风电场信息实时采集系统设计❋
2016-11-28吴锦生王剑平
吴锦生,王剑平
(昆明理工大学信息工程与自动化学院,昆明650500)
风电场信息实时采集系统设计❋
吴锦生,王剑平
(昆明理工大学信息工程与自动化学院,昆明650500)
针对目前风电场信息采集时间间隔大,影响风力发电组风功率实测精度,以及来风方向、风速等不确定因素影响发电功率的问题,提出了一种基于STM8L和ZIGBEE的风电场信息实时采集系统设计方案。系统采用基于STM8L的姿态电路和气压和温湿度传感器分别实时测量风向、风速、气压强度、温度、湿度等环境信息,采用GPRS无线通信模块远程监测各风力发电组状态,从而达到实时便捷监测风电场状态和提高风力发电功率测量精度的目的。
风向;风速;气压;功率;姿态电路;温度;湿度
1 引 言
目前,风电场每十分钟记录一次平均风速、风向和实测功率值等参数值,而温度湿度仅靠数值天气预报预测,这会因为数据采集量少和未考虑空气密度增大、风力发电组实地温湿度、压强、上下风向对风力发电组输出功率的影响而使风电场实测发电功率不准确。
针对以上问题,提出了基于STM8L和GPRS的风电场信息实时采集系统,系统由GPRS电路、温度传感器电路、湿度传感器电路、姿态测量电路、气压传感器电路,MAX4066低损耗开关电路组成,整体设计框图如图1所示。
2 硬件设计
2.1超低功耗电路设计
系统采用锂电池供电,对于电池供电系统来说,功耗是非常重要的指标[1-3]。因此,利用STM8L超低功耗CPU电路和MAX4066低损耗开关电路对传感器电路和GPRS通信电路进行电源供电控制可以减少系统空闲时外围电路不必要的损耗。
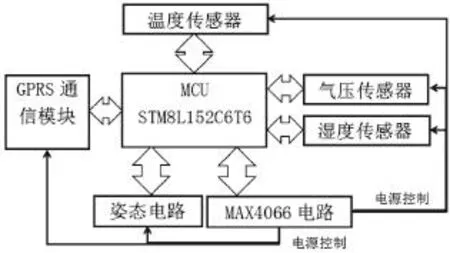
图1 系统整体设计框图
超低功耗具体实施步骤:系统采集温湿度、气压、风向、风速信息前通过低损耗开关关闭GPRS通信模块,等到传感器数据采集结束再打开GPRS模块进行无线数据传输,同时关闭传感器采集电路,等到GPRS数据传输结束时关闭GPRS模块并且系统进入超低功耗睡眠模式,等待系统定时唤醒重新进入数据采集和无线通信阶段。通过调整定时唤醒时间可以有效控制风电场信息采集速率,经由GPRS模块可以远程设置各风力发电组的数据采集速率。
2.2姿态电路设计
姿态电路主要包括L3G4200D、ADXL345和HMC5883L电路。该电路采用IIC总线与STM8L微控制器进行通信,主要负责采集风向、风速信息,由于姿态电路可以测量三维姿态角,因此相对于传统的0~360度风向信息,姿态电路还可以实时监测风向的变化情况。通过测量三维姿态角可以有效解决上风向风电机组尾流对下风向风电组影响使得下风向风电机组捕获风能减少及相应电机组出力降低的问题。姿态传感器电路如图2所示。
2.3温度和湿度传感器电路设计
系统选用DS18b20作为温度传感器检测风力发电机环境温度。考虑到风电机组外部环境条件复杂,因此采用防水DS18b20探头来测量温度,DS18b20作为一种单总线数据温度传感器,其测量温度范围大、精度高而且由于不需要时钟线,故其占用的STM8L I/O端口少,其外围电路配置简单,仅需4.7K欧的上拉电阻。
系统采用HS1101作为湿度传感器,其测量范围为0~100%RH,误差在-2%~+2%RH之间,而且其年漂移量较小。利用HS1101电容量随空气湿度变化呈现同性变化的特性,将HS1101振荡电路产生的正弦波电压信号经过整流、直流放大输出脉冲信号,并将脉冲信号经过二极管整流电路、RC积分电路和线性调理电路后输出在0~3.3V区间随湿度变化的电压信号。STM8L通过A/D转换模块将HS1101输出的直流电压转化为数字量并换算为对应的环境湿度数据。
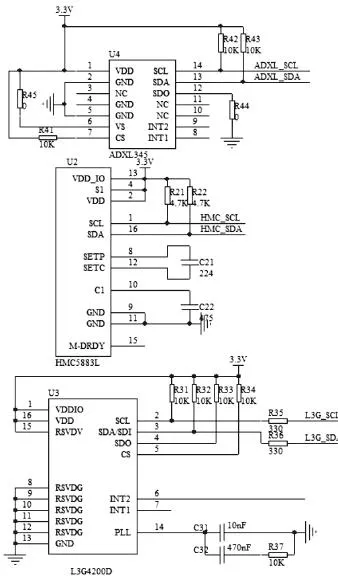
图2 姿态电路
2.4GPRS通信电路设计
GPRS作为一种采用分组交换技术的数据传输技术,具有实时在线、高速传输等优点,被广泛应用于工业控制领域,其应用于风电场监控监测非常合适[4]。系统采用工业级TC35i模块,其GPRS模块具备永久在线功能并能够提供最快的数传速率,其供电范围为DC3.3~4.8V。通过串口通信可以读写TC35i模块,接口电路简单[5]。
2.5电源转化模块设计
由于系统需要3.3V、4.2V和5V三种电源供电,故设计了CE8301和LTC3440芯片构成升降压电路,CE8301电路将电池电压升至5V,而LTC3440电路将电池电压降至3.3V,进而满足系统供电需求。
2.6气压传感器电路设计
系统采用BMP085气压传感器测量大气压强。BMP085是一款高精度、超低功耗的数字传感器,可以通过IIC接口与STM8L连接通信,传感器内部EEPROM存储11个校准系数,用于对气压传感器进行温度补偿,从而降低外部环境造成的误差,提高传感器测量精度[6]。
3 姿态电路三维姿态测量
3.1陀螺仪求解三维姿态角
利用陀螺仪获取三轴角速度Wx、Wy、Wz,并且利用三轴角速度解算出姿态四元数,姿态四元数与三轴陀螺仪角速度满足公式(1)的微分关系。
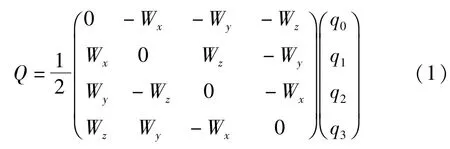
其中(q0,q1,q2,q3)T四元数初始化为(1,0,0,0),Q为(¯q0,¯q1,¯q2,¯q3)T表示矩阵求解更新后的姿态四元数。
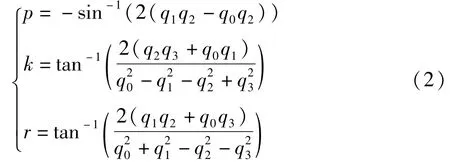
通过更新得到的四元数矩阵经由式(2)可以得到陀螺仪求算的三维姿态角,其中,p为俯仰角,k为翻滚角,r为偏航角。
3.2重力加速度获取三维姿态角
设定系统初始化状态选取z轴竖直向上,从而p范围为-90至90度,k范围为-180至180度,r范围为0至360度,从而得到翻滚角k和俯仰角p的计算公式为式(3)。其中,Ax、Ay、Az分别是测得的X轴、Y轴和Z轴的重力加速度

因此,可以通过三维重力加速度求算出此时的三维姿态角。
3.3三维姿态角修正
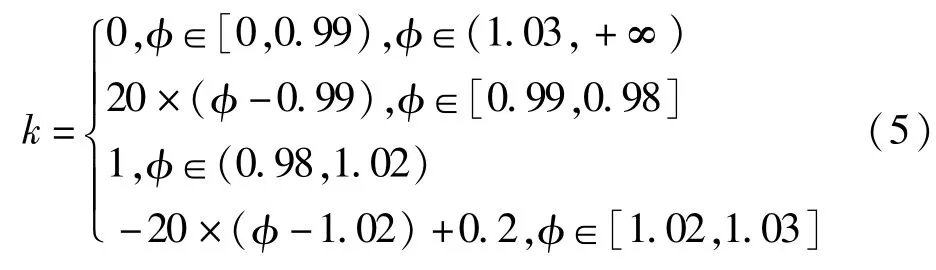
在没有外力只有重力作用的情况下,重力加速度求算的三维姿态角为实际三维姿态角,此时重力加速度的三轴测量值的平方和应为1。然而,由于测量值存在误差,故需要利用加速度求算得到的姿态角修正陀螺仪得到的姿态角,从而得到精确的三维姿态角,通过数学建模和数据可以得到如式(4)的修正模型。

其中Aacce为重力加速度求算得到的姿态角,Agry为陀螺仪求算得到的姿态角,R为系统修正输出的姿态角,k为修正因子。修正因子的取值如式(5),其中φ表示三轴重力加速度测量值的平方和。
系统先经过卡尔曼滤波降低加速度计的噪声干扰,并利用加速度计得到的三轴旋转角修正陀螺仪得到的姿态角,从而解决了陀螺仪漂移。其输出的俯仰角和翻滚角可以用于表示风力发电机组受风的上下左右偏向,而水平风向则需要通过偏航角利用电子罗盘校准得到,通过倾斜补偿方法,减小航向角检测的误差。姿态角中的偏航角由式(6)对磁强计进行倾斜补偿获得。其中,Mx、My、Mz分别为磁强计测得的三轴磁场强度。此时就可以获得准确的水平风向角β。

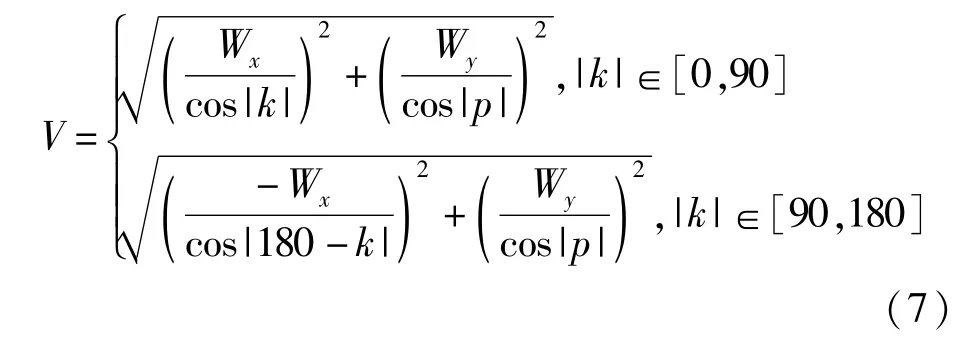
通过测量陀螺仪瞬时角速度可以得到瞬时风速信息,如式(7)。其中V为姿态电路测得的实时风速数据。
4 气压与海拔高度换算
若假设空气处于理想大气压状态,由于BMP085传感器测量的海拔范围为-500m至9000m,则由式(8)可获得气压所对应的海拔高度[7-8]。

其中,H为换算得到的海拔高度,Ph为传感器测得的大气压强度。
5 测试结果与分析
利用重力加速度校准陀螺仪并采取参数修正的方法可以得到准确的三维姿态角输出,无校准与校准情况下输出的俯仰角数据对比如图3所示。

图3 姿态校准前后数据对比
系统处于稳定状态时,由于外力影响,系统三轴重力加速度和陀螺仪数据会不稳进而导致计算得到的姿态角误差较大,通过重力加速度校准陀螺仪并通过修正可以获得比较精确的姿态角输出。风向角度主要采用姿态角中的偏航角表示,由于偏航角还受地磁场影响,因此需要利用校准后的偏航角校准磁强计三轴磁强从而获得实际准确的偏航角,即为实际风向角。校准前后的偏航角如图4所示。

图4 校准前后偏航角对比
可以看出,校准后偏航角的波动相对于姿态解算得到的偏航角要小很多,而且收敛性好。通过式(9)可以计算出风力发电组获得的风功率,其中P为输出功率,kW;C为风力发电机组功率系数;ρ为空气密度,kg/m3;A为风轮扫风面积,m2;V为风速,m/s。

由于风速、气压、环境温湿度等因素是风力发电功率的主要影响因素,因此通过测量这些因素可以获得精确的功率信息。
6 结束语
基于STM8L和GPRS的风电场信息实时采集系统设计利用姿态电路测量风向和风速,利用温度、湿度、气压传感器测量风电机组环境温湿度、气压强度,利用STM8L微控制器和MAX4066低损耗开关实现系统超低功耗,利用GPRS模块支持在线实时监测,系统数据采集精度高,实时性好。
[1]陈静,金林.便携式煤矿电网参数实时检测仪器的研究[J].煤矿机械,2005(4):99-101.Chen Jing,Jin Lin.Study on the Portable Digging Electrical Net Detect Instrument[J].Coal Mine Machinery,2005(4):99-101.
[2]张军,徐海宁,郑强,等.一种超低功耗便携式高斯计的设计[J].仪表技术与传感器,2011(11):98-99,103.Zhang Jun,Xu HaiNing,Zheng Qiang.Design of Portable Gauss Meter with Ultra Low Power Consumption[J].Instrument Technique and Sensor,2011(11):98-99,103.
[3]李威,庞洵,刘大伟.矿用便携式锚杆测力仪的研制[J].煤矿机械,2007(1):112-114.Li Wei,Pang Xun,Liu DaWei.Research on Portable Dynamometer for Anchor Stem in Mine[J].Coal Mine Machinery,2007(1):112-114.
[4]曹卫,董航飞,李宗宝.GPRS技术在水利监测系统中的应用[J].排灌机械,2007,25(5):39-42.Cao Wei,Dong HangFei,Li ZongBao.Application of GPRS technology in hydraulic monitoring system[J].Drainage and Irrigation Machinery,2007,25(5):39-42.
[5]叶卫,胡俊达.基于TC35iGSM模块的短消息收发系统设计[J].电子质量,2008(6):27-29.Ye Wei,Hu JunDa.The Design of Short Message Communication System Based on GSM TC35i Module[J].Electronics Quality,2008(6):27-29.
[6]BOSCH Sensortec.BMP085 Digital Pressure Sensor Data Sheet[EB/OL].[2009-10-15].http://www.boschsensortec.com.
[7]Thomas Bob,Volker Diekmann,Reinhart jurgens.Biological Cybernetics[J].Sensor Fusion by Neural Network Using Spatially Represented Information,2001,85(5):371-385.
[8]吴浩然.大气压强和高度的关系[J].张家口师专学报(自然科学版),1994(1):22-25.Wu HaoRan.Relation of Pressure and Height in the Atmosphere Layer[J].Journal of Zhangjiakou Teachers College(Natural Science),1994(1):22-25.
Design of Wind Farm Real-time Information Acquisition System
Wu Jinsheng,Wang Jianping
(College of Information Engineering and Automation,Kunming University of Science and Technology,Kunming 650500,China)
For the problems,the long time interval of wind power information collection which affects the measurement accuracy of the wind power of the wind power generation group,and the factors such as wind direction,wind speed,etc.,the design approach of the wind farm real-time information acquisition system,based on STM8L and GPRS,are put forward.Based on STM8L,the system real-time measures environmental information such as wind direction,wind speed,strength of pressure,temperature and humidity uses attitude circuit,air pressure,temperature and humidity sensor.The status of the wind power generation group is remotely monitored by GPRS wireless communication module so as to monitor the wind farm status in real-time and improve the measure accuracy for the wind power.
Wind direction;Wind speed;Air pressure;Power;Posture circuit;Temperature;Humidity
10.3969/j.issn.1002-2279.2016.05.016
TP274.2
A
1002-2279(2016)05-0064-04
❋国家自然科学基金(61364008);云南省应用基础研究重点项目(2014FA029);云南省教育厅重点基金项目(2013Z127);昆明理工大学复杂工业控制学科方向团队建设计划
吴锦生(1993-),男,广东省汕头市人,在读硕士,主研方向:嵌入式系统与运动控制。
王剑平(1975-),男,湖南省衡阳市人,副教授,主研方向:实时运动控制及嵌入式计算机技术。
2016-03-07
