无人船水下测量系统及水下测量实验分析
2016-11-28陈立波罗正龙汪嵩
陈立波,罗正龙,汪嵩
(宁波市测绘设计研究院,浙江 宁波 315042)
无人船水下测量系统及水下测量实验分析
陈立波*,罗正龙,汪嵩
(宁波市测绘设计研究院,浙江 宁波 315042)
针对水下测量较之于常规陆地测量存在诸多困难的情况,本文采用基于GPS测量技术的无人船测量系统进行水下测量,主要介绍了无人船测量系统的功能,水深测量和水下地形测绘的原理。通过对该设备的应用和测量实验结果的分析,表明该技术具有高度无人化、自动化和智能化,能有效提高水下测量效率。获取的水下地形数据精度较高,同时保障了测量人员的人身安全,具有较好的水下测量应用前景。
GPS测量;无人船测量系统;水深测量;水下地形测绘
1 引 言
水下测量[1]根据测区类型可以分为海洋测量和内陆水域测量[2],无论以上哪一种测量,水下测量都存在陆上测量难以克服的困难。首先是被测对象不可见,其次是水面的不稳定性,这些都导致水下测量误差较常规陆上测量大,甚至是测不准。水下测量通常采用的方法是通过船只从水面测量水下地形地貌;为了克服水面的不稳定性,也有涉水测量的方法,但是无论是船只或涉水测量,人员的风险性都较大。基于以上原因,本文采用了无人船测量系统进行水下测量。它集成了卫星定位、无人船智能导航控制、实时通讯等众多先进技术,提供了高精度、智能化、无人化、集成化、机动化、网络化的水下测量解决方案,有效提高了水下测量的数学精度,同时减少了工作人员的涉水风险。
2 无人船水下测量系统
2.1 系统组成及其功能
无人船水下测量系统由无人船平台、自动导航模块[3]、声呐探测模块、GPS定位模块、外围传感模块、岸基操控终端、无人船专用软件等组成(如图1所示)。其主要测量原理是声呐测深和GPS定位相结合[4,5],从而测定水下特征点的平面坐标和高程。该系统同时还具备以下功能:
(1)具备自主导航功能。该无人船体内安装了一枚智能芯片,可以根据上传的航线坐标信息与GPS实时动态获取的坐标信息进行比对,实时调整无人船航向,实现了无人船的自动航行,航线追踪能力强。
(2)具备智能避障功能(如图2所示)。在无人船体靠前的位置安装了两个摄像头和距离传感器,无人船航行途中,操作人员能在岸上的监视器上实时查看无人船前方的情况,前方一旦遇到障碍物,距离传感器能实时把距离信息传送给智能芯片,后者根据设定的安全距离实现智能避障,不需要人工操作,大大提高了无人船自主航行的安全性。

图1 无人船测量系统示意图
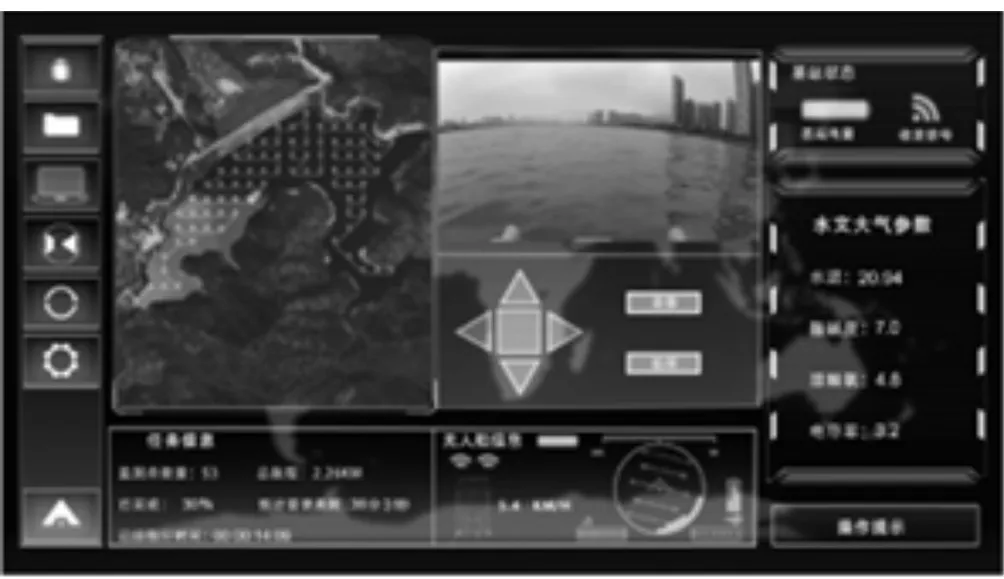
图2 无人船障碍物探测避让及仪器操作界面
(3)具备实时通信功能。本系统配备了高性能数据传输模块和实时图传模块,实现了船岸数据的实时通讯。船岸数据能实现 10 km范围内的点对点射频通讯。船上的摄像设备和数据获取设备能实时把数据传到岸上的工作站,同时岸上的工作站根据需要可以实时发送无人船操作指令,实时调整船只航行轨迹。
(4)具备平稳、持久的航行能力。该无人船硬件系统也作了一些相应改进,比如把常规的单体设计改造成了三体设计,使得无人船重心更加低,抗风浪能力更加强,船只运行更加平稳。另外提供了高容量锂聚合物电池,可靠性和供电能力大大加强,单块电池能连续工作 1 h,有效提高了野外工作效率。
2.2 系统测量原理
系统主要集成了GPS设备[6~8]、声呐设备[9]和无人船设备(图3)。其测量原理如下:当声呐测定水下O1点深度h1的时候,装载在船上的GPS设备同时测得船表面O4点的平面坐标X、Y和高程值H(O1、O2、O3和O4在同一竖直轴线上)。那么水底O1点的高程值H1可以通过式(1)计算获得。

图3 无人船测量原理示意图
H1=H-h1-h2-h3
(1)
其中h2和h3是已知参数。而O1和O4的平面坐标一致,为X和Y,这样我们就获得了水底O1点的三维坐标。
由于水面风浪的影响,系统可能存在一定的测量误差,误差主要是由船的前后和左右倾斜造成。如图4所示,假定此时无人船测量系统测定的O1点的三维坐标为(X、Y、Z),而X,Y其实为O8点的平面位置,另外由式1可知,Z≠H1,因此此时O1点的三维坐标都偏离了真实值,即产生了误差。本文的设备具有一定的倾斜补偿功能,但是也仅仅适用于小角度,如果风浪较大,测量误差将增大,这种误差将会随着水深而变大,甚至超限,这在使用过程中需要注意。

图4 无人船测量误差原理示意图
以上是单波束声呐的情况,该情况下获取的水底地形数据较为离散,为获取更加密集的地形数据,需要加密航线。当然,可以根据实际需要把单波束声呐更换成多波束声呐或侧扫声呐,这样就能提高单航线下的工作效率,但是同时带来数据转换和处理的困难。本文试验所用的设备为单波束声呐,因此不对其他情况展开讨论。
3 水下测量试验
3.1 数据采集
本次试验地点选在了一处面积约为 3 500 m2的开阔鱼塘。测量当天水面平静,水面风浪对测量精度的影响基本可以忽略。数据采集过程中分别试验了手动遥控和自动航行两种模式(如图5所示),无人船运行约 40 min,共采集水底特征点 1 000多个。

图5 无人船测量工作照
从众多数据中随机挑选出50个位于鱼塘中间的特征点,等鱼塘排完水,对这50个点位进行人工放样,并测量其高程值。
通过数据采集,我们获取了试验鱼塘水底50个特征点位的两套高程值。
3.2 结果分析
假定人工测量的高程值是真实值,我们把无人船测量系统获取的高程值与其进行比较,从而评定无人船测量系统的测量精度。两套数据的空间分布情况如图6所示,蓝色点表示无人船测量高程,黑色表示人工测量高程,红线表示鱼塘范围。两套高程值具体如表1所示,Z1表示无人船测量高程,Z2表示人工测量高程。

图6 无人船测量高程与人工测量高程比对图
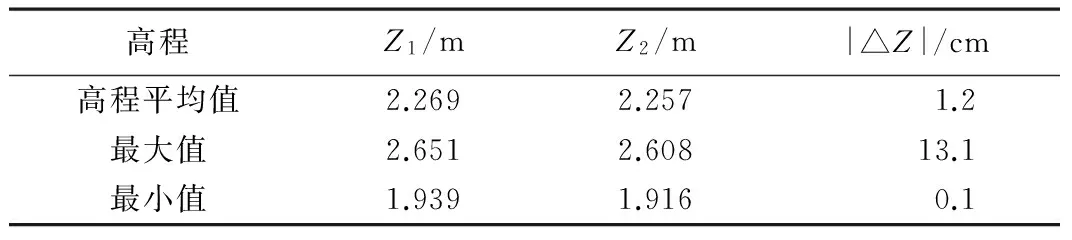
Z1及Z2数据相关统计 表2
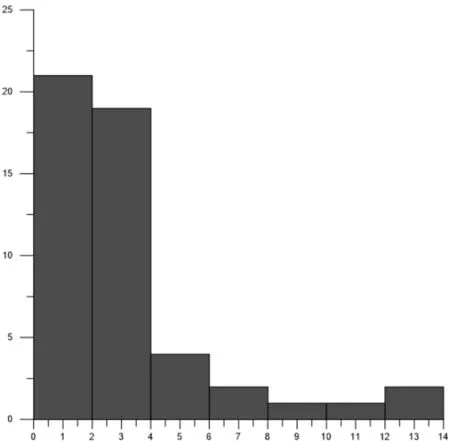
图7 |△Z|分布直方图
由表1、表2及图7可知,△Z高程值大于零的个数为26个,小于零的个数为24个,基本成正态分布。无人船测量高程Z1和人工测量高程Z2平均值差值的绝对值为 1.2 cm,表明无人船测量数据整体精度较高。最大高差的绝对值为 13.1 cm,最小差值的绝对值为 0.1 cm,差值绝对值小于 4 cm的数据个数占总数的80%,表明无人船测量数据的稳定性强。假定以 ±10 cm作为无人船测量中误差,超过2倍中误差为粗差,则仅有3个点超过中误差,粗差个数为0,表明无人船测量数据的个体精度也较高。综上分析,无人船测量数据精度高,稳定性强。
3.3 注意问题
经过本次试验,也发现无人船使用过程中的几个问题,应予以注意:
(1)本次测试水域面积较小,由于无人船存在一定的转弯半径,自动巡航功能的优势很难发挥。由此也可以展望,无人船在较大的水域开展工作,效率将有所提高。
(2)无人船装备的声呐存在测深死角(水深<40 cm)。鱼塘靠近岸边的部分由于水深太小,无法用无人船测量,需人工补测。
(3)本系统采用的单波束声呐不具备穿透能力,遇到水中有较大悬浮物会产生噪点数据,遇到水底有大面积水草的情形测量成果很难反映水底地形。
4 结 语
本次试验采用无人船测量系统对鱼塘水底高程进行测量,通过无人船测量高程与排水后人工测量高程、土方量[10,11]比对,表明无人船测量数据精度高、稳定性强。另外,无人船测量系统的自动化、智能化技术提升了作业效率,同时有效保障了作业人员的人身安全,具有很好的工程测量应用价值。本次测量试验所在鱼塘水深浅,地形缓、波浪小,试验条件较为理想,不能综合反映该设备在大型湖泊、河流等水情条件较为复杂情况下的表现。下一步将在复杂水情开展测试工作,并将搭配不同的传感器,进行水质监测[12,13]、水库库容测量[14]等测试。
[1] 金久才,张 杰,马毅等. 一种无人船水深测量系统及试验[J]. 海洋测绘,2013,33(2):53~56.
[2] 黄国良,徐恒,熊 波等. 内河无人航道测量船系统设计[J]. 水运工程,2016(1):162~168.
[3] 耿以才,黄立新,陈凌珊等. 无人船安全目标追踪与自动避障算法[J]. 计算机测量与控制,2015,23(7):2467~2474.
[4] 吴敬文,沈理,汪明海. 基于GPS动态测量技术进行测船动吃水测定的方法研究[J]. 测绘通报,2012(S1):695~697.[5] 刘文勇,江林,钱立兵等. 超短基线水下定位校准方法的探讨与分析[J]. 测绘通报,2011(1):82~84,93.
[6] 佘继红,李文林,吉建兵. 利用网络RTK进行水下地形测量的方法探讨[J]. 现代测绘,2010,33(4):26~27.
[7] 何书镜. 基于CORS的网络RTK技术在水下测绘中的应用[J]. 海洋测绘,2011,31(6):69~71,79.
[8] 殷海峰. GPS在水下地形测量中的研究与应用[D]. 北京:清华大学,2009.
[9] 程剑刚. 网络RTK联合声波测深仪在水下地形测量中的应用[J]. 测绘工程,2014(3):63~65.
[10] 张红亮,胡波,蔡元波. GPS-RTK技术在土方测量中的应用[J]. 城市勘测,2008(5):83~85.
[11] 季朝亮,李宗聚,马学民. 关于几种土方量计算方法的研究[J]. 测绘与空间地理信息,2010,33(3):219~222,226.
[12] 金久才,张杰,邵峰等. 一种海洋环境监测无人船系统及其海洋应用[J]. 海岸工程,2015,34(3):87~92.
[13] 刘星桥,陈海磊,朱成云. 基于GPS的自学习导航游弋式水质监测系统设计[J]. 农业工程学报,2016,32(1):84~90.
[14] 程剑刚. 网络RTK技术联合数字测深仪在湖泊库容测量中的应用[D]. 北京:中国地质大学(北京),2014.
The Research on Surveying and Mapping of Underwater by Unmanned Ship
Chen Libo,Luo Zhenglong,Wang Song
(Ningbo Institute of Surveying and Mapping,Ningbo 315042,China)
Because it’s much more difficult for mapping and surveying underwater than on ground,the unmanned ship system based on GPS measurement technology had been used in this research. This paper mainly introduces the functions of the system,the principle of water-depth measurement and topographic mapping underwater. Through the application of this equipment,it is found that the technology is highly unmanned,automatic and intelligent,it can improve the efficiency of underwater measurement and ensure the safety of people. The analysis of the data shows that the underwater terrain data got by this technique is highly accuracy,so it has a good prospect in underwater measurement.
GPS;unmanned ship system;water-depth measurement;underwater measurement
1672-8262(2016)05-151-04
P229.5,P258
B
2016—05—12
陈立波(1983—),男,工程师,主要从事工程测绘和摄影测量与遥感。
