用超声波测距的四旋翼无人机三维防撞系统设计*
2016-11-26陈根华黎嘉明葛旭文
陈根华,黎嘉明,葛旭文
(南昌工程学院信息工程学院,南昌330099)
用超声波测距的四旋翼无人机三维防撞系统设计*
陈根华,黎嘉明,葛旭文
(南昌工程学院信息工程学院,南昌330099)
针对四旋翼无人机碰撞事故多发的问题,设计了一款基于超声波测距原理的四旋翼无人机三维防撞系统。本系统利用超声波技术实现测距,将无人机与周围障碍间三维空间方向上的距离信息采集到控制系统,控制系统根据距离信息控制悬停信号与遥控信号,实现无人机自主防撞,最后通过试验证明了该系统的正确性与合理性。该系统满足了四旋翼无人机安全防撞要求,且具有重量轻、体积小、精度高、安全可靠等特点。
四旋翼无人机;超声波测距;三维防撞系统
引 言
随着无人飞行器技术的不断发展,四旋翼无人机作为方便灵活的运载工具,广泛应用于航拍、工程监测、大坝安检等领域[1]。由于四旋翼无人机自身条件的制约,极易受飞行环境的影响,而且,无人机操控者因视觉误差或操作失误,也会导致碰撞发生,以上因素严重限制了四旋翼无人机在复杂恶劣环境中的应用。目前,四旋翼无人机普遍采用保护架、降落伞等硬件保护措施[2],但是在遭遇猛烈碰撞时,仍然会严重受损,且大大增加了无人机重量,缩短了其续航时间,因此,设计一款无人机自主防撞系统具有重要工程意义。
针对现有四旋翼无人机保护措施无法避免碰撞意外发生的问题,本文设计了安全防撞距离可调的四旋翼无人机三维防撞系统。该系统利用超声波测距技术,测量无人机与周围障碍间三维空间方向上的距离,并设计自主防撞算法,确定悬停信号的产生,控制无人机的飞行状态,实现自主防撞。
1 系统工作原理
1.1 超声波测距原理
超声波是指频率大于20 k Hz的声波[3],其方向性好,易于定向发射,常用于非接触式测量领域。超声波测距的方法主要有相位检测法、声波幅值检测法、时间渡越法,本文选用时间渡越法测量三维空间方向距离。时间渡越法是由硬件或软件产生多个脉冲的40 k Hz方波信号,经过功率放大后送到超声波发射探头,发射探头发出多个脉冲的40 k Hz超声波信号。超声波借助空气介质进行传播,遇到障碍物后反射,超声波接收探头接收反射回来的声波信号,其超声波传播所经历的时间与超声波传播距离有关。因此,通过超声波传播时间,可计算出障碍物与超声波探头间的实际距离。超声波测距原理如图1所示。障碍物与超声波探头间的实际距离S为[3-4]:

其中T为超声波传播时间,C为超声波传播速度。

图1 超声波测距原理
由于超声波传播速度与温度、空气介质的成分、空气浓度有关,但温度对超声波传播速度的影响最大。为了保证超声波测距的精度,需要考虑温度对超声波传播速度的影响[4]。超声波传播速度与温度的关系为:
C=331.5+0.606T
其中C为超声波传播速度;单位为m/s;T为温度,单位为℃。
1.2 自主防撞算法及实现
设超声波测距模块测得的三维距离分别为Rx、Ry、Rz,安全防撞距离分别设置为Sx、Sy、Sz,定义悬停触发变量FFc为:

遥控发射机与接收机利用脉冲调制技术实现信号的传输与识别。大多数无人机遥控器利用PPM信号进行信号传输,在接收机端经解码转化为各通道PWM信号。飞控根据PWM信号信息,控制无人机飞行。
下面详细介绍飞控信号的参数特征。本系统PPM信号的帧信号周期为20 ms,其中通道数为10。PPM信号经解码后得到PWM信号,其信号周期为20 ms,脉冲宽度为1~2 ms。飞控根据上/下、前/后、左/右三条通道的脉冲宽度,决定无人机的飞行方向。当PWM信号脉宽为1.5 ms时[1-2],为静止点,即无人机处于悬停状态。本系统正是利用这一特性,对无人机方向进行分析与控制。
本系统作用于飞控与接收机之间,控制传入飞控的方向信号。当悬停触发变量FFc=1时,单片机控制CD4066切断接收机方向信号,导入由单片机产生的脉宽为1.5 ms的悬停信号,使无人机处于悬停状态。同时,单片机监测接收机方向信号的脉宽,并根据脉宽信息确定是否重新导入接收机信号,从而达到自主防撞的目的。自主防撞设计实现示意图如图2所示。

图2 三维自主防撞设计示意图
2 系统总体设计
本系统采用5个TCT40-16T/R超声波传感器,对三维空间方向距离进行测量。系统主要由恩智浦公司的MK60FX512VLQ15单片机[4]、超声波发射接收电路、信号开关电路、温度补偿检测电路、声光报警电路、人机交互电路组成,如图3所示。其中MK60FX512VLQ15单片机作为控制器,负责采集超声波距离信号、分析多旋翼无人机遥控接收机PWM信号、控制悬停信号与接收机信号的信号开关、超声波距离信息温度补偿、声光报警、数据显示、按键消息处理等任务;CD4066多路模拟开关组成信号开关电路,对悬停信号与接收机信号进行导入与切断; DS18B20温度传感器组成温度补偿电路,对超声波距离信息进行温度补偿;OLED12864液晶与键盘输入模块组成人机交互电路,方便用户对系统进行调试。
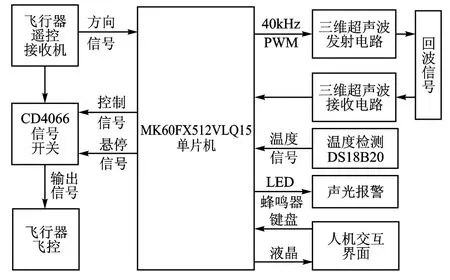
图3 系统总体设计功能框图
3 系统硬件设计
3.1 超声波发射电路
超声波发射探头发射电路需要产生40 k Hz、占空比为50%的方波,且驱动能力很高。产生40 k Hz方波的方法有硬件电路法和软件法,本系统选用软件法,即利用单片机软件编程产生标准40 k Hz、占空比为50%的PWM信号作为发射信号,降低了系统电路的复杂程度,然而单片机输出功率不足,因此,本系统采用6个反相器构成推挽式电路[5],对单片机PWM信号进行功率放大,使其发射距离足够远,满足系统测量需求。超声波发射电路如图4所示。
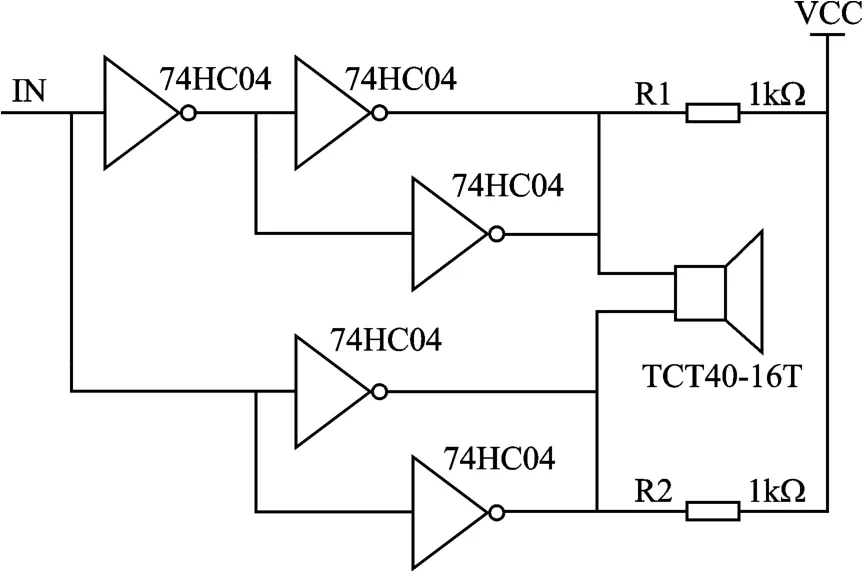
图4 超声波发射电路
3.2 超声波接收电路
超声波接收探头接收到回波信号后,将信号转换为脉冲信号。但由于超声波经过反射后有较大损耗,且回波信号中带有干扰噪声,因此需要对信号进行放大、整形、滤波。本系统选用CX20106A集成电路芯片对信号进行处理,其是一款红外线检波接收专用芯片,常用于电视机红外遥控接收器[5],内部集成了放大、滤波、整形电路,且红外遥控器载波频率为38 k Hz,与本系统所使用的超声波频率相近,因此可用于处理超声波回波信号。超声波接收电路如图5所示。

图5 超声波接收电路
3.3 信号开关电路
本系统采用CD4066多路模拟开关芯片作为信号开关,控制单片机产生的悬停信号以及遥控接收机信号的导入与切断,使各信号按照单片机指令传入飞控。CD4066可传输模拟信号的频率上限为40 MHz,各开关间的串扰小,每个模拟开关有输入、输出、控制三个端口。当控制端加高电平时,开关导通;当控制端加低电平时,开关截止。
3.4 温度补偿检测电路
由于温度对声速影响较大,因此增加了温度补偿电路,以使三维距离信息更加精确。本系统采用DS18B20温度传感器[6]实时检测当前温度,该传感器测量范围为-55~+125℃,测量结果以数字信号串行方式传送,具有精度高、体积小、电路简单的特点。
3.5 人机交互电路与声光报警电路
人机交互电路由OLED12864液晶和按键组成,方便用户切换工作模式以及设置安全防撞距离。声光报警电路由强光LED和蜂鸣器组成,方便用户及时发现无人机的危险状况。
4 系统软件设计
本系统软件设计以IAR Embedded Workbench for ARM为集成开发环境,采用C语言编程,系统软件流程如图6所示。

图6 系统软件设计流程图
系统上电后,首先对单片机、超声波测距电路、温度传感器、OLED12864液晶进行初始化设置,然后进入系统预设界面,单片机读取当前温度信息、三维空间方向距离信息、各通道PWM信号参数,液晶显示三维方向距离信息、用户模式以及安全距离,其中用户模式分为报警模式和自动防撞模式。当无人机处于待飞状态时,用户可以通过按键设置安全距离和用户模式。
无人机处于飞行状态时,可以实时监测周围三维空间距离信息,计算悬停触发变量FFc。当FFc=1时,单片机产生悬停信号,并通过CD4066导入飞控,使无人机处于悬停状态,同时,单片机读取该方向遥控信号,若检测到该方向遥控信号为反向运动,则恢复导入遥控信号,切断悬停信号,使无人机只能朝相反方向运动,达到自主防撞目的。
5 试验测试与结果
为了验证该系统的防撞性能,在装配有大疆NAZA V2飞控,以及分别装配有华科尔DEVO 10接收机、天地飞7接收机、乐迪AT9接收机的三款四旋翼无人机上进行多次测试。试验结果表明,该系统较好地实现了自主防撞功能,满足了防撞设计需求。系统自动防撞测试结果如表1所列。

表1 系统自动防撞测试
结 语
本文设计的四旋翼无人机三维防撞系统,适用于以PWM信号标准的主流飞控,解决了传统无人机采用硬件保护实现防撞存在的问题。该系统创新地利用无人机与超声波技术实现了自主防撞,并提出了相应的防撞算法,大大提高了无人机的安全性,同时,该系统设计具有成本低、重量轻、体积小、精度高等特点,为无人机在复杂环境中的应用提供了安全保障,具有重要的工程意义。
[1]陈谣.四旋翼飞行器三维防撞系统[J].科技资讯,2015(26): 255-256.
[2]杨尚云,曾体贤,黄超.基于超声波测距的无人机自动保护气囊系统[J].西华师范大学学报,2013,34(4):409-413.
[3]闫姝.基于单片机的超声波测距仪的设计[J].电子技术与软件工程,2014(15):129.
[4]何琳.声学理论与工程应用[M].北京:科学出版社,2007.
[5]秦伟.基于CX20106A的超声波倒车雷达设计[J].压电与声光,2011,33(1):161-164.
[6]刘承桥.MSP430F149的无线温湿度环境实时监测系统[J].单片机与嵌入式系统应用,2015(5):61-64.
陈根华(副教授),研究方向为电子系统设计。
10 ④当时间足够长后,各个节点工作时钟的差距会越来越大,以致出现时间槽混叠的现象,从而导致集群传输通道瘫痪。在TDMA周期为20 ms,包含4个平分TDMA周期节点的集群中,发生一次时间槽混叠而导致集群传输通道发送瘫痪的时间间隔约为:

图5为在加入同步算法后,各个节点的运行状态,可以得到以下结论:
①集群运行约8.5 min后,各个节点的本地时钟相对于全局时钟的误差维持在±30μs范围内;
②集群中各个节点运行正常,同步算法能够抑制由于时钟晶振稳定度不同而导致的各个节点工作时钟的偏差,从而保证集群的正常运行。
结 语
本文设计了一种基于Welch-lynch中值增量修正法的同步算法来保持TTP/C集群的时钟同步技术。在Zynq平台上自主设计实现了一种基于时间触发的TTP/ C总线控制器,并搭建了TTP/C总线通信测试平台对时钟同步算法进行验证。验证结果表明,提出的时钟同步算法能够保证TTP/C测试节点的同步误差维持在±30μs,保证各个节点在各自时间槽内正常收发数据。
[1]Time-Triggered Protocol TTP/C High-Level Specification Document Protocol Version 1.1,2003.
[2]刘冬冬.开放式FADEC系统架构及可靠性建模技术研究[D].南京:南京航空航天大学,2013.
[3]刘冬冬,张天宏,陈建,等.TTP/C协议的关键特性研究[J].计算机测量与控制,2012,20(20):2769-1772.
[4]陈建.基于FPGA的TTP/C总线控制器设计及验证[D].南京:南京航空航天大学,2012.
[5]Xilinx公司.Zynq7000可扩展处理平台[J].世界电子元器件,2011(6):43-46.
陈飞(硕士研究生)、张文豪(硕士),主要从事航空发动机控制系统设计与仿真;张天宏(教授),研究方向为嵌入式控制系统、系统控制与仿真。
Three-dimensional Anti-collision System of Quadrotor Based on Ultrasonic Ranging
Chen Genhua,Li Jiaming,Ge Xuwen
(School of Information Engineering,Nanchang Institute of Technology,Nanchang 330099,China)
Aiming at the frequent collisions of the quadrotors,a three-dimensional anti-collision system is proposed,which is based on the ultrasonic ranging.As an indirect range measurement,the ultrasonic ranging system collects three-dimensional ranges between the quadrotor and its surrounding obstacles.Through processing the three-dimensional ranges,the microcontroller controls the hovering signal and the cut-offs of remote signal for autonomous anti-collision of the quadrotor.This system design is validated by the field experiment,which meets the anti-collision requirements.It is light in weight,small in size,high in ranging accuracy,reliable in safety.
quadrotor;ultrasonic ranging;three-dimensional anti-collision system
TP323.3
A
国家自然科学青年基金项目(NO.61401187);江西省大学生创新创业专项基金项目(NO.201411319026)。
(责任编辑:薛士然2016-03-22)
(责任编辑:薛士然2016-04-11)
