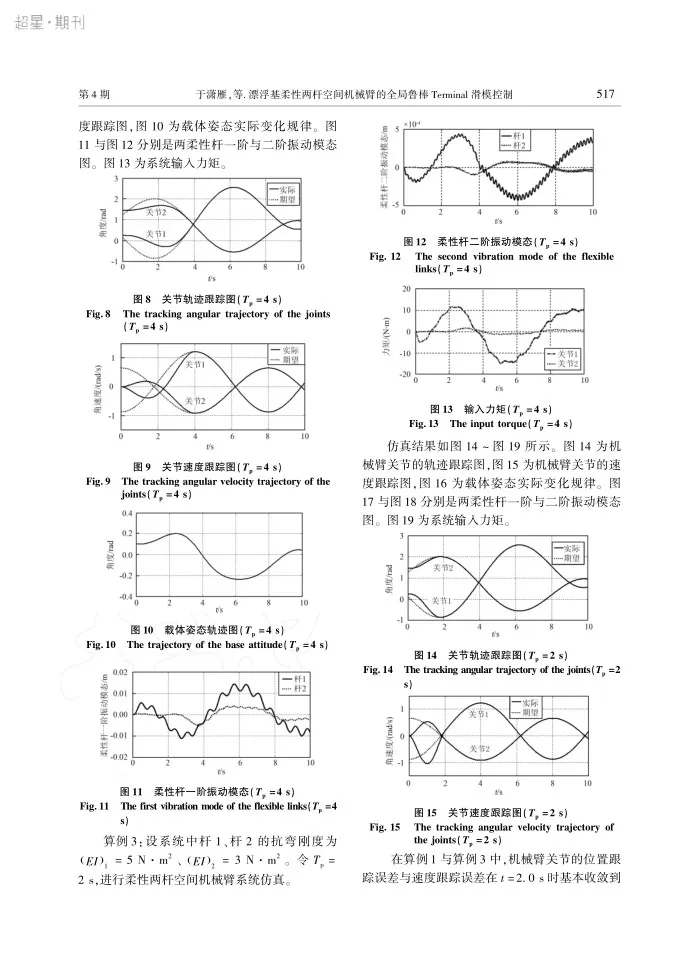
漂浮基柔性两杆空间机械臂的全局鲁棒Terminal滑模控制
2016-12-01
于潇雁,陈力
载人航天
订阅
2016年4期
收藏
关键词:
鲁棒
滑模
全局
猜你喜欢
鲁棒
滑模
全局
Cahn-Hilliard-Brinkman系统的全局吸引子
量子Navier-Stokes方程弱解的全局存在性
基于学习的鲁棒自适应评判控制研究进展
基于组合滑模控制的绝对重力仪两级主动减振设计
PMSM调速系统的自学习滑模控制
并网逆变器逆系统自学习滑模抗扰控制
落子山东,意在全局
目标鲁棒识别的抗旋转HDO 局部特征描述
基于Cauchy鲁棒函数的UKF改进算法
目标轨迹更新的点到点鲁棒迭代学习控制
杂志排行
《师道·教研》
2024年10期
《思维与智慧·上半月》
2024年11期
《现代工业经济和信息化》
2024年2期
《微型小说月报》
2024年10期
《工业微生物》
2024年1期
《雪莲》
2024年9期
《世界博览》
2024年21期
《中小企业管理与科技》
2024年6期
《现代食品》
2024年4期
《卫生职业教育》
2024年10期
载人航天
2016年4期
载人航天
的其它文章
虚拟训练仿真中空间定向能力的影响因素分析
天然表面活性剂在空间站洗浴中发泡性能的初步研究
纳米银复合涂层对空间下行微生物杀菌性能的实验研究
空间站运营任务安全性评估工作研究
空间环境对微生物的影响及应用
一种空间应用与科学数据分发共享服务平台的设计与实现