基于震后机载激光雷达点云的建筑物破坏特征分析*
2016-11-28黄树松窦爱霞王晓青袁小祥
黄树松 窦爱霞 王晓青 袁小祥
(中国北京100036中国地震局地震预测研究所)

基于震后机载激光雷达点云的建筑物破坏特征分析*

(中国北京100036中国地震局地震预测研究所)
本文利用2010年海地MW7.0地震震后获取的机载激光雷达(LiDAR)三维点云数据, 通过人机交互的方式选取受损程度不同的典型建筑物点云数据, 比较分析倒塌建筑物与完好建筑物点云数据的高度、 坡度和法向量等分布特征, 提出了用建筑物点云高度均值偏离度、 屋顶面坡度值以及法向量与天顶方向夹角等因子判定建筑物破坏程度. 试验分析结果表明, 高度均值偏离度因子对单个建筑物的破坏部分识别效果较好, 屋顶面坡度值因子可以识别建筑物破坏部分的边缘, 点云法向量与天顶方向夹角因子能够较好地识别大范围区域内的建筑物破坏情况, 因此上述判定因子均能在一定情况下表征建筑物的破坏情况.
机载激光雷达(LiDAR)点云 海地MW7.0地震 建筑物破坏特征 判定因子
引言
在众多关于地震造成的人员伤亡因素分析的研究中不难发现, 虽然地震造成的人员伤亡是多种因素综合作用的结果(马玉宏, 谢礼立, 2000), 但是作为地震直接灾害的建筑物倒塌是其中一个非常重要的影响因素(王艳茹等, 2009; 陈洪富等, 2011). 因此, 分析地震造成的建筑物破坏情况, 对于震后应急救援和损失评估等具有重要意义.
机载激光雷达(light detection and ranging, 简写为LiDAR)技术是一门新兴的技术, 可以快速地获取大范围高精度的高程信息, 因此可以用于检测一些常规二维影像上无法检测的建筑物破坏细节. 目前利用LiDAR数据进行地震灾害方面的研究大多集中在地表破裂、 滑坡、 道路及堰塞湖等(董秀军, 黄润秋, 2008; 马洪超等, 2008; 袁小祥等, 2012; 马俊伟等, 2014). 对于地震造成的建筑物倒塌情况, 近年来也有众多学者进行了研究, 例如: Vu等(2004)提出了一种基于地震前后两个时相的LiDAR数据集的建筑物变化检测方法, 将建筑物的变化分为未变化、 新修建的建筑物和拆除的建筑物等3种类别; Schweier和Markus(2004)根据房屋体积的减小、 高度的降低、 房屋倾角的变化及房屋大小等, 给出了地震所造成的建筑物破坏目录, 并进行了实例分析; Rehor(2007)运用基于模糊逻辑分析法对震前震后的建筑物屋顶面进行分类, 并将其划分到事先定义好的破坏类别中. 上述研究依赖于震前震后两个时相的LiDAR点云数据, 但是目前很多地区没有LiDAR点云数据, 因此利用灾前灾后机载LiDAR点云数据的建筑物震害变化检测法很难在震后应急中得到实际应用.
众多研究者利用LiDAR点云数据对建筑物震害进行了分类提取. 例如: Ural等(2011)运用面向对象法对震后的建筑物和废墟进行分类, 主要考虑了影像和点云数据的光谱、 纹理及高度特征; Khoshelham和Elberink(2012)通过LiDAR点云数据与多光谱影像结合, 对LiDAR点云数据进行分割, 并讨论了减少特征空间维度在识别建筑物屋顶毁坏情况中的作用; 窦爱霞等(2013)采用面向对象法, 综合震后机载LiDAR点云数据和高分辨率卫星影像的光谱、 纹理、 形状和高度特征参数, 自动分类提取倒塌建筑物和未倒塌建筑物; Dong和Guo(2012)通过模拟分析不同类型屋顶结构的房屋, 在部分倒塌及完全倒塌情形下, 由建筑物点云的三维形状特征与高分辨率遥感影像提取的三维高程特征的相关系数确定房屋的破坏程度. 上述研究需要有多光谱或其它数据的辅助, 然而辅助影像和机载LiDAR点云实现高精度配准所需花费的时间较长.
本文拟利用震后机载LiDAR点云数据, 依据典型建筑物的震害类型, 由建筑物点云的高度、 坡度和法向量等空间特征, 提出识别建筑物破坏程度的空间定量判定因子, 并试验确定其因子阈值, 为后续建筑物震害自动检测与定量分析奠定基础.
1 建筑物破坏点云判定因子
1.1 建筑物高度均值偏离度
倒塌建筑物的重要特征就是高度相比未遭受地震破坏的建筑物有所降低. 由于机载LiDAR可以获取高精度的高度信息, 因此高度成为检测震后建筑物破坏的重要特征. 定义某一点云高度值h与整个建筑物屋顶点云高度均值hmean的距离的绝对值与hmean的比值为该点云与整个屋顶点云高度均值的偏离程度m, 用公式表示为
(1)
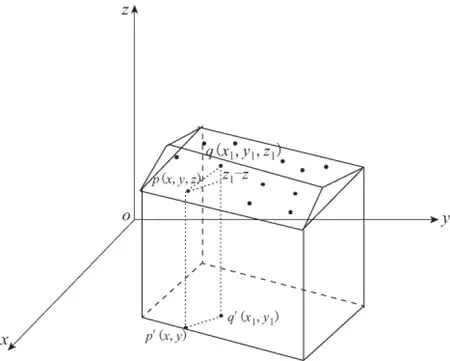
图1p点坡度值计算示意图, 黑点为点云数据Fig.1 The calculation schematic diagram of slope value for the point p. The black spots are the point cloud data
1.2 建筑物屋顶面坡度
在建筑物完好情况下, 不同屋顶形态的建筑物屋顶相邻点云之间的坡度值应为一固定值. 当建筑物某部分倒塌后, 其破坏部分和未破坏部分点云的坡度值会发生变化. 将建筑物屋顶点云投影到二维平面oxy上, 记建筑物屋顶一点云坐标为p(x,y,z), 其投影到oxy平面上的点坐标为p′(x,y); 搜索点p′附近的最邻近点, 记为q′(x1,y1), 则点q′所对应的三维点坐标为q(x1,y1,z1)(图1). 记点p的坡度值为s, 则
(2)
1.3 点云法向量与天顶方向的夹角
Hoppe等(1992)提出了基于局部表面拟合的方法计算每个点的法向量信息, 其基本原理为: 记查询点为p, 搜索p的k个最邻近点p1,p2, …,pk, 将计算平面上某一点的法向量转换成求取平面在该点处的平面切线的法向量, 即求取这些点的最小二乘平面P, 因此可将上述过程转化为求解由最邻近点组成的协方差矩阵M的最小特征值和特征向量, 最小特征值的特征向量即为法向量, 其计算公式为
(3)

为了使所求取的法向量方向指向明确, 规定天顶方向的某一点为视点坐标, 使所求取的法向量均指向天顶方向的这一点, 同时也有利于计算其法向量与天顶方向的夹角. 本文规定视点坐标为(0, 0, 100), 得到法向量后计算其与天顶方向的夹角θ, 然后根据夹角大小分析建筑物的破坏特征.
2 基于机载LiDAR点云的建筑物震害分析
2.1 试验数据
本文选取2010年1月21日海地MW7.0地震后ImageCat公司获取的机载LiDAR点云数据(OpenTopography, 2010)中首都太子港局部区域的两处点云数据, 如图2所示, 点云密度约为4.439 点/m2, 在该范围内选取遭受地震破坏的典型建筑物点云数据, 并对其进行分析试验. 由于机载LiDAR点云中包含其它杂物点云, 如汽车、 植被等, 为研究本文确定的震害判定因子对震害程度的检测效果, 应尽可能地去除噪声, 因此选用建筑物点云数据时采用人机交互的方式, 结合高分辨率光学影像, 手工精确地选取研究所需的数据.

图2 高度较低(a)和高度较高(b)区域的机载LiDAR点云数据
2.2 建筑物震害特征分析
2.2.1 高度均值偏离度因子
在研究区内选取人字形顶面的部分倒塌建筑物和完好建筑物, 即图3a中红框所标示的建筑物, 其点云分布如图3b所示. 利用式(1)计算破坏建筑物点云的高度均值偏离度m, 结果如图3c所示. 部分倒塌建筑物倒塌部分与未倒塌部分的m值分布特征的比较分析结果表明, 倒塌部分的m值较大, 呈离散状态分布, 而其原始点云数据因倒塌部分的高度明显降低, 其空间位置与离散分布m值较大部分相吻合. 完好建筑物的m值, 除极少量噪声点处较大外, 其它点处m值相对较小, 分布比较集中. 为进一步分析m值对震害的表征程度, 将其投影到二维空间中, 如图3d所示. 可以看出, 部分倒塌建筑物的完好部分与倒塌部分的m值空间分布差异显著: 完好部分的m值在0—0.2之间, 倒塌部分的m值在0.2—0.56之间; 完好建筑物的m值在0—0.15之间, 只有个别噪声点云的m值超过了0.15. 统计两栋建筑物的m值频度(图4), 并选取多栋部分倒塌建筑物和完好建筑物进行试验, 结果显示当m值的阈值约为0.2时, 部分倒塌建筑物和完好建筑物的识别效果均较好.
2.2.2 坡度因子
利用式(2)对图3b的建筑物点云数据的坡度特征进行分析, 结果如图5所示. 比较部分倒塌建筑物的倒塌部分与未倒塌部分的s值分布特征, 可以看出, 倒塌部分的s值变化明显且呈离散分布状态. 图5a中部分倒塌建筑物原始点云中的倒塌部分与s值的较大部分相吻合. 完好建筑物的s值, 除少量噪声点处较大外, 其它点处的s值相对较小, 集中分布在某一固定值. 将s值投影到二维空间(图5b), 可以看出: 部分倒塌建筑物的倒塌部分与完好部分点云的s值差异变化明显, 完好部分的s值集中在-3—3之间, 倒塌部分的s值则超出此范围; 完好建筑物的s值在-2—2之间, 只有极少部分噪声点的m值超出此范围. 统计两栋建筑物的s值频度(图6), 并选取多栋倒塌及完好建筑物点云数据进行试验, 结果显示, 当s值约为±3时, 部分倒塌建筑物与完好建筑物可以较好地被识别.
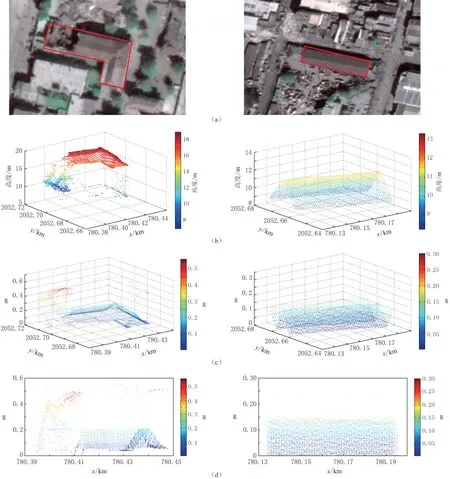
图3 部分倒塌建筑物(左)和完好建筑物(右)高度均值偏离度m的计算结果
2.2.3 点云法向量与天顶方向的夹角因子
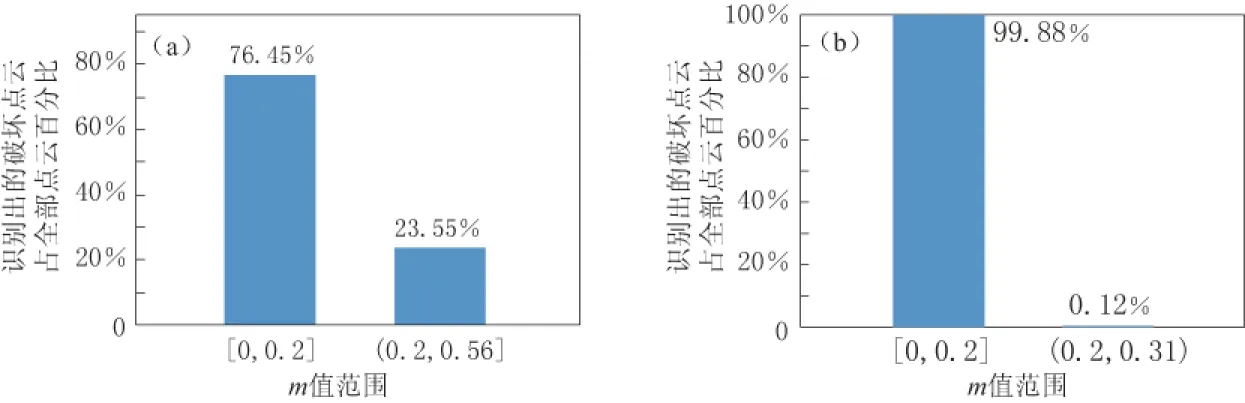
图4 部分倒塌建筑物(a)和完好建筑物(b)的高度均值偏离度m分布直方图

图5 部分倒塌建筑物(左)和完好建筑物(右)坡度值s的计算结果

图6 部分倒塌建筑物(a)和完好建筑物(b)的坡度值s分布直方图
较集中. 为更好地表现θ值对建筑物震害的表征程度, 将θ投影到二维空间中, 如图7c所示. 可以看出: 部分倒塌建筑物的倒塌部分θ值较大, 超过30°, 完好部分的θ值在0°—30°

图7 部分倒塌建筑物(左)和完好建筑物(右)的法向量与天顶方向夹角θ的计算结果

图8 部分倒塌建筑物(a)和完好建筑物(b)的法向量与天顶方向夹角θ分布直方图
之间; 完好建筑物的θ值在0°—25°之间, 只有极少数θ值超过25°. 统计两栋建筑物的θ值频度分布图(图8), 并选取多栋倒塌建筑物和完好建筑物的点云, 经试验确定当θ值为30°时, 部分倒塌建筑物和完好建筑物的识别效果均较好.
2.3 基于机载LiDAR的震害识别试验
在研究区中选取了包含完全倒塌、 部分倒塌以及完好等不同建筑物震害类型的点云进行震害识别效果检验, 计算了该区域的高度均值偏离度m、 坡度值s及法向量与天顶方向夹角θ, 并用上述初步阈值对验证区域进行识别, 得到的结果如图9所示. 图9a中编号1, 4, 5为部分倒塌的建筑物, 编号2, 3为完全倒塌的建筑物; 红色圆圈标示的是遭受地震破坏的建筑物, 下部为其破坏部分的放大图. 可以看出: 部分倒塌建筑物1, 5与4的倒塌形态不同, 倒塌部分的光学影像与未倒塌部分均表现出明显的纹理变化; 而完全倒塌建筑物2, 3在光学影像上亮度和纹理与完好建筑物差异明显. 因为区域内建筑物高度相差较大,
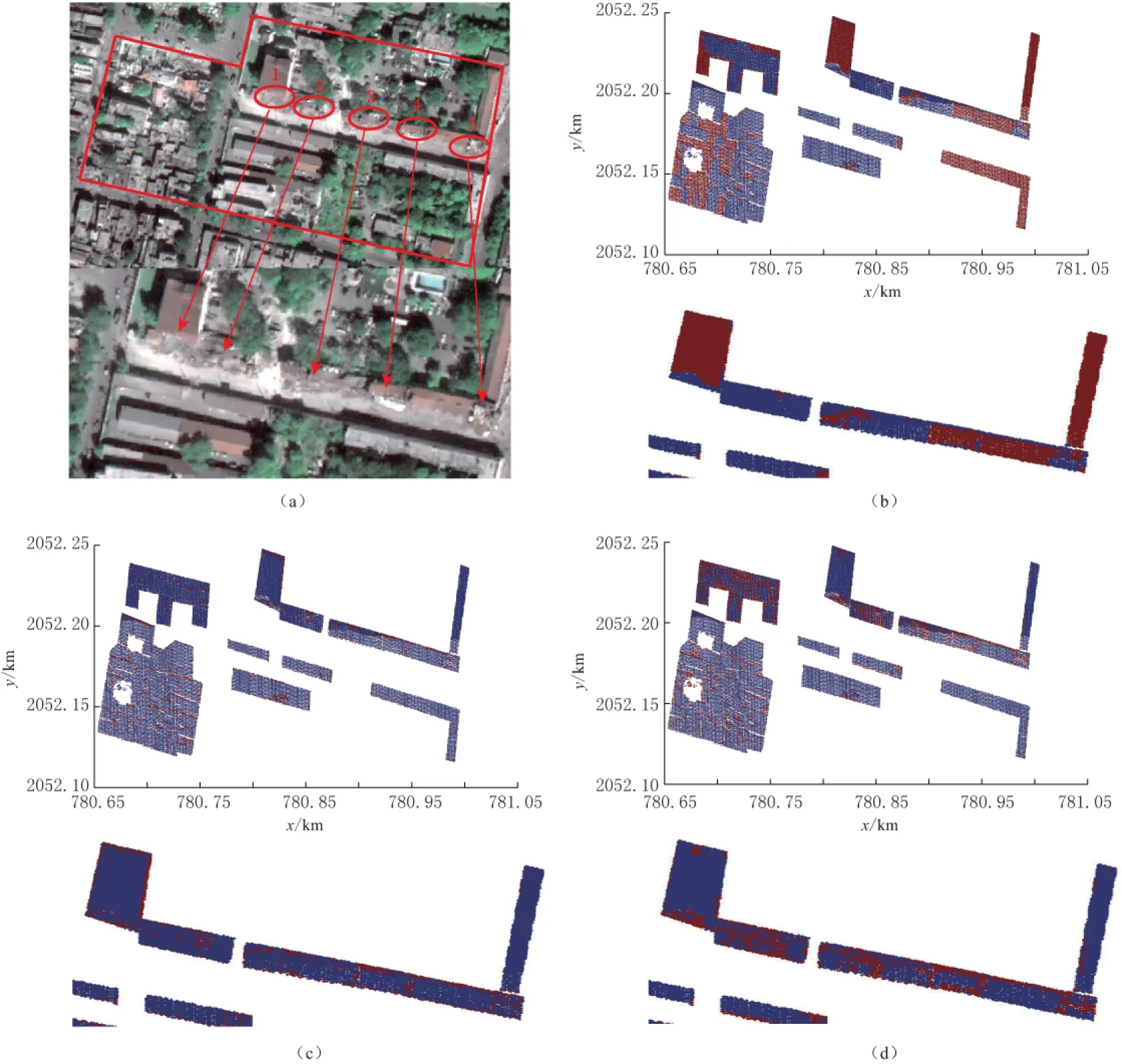
图9 研究区域内各建筑物震害因子计算结果
根据该区域计算出的高度均值偏离度m(图9b)按其阈值识别后, 原本较高或较低的建筑物容易被识别成倒塌建筑物(红色为超出阈值部分, 即为识别出的破坏点云, 下同), 因此该特征因子m能够识别出单个建筑物的破坏部分, 但在大范围应用时, 仍需进一步优化, 需考虑不同建筑物单体本身的高度差异. 图9c中的坡度值s可以较好地检测建筑物破坏部分与完好部分的交界处以及建筑物本身的边界; 图9d中的法向量与天顶方向夹角θ的阈值识别结果与实际破坏的结果比较接近. 同时, 各特征因子还准确识别了研究区内的平顶建筑物, 表明特征因子对不同形态房屋的适用性. 上述试验证明,θ值在大范围点云数据的震害识别方面具有通用性, 是一个能够定量识别建筑物震害的有效因子.
3 讨论与结论
本文利用机载LiDAR点云数据的高度、 坡度和法向量特征, 提出了高度均值偏离度、 坡度值和法向量与天顶方向夹角等用于建筑物震害识别的判定因子, 经分析确定了各因子的阈值, 并将各因子应用于较大区域内验证所确定的因子阈值. 试验证明: 高度均值偏离度m因子因房屋高低差异较大, 在大范围应用时其通用性受到影响; 坡度值s因子在检测建筑物破坏部分的边缘具有优势; 法向量与天顶方向夹角θ因子的通用性和适用性均较强, 是一个能有效检测建筑物破坏特征的因子.
本文使用的点云数据为人工交互选取的精确点云数据, 因此在实际应用时应对机载LiDAR点云数据进行处理, 以获得较为精确的建筑物点云数据. 本文只对机载LiDAR点云数据的部分空间特征单独进行了定量分析, 后续将进一步研究利用机载LiDAR点云数据提取建筑物震害的更多空间特征, 发展多维特征空间综合震害识别的方法, 以期实现高精度建筑物震害的自动判别与评估.
农村小学艺术课程教学的设备极为简陋,艺术课程设施几乎没有。这与教育行政部门对农村艺术教育的投入有关,也与农村小学自身资金不足有关,学校把有限的资金向主科倾斜,导致艺术课程教育教学投入极为不足,教学设施严重缺乏。
陈洪富, 戴君武, 孙柏涛, 王艳茹, 张沧海. 2011. 玉树7.1级地震人员伤亡影响因素调查与初步分析[J]. 地震工程与工程振动, 31(4): 18--25.
Chen H F, Dai J W, Sun B T, Wang Y R, Zhang C H. 2011. Investigation report on influence factors of casualties in April 14, 2010 Yushu earthquake[J].JournalofEarthquakeEngineeringandEngineeringVibration, 31(4): 18--25 (in Chinese).
董秀军, 黄润秋. 2008. 三维激光扫描测量在汶川地震后都汶公路快速抢通中的应用[J]. 工程地质学报, 16(6): 774--779.
Dong X J, Huang R Q. 2008. Application of 3D laser scanner in making Duwen road travelable in short term after Wenchuan earthquake[J].JournalofEngineeringGeology, 16(6): 774--779 (in Chinese).
窦爱霞, 马宗晋, 黄文丽, 王晓青, 袁小祥. 2013. 基于机载LiDAR和多光谱图像的建筑物震害自动识别方法[J]. 遥感信息, 28(4): 103--109.
Dou A X, Ma Z J, Huang W L, Wang X Q, Yuan X X. 2013. Automatic identification approach of building damages caused by earthquake based on airborne LiDAR and multispectral imagery[J].RemoteSensingInformation, 28(4): 103--109 (in Chinese).
马洪超, 姚春静, 张生德. 2008. 机载激光雷达在汶川地震应急响应中的若干关键问题探讨[J]. 遥感学报, 12(6): 925--932.
Ma H C, Yao C J, Zhang S D. 2008. Some technical issues of airborne LiDAR system applied to Wenchuan earthquake relief works[J].JournalofRemoteSensing, 12(6): 925--932 (in Chinese).
马俊伟, 唐辉明, 胡新丽, 雍睿, 夏浩, 宋友建. 2014. 三维激光扫描技术在滑坡物理模型试验中的应用[J]. 岩土力学, 35(5): 1495--1505.
Ma J W, Tang H M, Hu X L, Yong R, Xia H, Song Y J. 2014. Application of 3D laser scanning technology to landslide physical model test[J].RockandSoilMechanics, 35(5): 1495--1505 (in Chinese).
马玉宏, 谢礼立. 2000. 关于地震人员伤亡因素的探讨[J]. 自然灾害学报, 9(3): 84--90.
Ma Y H, Xie L L. 2000. A study on factors influencing earthquake casualties[J].JournalofNaturalDisasters, 9(3): 84--90 (in Chinese).
王艳茹, 王宝光, 戴君武, 冯学刚, 黄腾浪, 唐丽华. 2009. “5·12” 汶川大地震人员伤亡的时空分布特点[J]. 自然灾害学报, 18(6): 52--56.
Wang Y R, Wang B G, Dai J W, Feng X G, Huang T L, Tang L H. 2009. Spatiotemporal distribution characteristics of casualties in great “5·12” Wenchuan earthquake[J].JournalofNaturalDisasters, 18(6): 52--56 (in Chinese).
袁小祥, 王晓青, 窦爱霞, 董彦芳, 王龙, 金鼎坚. 2012. 基于地面LIDAR玉树地震地表破裂的三维建模分析[J]. 地震地质, 34(1): 39--46.
Yuan X X, Wang X Q, Dou A X, Dong Y F, Wang L, Jin D J. 2012. Terrestrial LIDAR-based 3D modeling analysis of surface rupture caused by Yushu earthquake[J].SeismologyandGeology, 34(1): 39--46 (in Chinese).
Dong P L, Guo H D. 2012. A framework for automated assessment of post-earthquake building damage using geospatial data[J].IntJRemSens, 33(1): 81--100.
Hoppe H, DeRose T, Duchamp T, McDonald J, Stuetzle W. 1992. Surface reconstruction from unorganized points[C]∥Proceedingsofthe19thAnnualConferenceonComputerGraphicsandInteractiveTechniques. New York, USA: ACM: 71--78.
Khoshelham K, Elberink S O. 2012. Role of dimensionality reduction in segment-based classification of damaged building roofs in airborne laser scanning data[C]∥Proceedingsofthe4thGEOBIA. Rio de Janeiro, Brazil: 372--377.
OpenTopography. 2010. Post-January 2010 Haiti earthquake LiDAR data now availableviaOpenTopography[EB/OL]. [2015-08-17]. http:∥opentopography.org/news/post-january-2010-haiti-earthquake-lidar-data-now-available-opentopography.
Rehor M. 2007. Classification of building damage based on laser scanning data[J].PhotogrJFinl, 20(2): 54--63.
Schweier C, Markus M. 2004. Assessment of the search and rescue demand for individual buildings[C]∥Proceedingsofthe13thWorldConferenceonEarthquakeEngineering. Vancouver, Canada: Mira Digital Publishing: 3092.
Ural S, Hussain E, Kim K H, Fu C S, Shan J. 2011. Building extraction and rubble mapping for city Port-au-Prince post-2010 earthquake with GeoEye-1 imagery and Lidar data[J].PhotogrEngRemSens, 77(10): 1011--1023.
Vu T T, Matsuoka M, Yamazaki F. 2004. LIDAR-based change detection of buildings in dense urban areas[C]∥Proceedingsofthe2004IEEEInternationalGeoscienceandRemoteSensingSymposium. Anchorage, AK: IEEE: 3413--3416.
Building damage feature analyses based on post-earthquake airborne LiDAR data
(InstituteofEarthquakeScience,ChinaEarthquakeAdministration,Beijing100036,China)
Building damage detection can be more accuracy because that the airborne LiDAR system can acquire height of buildings and other high resolution information, therefore airborne LiDAR data will be an important data source in post-earthquake disaster evaluation in the future. This paper chooses the typical building point cloud data on different damage condition from the airborne LiDAR point cloud data acquired after theMW7.0 earthquake in Haiti in 2010, and compares the distribution of the features such as height, slope and normal vector of damaged and non-damaged buildings. And then we establish the building damage determination factors, such as mean height deviation, slope value of building roof, and the intersection angle between normal vector and zenith direction. The results show that all factors can be used to recognize building damage in different condition, that is to say, mean height deviation can be used to detect the damage of single building, the slope value can be used to detect the damage part border of building, the intersection angle is a better factor that can be used to detect building damage in large areas.
airborne LiDAR point cloud; HaitiMW7.0 earthquake; building damage feature; determination factor
国家自然科学基金(41404046)资助.
2015-10-14收到初稿, 2016-01-22决定采用修改稿.
e-mail: axdothy@163.com
10.11939/jass.2016.03.014
P315.9
A
黄树松, 窦爱霞, 王晓青, 袁小祥. 2016. 基于震后机载激光雷达点云的建筑物破坏特征分析. 地震学报, 38(3): 467--476. doi:10.11939/jass.2016.03.014.
Huang S S, Dou A X, Wang X Q, Yuan X X. 2016. Building damage feature analyses based on post-earthquake airborne LiDAR data.ActaSeismologicaSinica, 38(3): 467--476. doi:10.11939/jass.2016.03.014.