Simulink在“机械原理”课程机构运动学分析中的应用
2016-11-29肖成龙吴宣
肖成龙+吴宣
摘 要:本文针对“机械原理”课程中机构运动学图解分析法的不足,提出了一种基于Simulink的机构运动学分析方法,并以四连杆机构的运动学分析为例,系统地采用该方法所包括的数学建模、求解和仿真等基本环节。经过长期实验观察,实际教学效果很好,说明采用该方法能明显提高在讲授相关章节时的教学效果,有利于学生分析问题、解决问题和创造性思维能力的锻炼与培养。
关键词:Simulink;“机械原理”;四连杆机构;运动特性
一、引言
“机械原理”课程是机械专业的一门重要的专业基础课,具有很强的工程性、实践性和应用性[1][2]。因此,在教学过程中,要着重对学生分析问题、解决问题和创造性思维能力进行培养,从而为社会主义现代化建设提供具有宽基础、高素质的机械工程技术人才。
机构的结构分析与设计、机构的运动学分析和机构的动力学分析是“机械原理”课程的三个最主要方面的学习内容。其中,机构的运动学分析是联系机构动力学分析和机构创新设计的桥梁,包括机构的位置分析、速度特性、加速度特性等方面。传统的“机械原理”课程教学在讲授机构运动学特性的分析方法时,主要以图解法为主,具有操作步骤复杂、计算精度低和较难理解等不足,在课堂上学生听起来枯燥乏味,缺乏学习兴趣,导致教学效率低下和教学效果不理想等现象;此外,在分析复杂机构的运动特性时,对现有机构进行改进设计或设计新的机构以使其满足预定的运动特性,图解法往往效率极其低下甚至难以起到作用。因此,在“机械原理”课程教学过程中仅仅对传统的图解法进行讲授将不利于学生分析问题和解决问题能力的提高以及创新思维的培养。
综上所述,针对“机械原理”课程中图解法的诸多不足,本文提出将计算机仿真软件Simulink用于分析“机械原理”课程中机构的运动学特性以克服图解法的不足。以四连杆机构的运动学特性分析为例,系统地讲述机构运动学数学模型的建立、求解和Simulink环境下的运动学仿真,使得学生们对机构运动学分析有个本质上的认识和把握。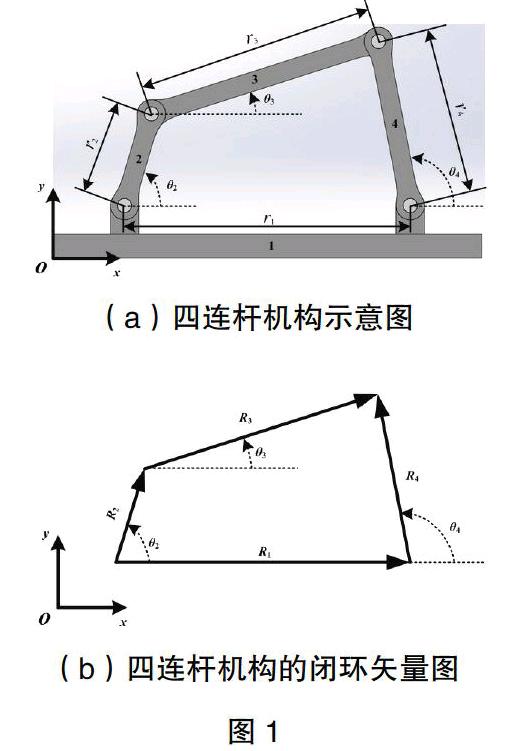
二、四连杆机构运动学数学模型的建立
图1(a)给出了典型的四连杆机构的示意图。r1、r2、r3和r4分别为机架1、主动杆件2、连杆3和从动杆件4的长度;θ2、θ3和θ4分别为t时刻主动杆件2、连杆3和从动杆件4与x轴的夹角。假设主动杆件2以恒定的角速度ω2旋转,试分析连杆3和从动杆件4的运动学特性,即确定任意时刻3和4的位置、角速度和角加速度。
为建立四连杆机构的运动学数学模型,本文采用平面矢量方法,如图1(b)所示。具体地,机构中的每一根杆件用一个位移矢量来表示,如图1(b)中的R1、R2、R3和R4所示),矢量的起点就是杆件的某一端点,而其另一端点为矢量的终点。根据矢量的性质,显然有如下关系成立:
以上为对四连杆机构的运动学分析所进行的数学建模,下面将详细阐述基于Simulink的数学模型求解及运动学仿真。
三、基于Simulink的四连杆机构运动学仿真
采用Simulink对机构的运动学特性进行仿真,大致可分三个步骤进行:首先,确定已知量和未知量,并根据他们之间的关系在Simulink环境下建立仿真框图;然后,设置仿真框图中各积分环节的初始条件;最后,进行仿真,处理数据并分析结果。
对本文所分析的四连杆机构,由式(2)~(5)可知,已知量包括:r1,r2,r3,r4和ω2,未知量包括:ω3,ω4,θ2, θ3,θ4,α3和α4。根据已知量和未知量之间的关系可建立如图2所示的仿真框图,其中Mechanical.m为Matlab函数,用于式(5)的计算。本文中假设r1=120 cm,r2=40 cm,r3=100 cm,r4=70 cm,ω2=250rad/s,则Mechanical.m函数的代码如下: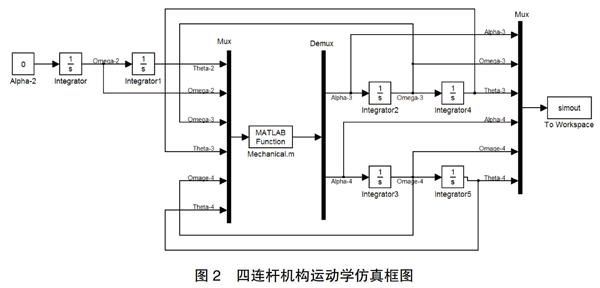
假设初始时刻θ2=0 rad,则通过计算式(2)和(3)可获得初始时刻θ3和θ4的值,分别为0.7688 rad 和1.6871 rad;通过计算式(4)可获得初始时刻ω3和ω4的值,均为125 rad/s。因此,得到一组满足相容条件的仿真初始值,并用于框图中各对应积分器的初始值设置。
运行Simulink进行仿真,便可得到机构的运动学特性曲线,如图3所示。
利用上述获得的曲线可方便地分析和评估机构的运动学特性,还可用于对机构进行改进或创新设计等。
四、教学效果
为验证本文所提出的这种方法在实际教学中的效果,笔者在教授“机械原理”机构运动学章节时,分别对传统的图解法和本文所提出的该方法进行了讲授。从学生所反馈的结果(包括口述的感想、课程作业和课程设计)来看,该方法具有明显的效果,学生普遍反映能从本质上很好地理解和把握机构的运动原理,有相当部分学生能够顺利将此方法推广运用到其他机构(包括曲柄滑块机构、间歇机构等)的运动学甚至动力学分析中。因此,达到了培养、锻炼和提高学生分析问题、解决问题和创造性思维能力的目的。
五、结论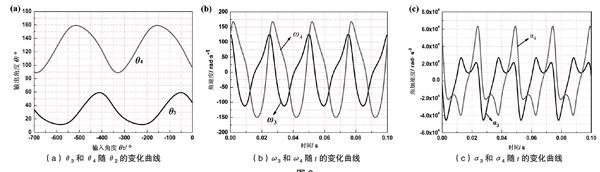
本文提出了一种基于Simulink的机构运动学特性分析方法,并在实际的教学过程中进行了实施。结果表明:与常规的图解法相比,该方法操作步骤简单、效率和计算精度较高和容易理解,有利于学生从本质上把握机构运动的基本原理,对提高本科生分析问题、解决问题和创造性思维能力有明显帮助。
参考文献:
[1]郭卫东,刘 荣,李继婷,等.机械原理课程体系与教学内容的改革与实践[J].太原理工大学学报(社会科学版),2008(S1),26:7-10.
[2]孙志宏,单洪波,庄幼敏,等.提高学生创新能力改革机械原理课程设计[J].实验室研究与探索,2007,26(11):98-99.
