智能餐厅服务机器人系统的设计与实现*
2016-11-29谭等泰
谭等泰
(甘肃政法学院公安技术学院,甘肃 兰州 730070)
智能餐厅服务机器人系统的设计与实现*
谭等泰
(甘肃政法学院公安技术学院,甘肃 兰州 730070)
随着科学技术的高速发展,机器人正逐步走进人们的生活。分析了现有餐厅服务机器人的优缺点后,设计了一种多功能智能化的餐厅服务机器人,采用STM32作为机器人的核心控制器,完成机器人的循迹、语音播报和红外避障等控制功能,同时决策多个机器人的运动位置和路径,达到机器人送餐的快速性和准确性。经模型测试,该餐厅服务机器人具有操作简单、稳定、成本低、实用性强等特点,具有广阔的发展空间。
餐厅服务;循迹;语音播报;红外避障
随着机器人技术的发展,机器人已经广泛应用在生活的各个方面,目前常见的机器人有家庭服务机器人、助老助残机器人、农业机器人、工业机器人和安防机器人等。但是绝大多数服务机器人技术水平尚未成熟,与实际应用有一定距离。国内在服务机器人研究领域起步较晚,与日本、美国等发达国家存在较大差距,由于服务机器人产业潜在的价值,我国也加强了在服务机器人领域的研究。餐厅服务机器人属于服务机器人的一个种类,它主要是为现代化的餐厅提供送餐、点餐等功能[1]。
当下我国机器人的应用十分广泛并且种类繁多,形式多样,而应用于餐饮行业的机器人相对较少[2]。由于劳动力成本的提高,餐厅服务人员的人力成本支出越来越高,如在日本、香港,普通服务员的工资和产业工人的工资已经不相上下。如果使用机器人代替部分服务员为顾客服务,如点菜、送餐,不但能提高服务效率,减少服务人员的数量,更能建立餐厅特色,打造餐厅品牌,进而降低劳动力成本[3]。餐厅服务机器人作为一类特殊的公共服务机器人,是一套具有自主性、适应性和交互性的综合系统,集成了移动机器人技术、多任务集成、人机交互、多模态分析、路径规划等技术。因此,研究和开发餐厅服务机器人系统,具有十分重要的意义和推广应用价值[4]。
本文设计了餐厅服务机器人的运动控制系统和软件系统,模拟完成人类服务员的各项工作流程,并且对多个机器人的运动状态进行控制,完成路径规划,实现机器人送餐路径最短,多机器人的相互协作,达到送餐的快速性和准确性。
1 系统概述
餐厅服务机器人的总体设计框图如图1所示。采用模块化的设计原则,将该服务机器人分为五个模块:STM32控制器、传感器模块、语音模块、运动控制模块、电源模块。其中传感器模块包括红外避障模块、灰度传感器模块、压力传感器模块。系统采用STM32单片机作为核心控制器,采用灰度传感器循迹,红外避障传感器检测行人,语音模块播报日常用语,步进电机及驱动模块作为动力,同时实现对智能机器人的速度、位置、运行状况的实时控制。系统设计了一个电源开关、一个模式开关、一个返
回键、垃圾回收桶和送餐托盘等,压力传感器安装在托盘上。
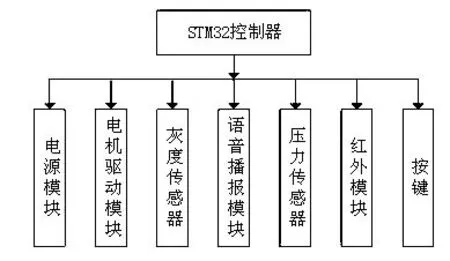
图1 系统结构图
2 各模块的算法设计与实现
2.1 循迹传感器的设计
循迹传感器设计中,灰度传感器原理图如图2所示。
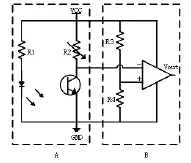
图2 灰度传感器原理图
灰度传感器是一种模拟传感器,由一只发光二极管、一只光敏三极管、一只限流电阻和一直可调滑动变阻器构成,如图2(A)所示。由于检测面对光的反射强度不同,通过光线控制光敏三极管基极的截止和导通,就可以检测此光线的强度并将其转换为电平信号。如果地面上贴有白色引导线,在白色引导线和检测面上的返回值差别比较大,在白线上应输出应接近0V,在检测面上应接近5V,由于在复杂的环境下光线容易受外界的干扰,电平在引导线和检测面上会变化比较大,无法达到理论要求,为此引入电压比较器,如图2(B)所示,调节基准电压来稳定的区分输入的电平信号,相当于模拟信号数字化。基准电压如1式所示。

灰度传感器循迹时,采用一字型布局的分布方式。一字型布局又分为同一直线上非均匀分布和均匀分布两种方式[5]。均匀排布型设计简单但不利于对弯道信息的采集。而非均匀排布恰好克服了这一缺点,非均匀排布采用等角原则,即在传感器垂直平分线上方处某点引射线与传感器相交,射线之间夹角相等,交点为传感器的分布点。如图3所示。
由于餐厅服务机器人的路径是自行设计的,经过测试两种设计方案的循迹效果差别很小。所以本设计将7个灰度传感器并联构成一排循迹,在机器人的前面和后面分别安装一组,分别用于前进循迹和后退循迹。
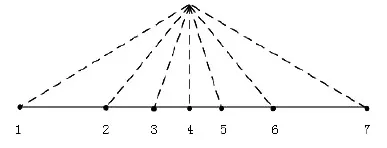
图3 非对称分布型传感器
2.2 红外避障传感器的选择
避障传感器的基本原理是利用物体的反射性质。即发出一束红外光,如果没有障碍物遮挡,红外线随着传播距离的增加而衰减,而传播过程中遇到障碍物,红外线将被反射回避障传感器的的接受头,根据这个信号确定障碍物的距离。本设计选择E18-D80NK红外避障传感器主要是该传感器具有探测距离远、受可见光干扰小、价格便宜、易于装配、使用方便等特点。如图4所示为E18-D80NK红外避障传感器的管脚连接图,有三个引脚依次为电源(红)、地线(黑)和信号线(黄)。
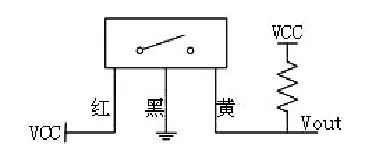
图4 避障传感器连接图
2.3 压力传感器的选择
压力传感器选用单片机称重AD模块HX711,采用24位高精度的A/D转换器芯片hx711,具有两路模拟通道输入,内部集成128倍增益可编程放大器,是一款理想的高精度、低成本采样前端模块[6]。本设计将输入电路配置为提供桥压的电桥模式。压力传感器的电路图如图5所示。
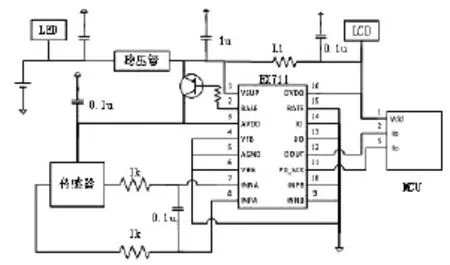
图5 压力传感器原理图
2.4 语音模块的选择
语音播报模块选用MXH040芯片。它可播放语音时间长,最长可达80s,存放语音文件数量大,支持播放不同采样率的语音文件[7],具有多种可选择的控制模式等。在本设计中主要采用按键控制模式,并通过STM32单片机的P2口来触发语音播报。当机器人送餐过程中遇到障碍物时语音播报芯片提示“请您让一下路,谢谢”。 当机器人到达指定餐桌时,语音模块播报“您的餐已送到,请您用餐,谢谢”。当压力传感器检测到压力为零之后,语音模块播报“请您收拾一下餐桌上的空盘,拜拜,谢谢”,这时机器人自主按原路返回,完成一次送餐。硬件电路如图6所示。
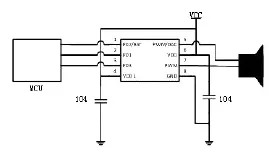
图6 语音模块原理图
3 软件系统设计
测试过程中餐桌位置及循迹线如图7所示,送餐机器人沿着设定的路线循迹,设定好餐桌号后机器人会选择相应的位置送餐。
系统软件流程图如图8所示,启动后,当服务员放好餐后,设置目的地餐桌号,首先判断奇数餐桌号还是偶数餐桌号,若检测到奇数餐桌号,则左侧传感器(1号传感器)检测路口并使COUNT1计数器加一,判断COUNT1是否等于餐桌号,若相等转弯并循迹,当1号和7号传感器同时检测到白线时,停止并送餐;若检测到偶数餐桌号,则右侧传感器(7号传感器)检测路口并使COUNT2计数器加一,判断COUNT2是否等于餐桌号,若相等转弯并循迹,当1号和7号传感器同时检测到白线时,停止并送餐。
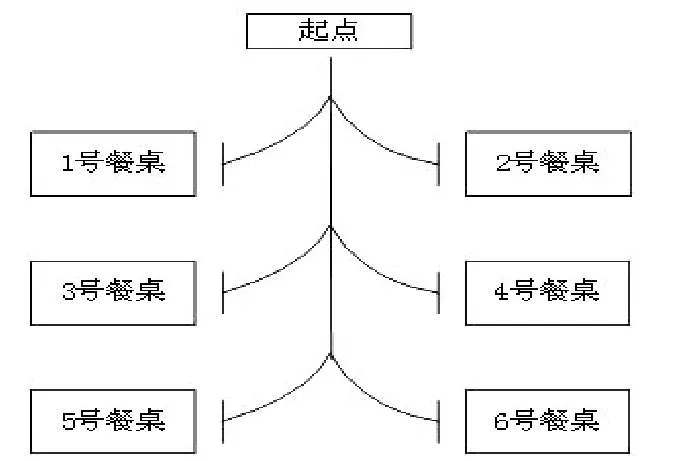
图7 餐桌布置示意图

图8 系统软件流程图
4 结语
经过模型测试,餐厅智能服务机器人实现了预期的功能,能够稳定的沿着设定的白线循迹,当遇到前方有人通过时,机器人会自动语音提示,同时能够准确的检测到设定的餐桌号,到达目的地后,自动提示顾客取餐,当压力传感器检测到为0时,会自动按原返回。餐厅服务机器人模拟完成人类服务员的各项工作流程,实现多个机器人协作之间不发生碰撞,做到了送餐的快速性和准确性。
[1] 胡振旺.基于STM32的家庭服务机器人系统设计[D].广州:广州工业大学,2015:1-69.
[2] 于清晓.轮式餐厅服务机器人移动定位技术研究[D].上海:上海交通大学,2013:1-40.
[3] 陈钰键.智能服务机器人软件系统设计[D].沈阳:东北大学,2011:1-30.
[4] 摆玉龙,杨利君,董存辉.基于MC9S128的电磁导航智能车的设计与实现[J].测控技术,2011,30(11):59-64.
[5] 宫纪波.基于红外反射循迹小车的传感器布局研究[J].工业控制计算机,2009,22(8):97-98.
[6] 苏杰仁,张立程,院莲.寻轨式语音播报送餐机器人系统的软硬件设计[J].单片机与嵌入式系统应用,2015,8:59-62.
[7] 李琳,王茂海.基于AT89C2051单片机和WT588D-U语音模块的语音报价系统设计[J].科技信息,2015,15:525-526.
TP242.3
甘肃政法学院科研资助项(编号GZF2014XQNLW03)。