移动激光扫描测量系统在海岛海岸带测量中的应用
2016-11-28徐良沈蔚王林振
徐良,沈蔚,王林振
(1.常州市测绘院,江苏 常州 213003; 2.上海海洋大学海洋科学学院,上海 201306)
移动激光扫描测量系统在海岛海岸带测量中的应用
徐良1*,沈蔚2,王林振2
(1.常州市测绘院,江苏 常州 213003; 2.上海海洋大学海洋科学学院,上海 201306)
以海岛海岸带为研究对象,对移动激光扫描测量系统的原理、组成、优势和关键技术进行了分析,对机载和船载移动激光扫描测量在海岛海岸带测量中的技术流程、应用方法及注意事项进行了探讨,并对其当前的发展进行了初步总结,对其未来良好的应用前景进行了展望。
移动激光扫描测量系统;机载;船载;海岛海岸带测量
1 前 言
海岛通常是指海洋中四面环海水并在高潮时高于海面的面积不小于 500 m2的小块陆地,我国是海洋大国,海岛众多,数量多达6 500个以上,总面积为 6 600多平方千米,根据海岛不同的属性,可将其分为大陆岛、列岛、群岛、陆连岛、特大岛等[1]。
海岛是我国海洋经济发展的重要依托,随着海岛开发利用活动的增加,海岛经济对国民经济的总体贡献不断攀升。但随之出现的环境问题也日益增多,因此保护海洋环境是维护国家海洋权益,保障海洋生态平衡是我们的首要任务,为此,国家相继发布《海岛保护法》和《全国海岛保护规划》,为保护海岛生态环境,维持海岛生态系统平衡,合理开发海岛资源,促进海岛地区经济社会可持续发展提供法律保障。我国虽有 6 500多个海岛,但只有6%的海岛有人居住,绝大多数海岛面积狭小、地形复杂、交通不便,利用常规测量方法,通常难以登岛测量,且受海岛复杂恶劣地形的限制,人员装备通常难以登岛开展工作。
海岸带是人类工程活动和经济发展的主要区域,是重要生态资源和后备土地资源。通常指每天受潮汐涨落海水影响的潮间带(滩涂)及其两侧一定范围的陆地和浅海的海陆过渡地带,为在海陆之间相互作用的地带。其中,滩涂海岸面积大、分布集中且区位条件好,农牧渔业综合开发潜力大,是海岸带资源与环境保护的重要对象。因此,测量滩涂的地形和范围,为其合理开发、最大限度地利用和保护,准确掌握滩涂海岸的现状和变迁具有重要意义[2]。
滩涂水下地形测量范围涉及潮上带、潮间带和潮下带三大块区域。
潮上带(高滩)是指大潮期最高潮位以上的区域,由于潮上带的区域高程相对较高,因此常年露出水面,一般情况常采用全站仪、GPS等方法进行测量工作。该区域地面芦苇杂草众多,或淤泥质海滩,人和车难以通行。
潮间带是指海水从涨到最高点时所淹没的地方到潮水退至最低点时露出水面的范围,也就是最高潮位和大潮期的最低潮位间的区域。在这一特殊地带,高潮位时水深较浅,测量船只吃水受到限制,水下测量难以实现;低潮时露出淤泥滩面,人和车难以在其上开展测量。 因此,广大的淤泥潮间带滩涂是测量最困难区域,目前无有效的测量手段。
潮下带地形测量目前主要采用信标GPS接收机和单波束测深仪,结合验潮站水位改正数据进行测量,存在效率低下,水浅处船只无法到达的问题[3]。
常规的三角测量、导线测量、水准测量、GPS测量等地形测量手段,难以在潮涨潮落淤泥质的滩涂地上开展。传统摄影测量在进行滩涂测量时,外业较难布设像控点,且因为滩涂纹理单一、坡度平缓等原因,内业较难进行影像匹配,难以高效的获取高精度的滩涂DEM数据。[2]
面对滩涂这一特殊地形测量的难题,急需一种高效而又准确的测量技术,而近年出现的移动激光扫描测量系统,随着精度和性能的提高,成本的降低,为这一难题提供了有效的破解手段。
2 移动激光扫描测量系统
2.1 原理及技术关键
移动激光三维测量系统可以非常便捷安装在汽车、飞机、船舶等其他移动载体上,它是将三维激光扫描设备(SCANNER)、卫星定位模块(GNSS)、惯性测量装置(IMU)、360°全景相机、总成控制模块和高性能板卡计算机高度集成然后封装在刚性平台之中,利用载体的移动,高校、快速、便捷地快速获取高精度定位定姿数据、高密度三维点云和高清连续全景影像数据[4]。移动激光扫描测量的关键技术主要有:
(1)GPS、IMU、SCANNER的集成与检校
移动激光扫描测量系统由GPS、POS、激光系统组成,每个分系统的测量精度与频率、不同分系统的时间同步、空间同步都决定了最终点云的测量精度。
移动激光扫描测量的关键技术之一就是对系统的精度校准,通常需要在机场附近设计必要的合适的校准场,并采用RTK-GPS对校准场进行必要的控制测量,且每飞行架次的起始段和结束段都会通过校准场,从而保证LiDAR系统精准可靠地获取地面高程数据。
(2)连续高精度定位服务
连续的高精度定位服务,可通过单基站RTK实现,也可通过CORS网络实现,根据观测范围和实际条件决定。高精度的定位数据,是移动激光测量精度的保证,通常也是事后解算高精度姿态数据的关键。
(3)似大地水准面成果(GEOID)数据的引用与外推[5]
利用移动激光扫描系统测绘符合标准的测绘产品,前提是必须进行水准测量。目前,最有效快捷的方法就是利用测绘区域内已有的精确大地水准面成果(GEOIO)。但是全国各地绝大多数地区精确大地水准面成果(GEOIO)匮乏,故需要对已有的大地水准面成果进行外推,外推数据经过实地水准测量检验或者第三方检测后方可用于测绘实践工作。
(4)高效的LiDAR数据处理算法
一系列高效稳定的数据处理算法,是移动激光测量实用化的关键。首先,需要开发高效准确的目标分类与自动提取算法,快速分类出滩涂海岸或海岛等不同地物的点云数据;其次需要利用多种滤波算法,过滤非地形点,获得滩涂地形数据;最后对于不完整的激光点云进行空间插值,获得完整真实的DEM也是研究的热点之一。
2.2 海岛海岸带测量中优势
移动激光扫描测量相对传统测量方法具有巨大优势:首先,对芦苇等植被具有一定的穿透能力,尤其适合人车无法到达的生长了大量芦苇和低矮植被的滩涂海岸的地形测量,在海岛滩涂等恶劣地形区域,移动激光扫描测量可高效地获取三维表面数据;其次,可实现对复杂海岸的全覆盖测量、内外业效率高,移动激光扫描可在保证较高密度点云条件下,通常机载LiDAR每小时可采集 100 km2~200 km2滩涂海岸数据。随着国内外处理软件的日益成熟,其数据处理自动化程度越来越大高,在少量人工干预下,可快速生成所测区域的DEM 和DOM,号称是“隔夜”任务。第三,测量精度高、点云密度大。在高精度POS系统的支持下,移动LiDAR数据的平面和高程精度均可达到 10 cm;根据激光扫描频率、扫描视场角、载体移动速度和测量距离,每平方米海岸实测高程点可达数个至数十个。 第四,受时间、天气影响小。为了获取较大面积的滩涂数据,普通航飞需要在较低潮位进行( 可航飞低潮位一般为 1 h~3 h) 。而移动激光是一种主动式测量,可穿透一定的云雾,可在夜间进行航摄,大大增加了可测量时间。最后,移动激光扫描的三维数据结合全景影像,可用于海岛海岸地形测绘、监测海岸变化及动态侵蚀情况,进行洪水淹没分析、灾害预警和灾害评估等。
2.3 海岛海岸测量技术流程
移动扫描系统海岛海岸测量技术流程如图1所示。

图1 移动LiDAR扫描测量流程图
3 机载LiDAR海岛海岸三维地形测量
机载LiDAR技术是利用返回的激光脉冲获取探测目标高分辨率的距离、坡度、粗糙度和反射率等信息,采集的数据一般包括激光点云数据、定位定向数据等,数据处理流程如图2所示。
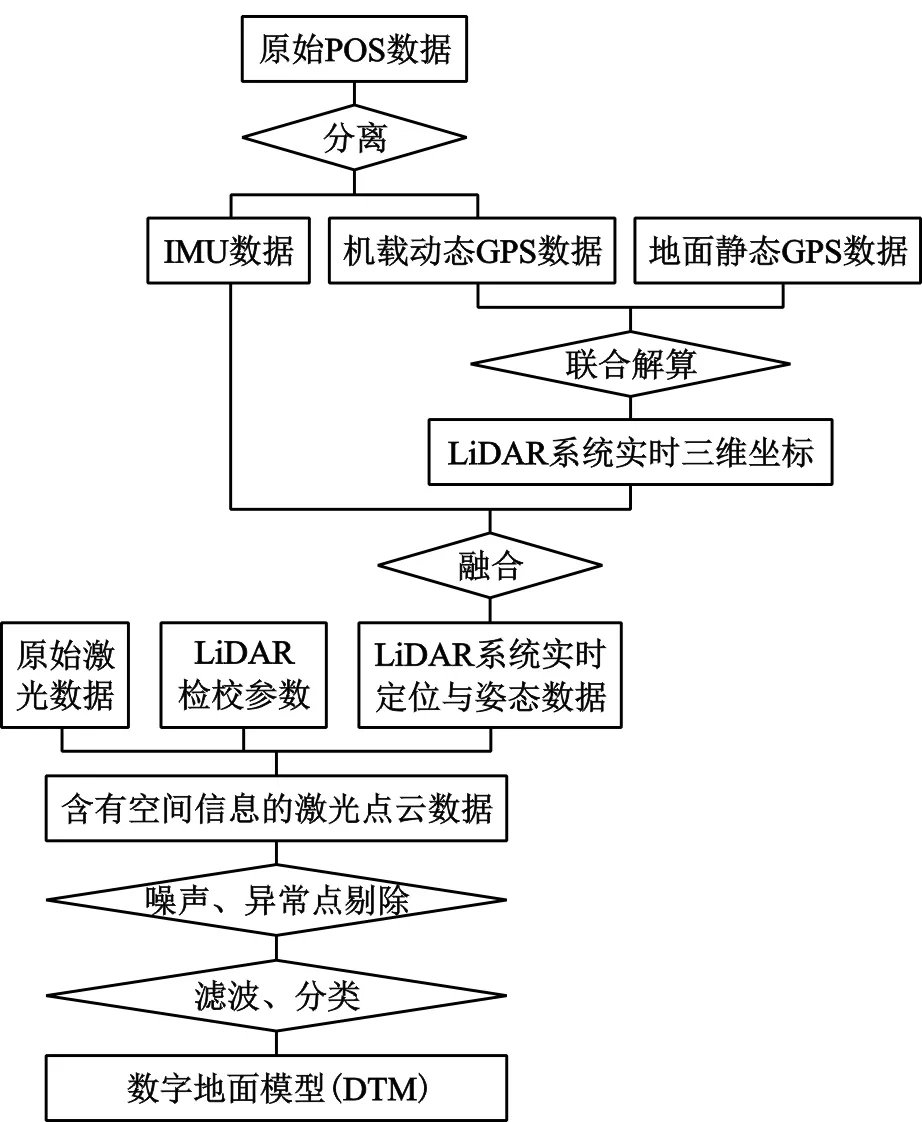
图2 数据处理流程图
传统的海(岛)岸线人工测量和遥感摄影测量,都需要人工勾绘岸线,无法进行快速的自动化海岸线绘制[6]。基于机载LiDAR点云数据和平均大潮高潮面,可快速提取海(岛)岸线;基于三维的LiDAR点云可快速生成海岛海岸带的DSM和DEM。利用机载LiDAR数据,可自动化提取海(岛)岸线和DEM,无需高分辨率影像,大大缩短DLG、DOM、DEM等数字化测绘产品的生产周期,如图3所示。
4 船载LiDAR海岛海岸三维地形测量
传统的海岛海岸测绘工作,需要人工登岛测量,工作环境艰苦,且受环境影响限制较大,通常伴有一定的危险性。利用船载LiDAR激光扫描,对海岛海岸进行远距离(根据激光器的性能,可达 2 km以上)非接触的测量,则可避免传统测量的缺陷,还可以获得传统测量无法获取的小地物高密度点云数据,为三维建模和空间分析提供高质量的三维数据保障。此外,船载LiDAR激光扫描相对于机载LiDAR成本低,且对船只和设备要求较低,易于操作实施。
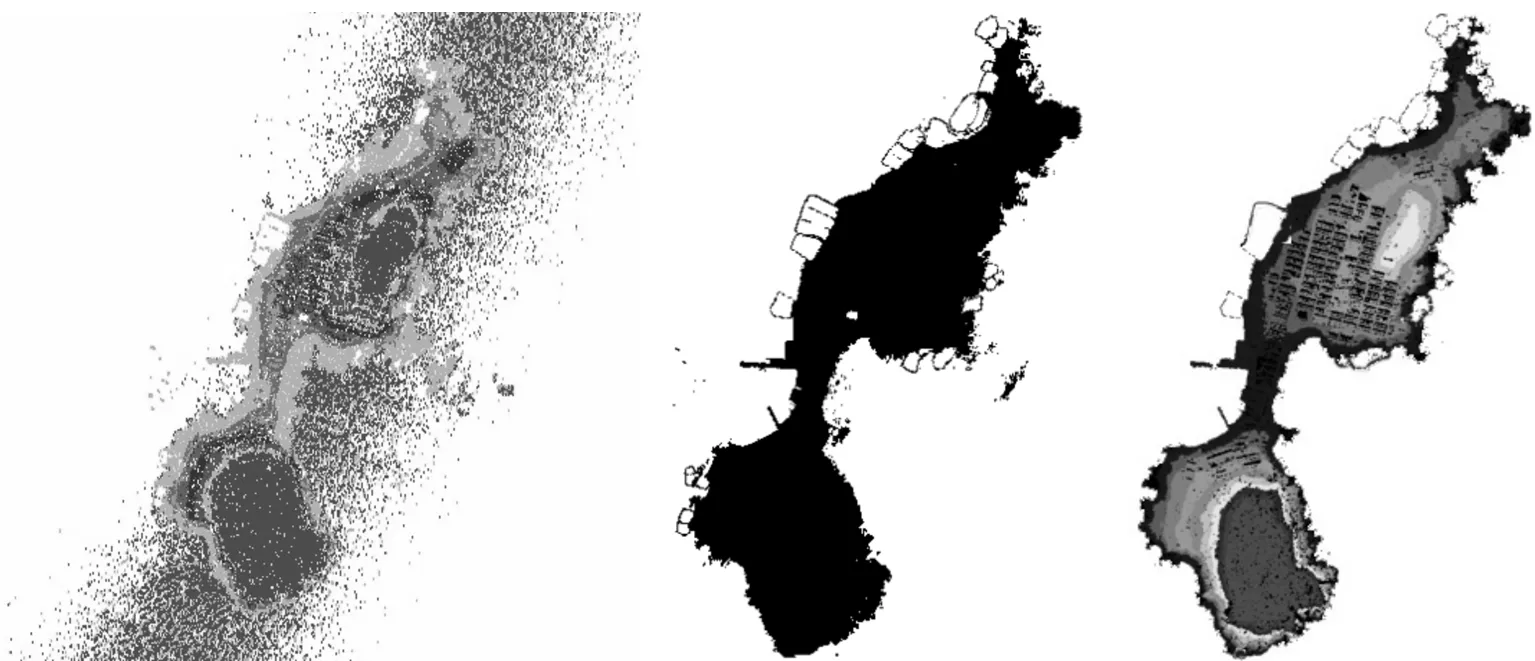
图3 机载LiDAR获取海岛轮廓和三维地形
船载LiDAR系统主要由以下三个主要部分构成:①空间数据采集系统,一般包括三维激光扫描仪,多波束测深仪、和GPS接收机等;②辅助设备,主要负责姿态、声速等改正数据的采集;③设备控制程序,主要用于控制三维激光扫描仪等仪器工作状态的控制,并并具备数据采集、存储、可视化和初步校准功。船载LiDAR系统利用三维激光扫描技术对陆地进行扫描获得点云数据,通过多波束获取水下地形的三维数据。GPS提供船体导航定位信息,并通过辅助设备得到船体的横摇、纵摇和艏向偏差等运动姿态数据,主要技术流程如图4所示。

图4 船载激光三维扫描系统技术路线
如图5所示,船载LiDAR激光扫描,主要采集海岛的立面数据,受激光发射角度和地形起伏限制,往往海岛顶部数据无法获得。而机载LiDAR激光扫描,采集的都是海岛的蓬顶数据,陡峭的岩壁和复杂的沟壑,往往数据稀疏甚至没有,故二者存在优势互补,集成化测量的趋势。

图5 船载LiDAR获取海岛三维地形
5 总结与展望
移动激光扫描测量技术,目前在欧美等发达国家已是一种广泛运用的测量手段。奥地利RIEGL、瑞士Leica、加拿大Optech、英国MDL、日本Topcon等推出的移动激光扫描设备相关产品也较为成熟,国内的设备研发和代理商(如中海达、地海仪器)等,也通过利用国外的先进软硬件实现了移动激光扫描测量系统的集成。
近年随着测量需求的不断拓展,应用于海岛海岸带地形测量的案例在国外很多;在国内,目前据不完全统计,已有江苏、山东、浙江、福建和河北等沿海地区进行了移动海岛海岸激光测量方面的尝试[7]。移动激光扫描测量能快速获取地表三维点云,随着大数据处理手段的不断完善,它能够完成三维地理数据制作、街景数据生产和矢量地图数据建库,广泛应用于三维数字城市、街景地图服务、交通基础设施测量、城管部件普查、航道堤岸测量、矿山三维测量、海岛礁岸线三维测量等领域,呈现出地面车载一体化、机载车载一体化、室内室外一体化、水上水下一体化、地上地下一体化等特点。随着GPS、IMU、激光器硬件和处理软件的发展,移动激光扫描测量精度和性能将不断提高;随着元器件国产化的加快,其成本将不断降低,笔者预测未来5年,这一技术的推广尤其是在地形测绘领域的应用,将呈井喷式发展。
[1] GB/T18190-2000. 海洋学术语 海洋地质学[S].
[2] 楼燕敏,吴迪. 机载LiDAR技术在浙江省滩涂海岸测量中的应用研究[J]. 测绘通报,2012,12:47~50.
[3] 徐双全. 上海市滩涂水下地形测量研究[J]. 海洋测绘,2007,23(3):71~74.
[4] 沈蔚. 基于LIDAR数据的地形、地物提取与三维模型重建——以马来西亚吉隆坡中心区为例[D]. 北京:北京师范大学,2007.
[5] 杜国庆,史照良,龚越新等. LIDAR技术在江苏沿海滩涂测绘中的应用研究[J]. 城市勘测,2007,5:23~26.
[6] 刘善伟,张杰,马毅等. 遥感与DEM相结合的海岸线高精度提取方法[J]. 遥感技术与应用,2011,26(7):613~618.
[7] 史照良,曹敏. 基于LiDAR技术的海岛礁、滩涂测绘研究[J]. 测绘通报,2007,5:49~53.
The Application of Mobile LiDAR System in Island & Coast Mapping
Xu Liang1,Shen Wei2,Wang Linzhen2
(1.Changzhou Surveying & Mapping Institute,Changzhou 213002,China;2.College of Marine Sciences Shanghai Ocean University,Shanghai 213002,China)
The island & coastal zone was taken as a research object to analyze the principle,composition,advantages and key technologies of the mobile LiDAR system,and the technical processes,application methods and precautions was discussed of both airborne and shipborne mobile LiDAR system in island & coast mapping. On this basis,we made a preliminary summary of its current development and prospects of its future application.
mobile LiDAR system;airborne;shipborne;island & coast mapping
1672-8262(2016)05-76-04
P235
B
2016—08—08
徐良(1976—),男,硕士,高级工程师,主要从事城市规划测量工作。
上海市教育委员会科研创新项目(12ZZ159);中科院空间光电技术重点实验室开放基金项目(2013051)。
