基于模糊聚类的ZigBee室内定位系统设计*
2016-11-30何海平
何海平,郭 杭,方 爽
(1.南昌大学 信息工程学院,江西 南昌 330031;2.南昌大学 空间科学与技术研究院,江西 南昌 330031)
基于模糊聚类的ZigBee室内定位系统设计*
何海平1,郭杭2,方爽1
(1.南昌大学 信息工程学院,江西 南昌 330031;2.南昌大学 空间科学与技术研究院,江西 南昌 330031)
随着计算机技术及传感技术的发展,基于位置服务(LBS)逐渐成为研究热点。在采用德州仪器公司CC2530芯片设计的一套ZigBee室内定位系统的基础上,提出了基于模糊聚类的加权最邻近定位算法,并利用设计的ZigBee室内定位系统进行实验。实验结果表明,采用基于模糊聚类的加权最邻近定位算法,ZigBee室内定位系统的平均定位精度有了一定的提高,平均定位精度达到了1.47 m,并且与常见的 NN定位算法、KNN定位算法、贝叶斯定位算法的定位效果进行了对比。
室内定位系统;CC2530;模糊聚类;ZigBee;指纹库定位算法;加权最邻近算法;RSSI
0 引言
人类大部分活动都是在室内进行的,因此进行室内定位与导航研究具有非常重要的意义。目前室内定位方法主要采用[1,2]:超声波[3]、激光、红外线[4]、RFID[5]、WiFi[6]、图像视觉[7]等。本文采用 ZigBee进行定位,因为ZigBee技术具有成本低、功耗低、复杂度低等优势[8]。本文采用德州仪器公司的CC2530芯片设计了一套ZigBee室内定位系统,在设计了ZigBee室内定位系统的基础上,提出了基于模糊聚类的 ZigBee加权最邻近定位算法[9],把通过加权最邻近定位算法得到的点进行模糊聚类,通过模糊聚类剔除大量的跳变点。最后通过本文设计的ZigBee室内定位系统进行实验,并与最邻近定位算法、加权最邻近定位算法、贝叶斯定位算法进行比较。实验结果表明,本文提出的基于模糊聚类的加权最邻近定位算法的平均定位精度有了一定的提高。
1 系统介绍
1.1系统的总体介绍
本文设计的 ZigBee室内定位系统是带有 GUI界面的无线传感网络系统,在PC终端上安装监控软件,协调器通过USB转串口数据线连接到PC上,PC就可以实时地查看、管理和配置ZigBee无线传感网络,移动节点和参考节点的位置就可以实时地显示在PC上的监控软件中。
1.2系统的工作原理
首先布设一定数量的参考节点在需要定位的区域内部,并且记录好参考节点的位置坐标;然后通过相关的定位算法就可以计算出移动节点在该定位系统中的位置信息,并且移动节点可以把自己接收到的RSSI值和物理地址发送给协调器,协调器通过USB转串口数据线把这些数据传送到终端服务器,在PC上的监控软件可以实时地显示出参考节点和移动节点的位置信息[10]。
2 基于模糊聚类的加权最邻近定位算法
在研究基于一般的加权最邻近定位算法的基础上,本文提出了一种新的基于模糊聚类的加权最邻近指纹库定位算法。算法的原理图如图1所示。首先采用加权最邻近定位算法[11]计算出各个未知点的定位坐标,然后通过模糊聚类方法来去除掉大量的跳变点,从而提高系统的定位精度。
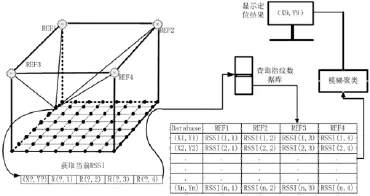
图1 模糊聚类定位算法原理图
2.1加权最邻近定位算法
首先把离线建库阶段所用的预设的采样点作为指纹数据库中的信息点,记作 Xi∈{X1,X2,…Xn};然后进入在线定位阶段:当移动节点进入需要定位的区域后,实时采集到的RSSI值记作Z,它是k个参考节点的RSSI值,即 Z=(Z1,Z2,…,Zk)。比对移动节点接收到的 Z与原先建立的指纹库Xi的欧式距离,将这两者欧式距离最小的点作为定位点。欧式距离公式如下:


因此,移动节点的位置估计可以表示为:

其中,wj为移动节点对应于指纹数据库中第 j个点的权重值,dj为相对应的第 j个点的位置坐标。
2.2模糊聚类
聚类的定义就是按照事物之间的相似程度进行区别和分类的过程。聚类分析的目标就是把特征空间中的一组数据按照某种方法分为若干类[12]。本文采用模糊 C均值聚类方法(FCM)。
模糊C均值聚类算法的目的是把各地的n个P维数据点的集合 X={x1,x2,…xn}分为 C个模糊类 Ai(i= 1,2,…,C),使得X的任何一个分量 Xk∈RP的隶属度 Ai(xk)都满足以下两个条件:
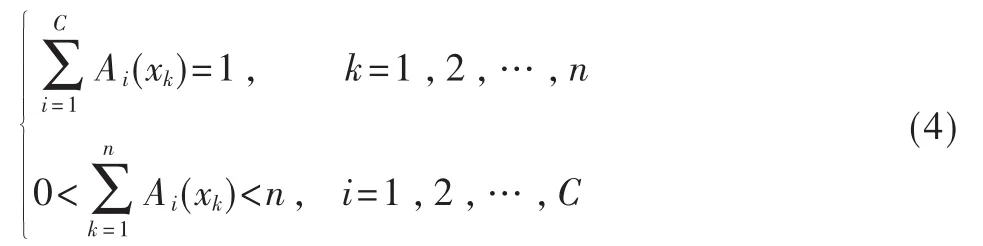
模糊聚类Ai的聚类中心记为:

其中,Vi∈RP,m为大于 1的实数。事实上,Vi是类Ai的隶属度的加权平均值。模糊C均值聚类算法使得数据点xk逼近一个或者多个聚类中心,即最小化下列公式:

使得:

其中:

由式(5)可知 Vi是A(xk)的函数,因此 Jm是 A(xk)与 Vi的泛函,泛函Jm的极小化过程是式(5)、式(6)的一个不断地迭代过程:给定初始值代入式(6),通过极小化 Jm求得(xk)(i=1,2,…,C;k=1,2,…,n),再把它们代入式(5),计算出后,再代入式(6)。不断地重复这一个过程,直到收敛[13]。
本文中具体使用的方法是:首先通过加权最邻近定位算法计算得到的未知点的未知坐标,然后采用模糊C均值聚类算法去除掉大量的跳变点。通过模糊C均值聚类算法把得到的数据分为若干类,将这些类中数据点最多的那一类留下,去除掉其他的数据。通过聚类后得到的数据更加接近真实点的坐标,从而提高了定位系统的定位精度。
3 实验结果分析
3.1实验布局
采用本文设计的 ZigBee室内定位系统进行实验,在实验区域内选取5.6 m×5.6 m的区域建立指纹数据库。在本实验中离线建库阶段一共采集了64个指纹点的数据。实验一共随机选取了21个待定点。离线建库阶段,在每个指纹数据点采集120 s信号强度值数据,然后对这120 s的数据进行均值滤波,得到指纹数据库;在线定位阶段,获取每一个待定点的30组数据,一共有21× 30=630组数据。
3.2实验结果
分别采用最邻近定位算法、加权最邻近定位算法、贝叶斯定位算法和模糊C均值定位算法对上述随机选取的21个采样点的数据进行计算,得到的定位结果如表1所示。
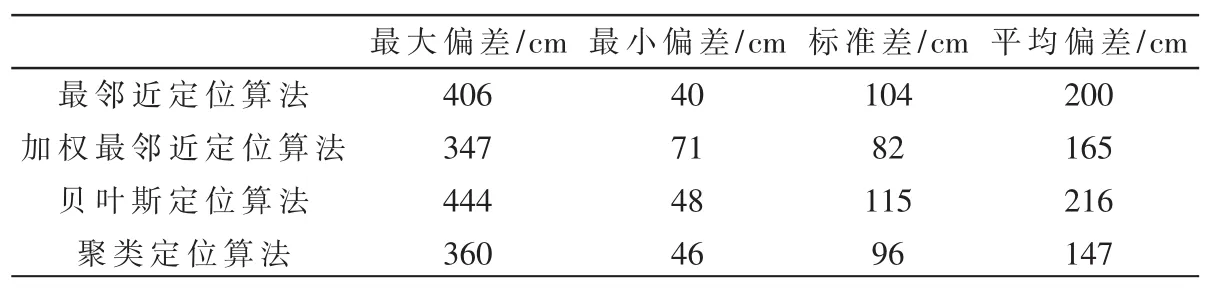
表1 4种定位算法的结果对比
使用本文提出的基于模糊C均值聚类定位算法处理了上述的21个采样点,各个点的定位误差如图2所示。在需要定位区域内,本文提出的模糊C均值聚类定位算法的平均定位精度达到了1.47 m。

图2 模糊C均值聚类算法定位结果
4 结束语
本文在研究了一般定位算法的基础上,提出了基于模糊聚类的加权最邻近定位算法,并把该算法应用在本文设计的ZigBee室内定位系统上。实验结果表明,采用本文提出的基于模糊聚类的加权最邻近定位算法后,ZigBee定位系统的平均定位精度能够达到 1.47 m,与普通的定位算法相比较,具有较好的应用价值。
[1]王晖.基于 RSSI的无线传感器网络室内定位算法设计与实现[D].北京:北京邮电大学,2010:16-41.
[2]肖竹,王勇超,田斌.超宽带定位研究与应用:回顾和展望[J].电子学报,2011,39(1):133-141.
[3]叶宝玉,王钦若,熊建斌,等.基于超声波的模型船舶室内定位系统研究[J].计算机工程,2012,38(19):258-260,265.
[4]HAUSCHILDT D,KIRCHHOF N.Improving indoor position estimation by combining active TDOA ultrasound and passive thermal infrared localization[C].IEEE Positioning Navigation and Communication,2011:94-99.
[5]张颖,李凯,王建伟.一种有源RFID局域定位系统设计[J].电子设计工程,2012,20(5):68-70,74.
[6]马卜林,杨帆.煤矿井下WiFi人员定位GIS系统设计与实现[J].西安科技大学学报,2012,32(3):301-305.
[7]李晓维,徐勇军,任丰原.无线传感器网络技术[M].北京:北京理工大学出版社,2007:191-219.
[8]张正勇,梅顺良.无线传感器网络节点自定位技术[J].计算机工程,2007,33(17):4-6.
[9]宋欣.多传感器融合的室内定位技术研究[D].上海:上海交通大学,2013.
[10]刘小康,张翔,方爽,等.基于ZigBee无线传感器网络的一种室内定位新方法[J].传感器与微系统,2013,32 (11):29-30.
[11]KING T,KOPF S,HAENSELMANN T,et al.A probabilistic indoor positioning system based on 802.11 and digital compasses[C].The First ACM International Workshop on Wireless Network Testbeds,Experimental Evaluation and Characterization.Los Angeles,USA,2006:34-40.
[12]宫改云.FCM算法参数研究及其应用[D].西安:西安电子科技大学,2014.
[13]黄竞伟,朱福喜,康立山.计算智能[M].北京:科学出版社,2010:214-218.
Research of ZigBee indoor positioning system based on the fuzzy clustering
He Haiping1,Guo Hang2,Fang Shuang1
(1.Information Engineer Institute,Nanchang University,Nanchang 330031,China;2.Institute of Apace Science and Technology,Nanchang University,Nanchang 330031,China)
With the development of the computer technology and sensor technology,location-based services gradually become a hot research topic.This paper uses the Texas instruments′CC2530 chip designing a set of ZigBee indoor positioning system,and proposes weighted the neighboring location algorithm based on fuzzy clustering.By using ZigBee indoor positioning system conducting experiment,the experimental results show that using the weighted neighboring location algorithm based on fuzzy clustering,ZigBee indoor positioning system positioning accuracy have improved,the average precision reached 1.47 m.And the positioning effect is compared with NN localization,the KNN algorithm and Bayesian algorithm.
indoor positioning systems;CC2530;fuzzy clustering;ZigBee;fingeprint localization algorithm;weithted adjacent algorithm;RSSI
TN961
A
10.16157/j.issn.0258-7998.2016.05.020
国家自然科学基金(41164001,41374039)
2016-01-27)
何海平(1992-),男,硕士研究生,主要研究方向:室内定位。
郭杭(1960-),男,教授,博士,主要研究方向:组合导航。
方爽(1988-),男,硕士研究生,主要研究方向:室内无线电定位及组合导航。
中文引用格式:何海平,郭杭,方爽.基于模糊聚类的 ZigBee室内定位系统设计[J].电子技术应用,2016,42(5):71-73,77.
英文引用格式:He Haiping,Guo Hang,Fang Shuang.Research of ZigBee indoor positioning system based on the fuzzy clustering[J]. Application of Electronic Technique,2016,42(5):71-73,77.
