基于标准可加性模糊系统的足球机器人守门员的路径规划
2016-11-25余轲邓本再
余轲,邓本再
(长沙理工大学 电气与信息工程学院,湖南 长沙 410000)
基于标准可加性模糊系统的足球机器人守门员的路径规划
余轲,邓本再
(长沙理工大学 电气与信息工程学院,湖南 长沙 410000)
机器人足球世界杯作为一项大型的国际机器人足球比赛和学术活动,其目的是为了促进分布式人工智能、智能机器人技术及其相关领域的研究与发展。在一场足球机器人比赛中,守门员机器人的作用尤为重要,因而要求守门员机器人的每一个动作快速、准确。本文以对方带球进攻运动员的位置及运动速度为依据,利用标准可加性模糊系统和标准可加性模型,对足球机器人守门员路径规划问题进行详细的分析,构建一种针对足球机器人比赛中守门员的路径规划。以保证足球机器人守门员作出更加快速、有效、无误的动作。通过Matlab R2013a对其进行仿真,仿真表明,足球机器人守门员的运动路径准确性和路径得到优化。
标准可加性模糊行为系统;足球机器人;守门员;路径规划
机器人足球世界杯作为一项大型的国际机器人足球比赛和学术活动,其目的是为了促进分布式人工智能、智能机器人技术及其相关领域的研究与发展[1]。机器人足球比赛通过提供一个标准的比赛平台来检验各种智能机器人技术[2]。它有利于将人工智能理论的研究与实践结合起来,检验新的思想、新的技术,促进机器人相关科学技术的发展。机器人足球赛所催生出来的成熟的一系列高新技术,将为社会经济的发展和文化的延伸提供重要手段。机器人足球不仅是一种前沿研究的竞争和高技术对抗活动,又是一项具有类似足球观赏性、刺激性和娱乐性的项目。
在机器人足球比赛过程中,机器人根据所处的环境和自身的状态做出分析,并作出相应的动作。当对方机器人进攻时,我方守门员应根据对方进攻队员的距离、速度、方向做出判断,并做好拦截准备。若守门员机器人与球的碰撞角度调整不好,则很容易造成拦截动作失误,更甚者将造成乌龙球。针对机器人守门员的运动动作问题,在下文中,首先根据对方进攻机器人距离我方球门的距离判断射门的可能性,再根据进攻机器人的运动方向和运动速度计算出足球的运动轨迹,最后根据足球的运动轨迹做出相应的动作。
1 机器人足球比赛场地与守门机制
足球机器人比赛场地是一个长为18 m,宽为12 m的矩形。球门区域定义如下:在距离每个球门柱内侧0.75 m处画有两条与球门垂直的线[3]。这些线延伸入场内0.75 m出与一条平行与球门线的直线相交。这些线与球门线所确定的区域为球门区。球门放于两边球门线的中央。其包括两个与角旗等距的立柱和顶部与立柱相连的横梁。立柱相距2 m,横梁边缘距离地面1 m。门柱和横梁的宽度为12.5 cm。机器人足球比赛场地如图1所示。
在比赛过程中,守门员的运动轨迹有各个方面的因素的影响,如对方进攻运动员的位置、对方进攻运动员的运动速度等。文中对足球机器人守门员的运动路径进行规划,将进攻运动员的位置及其运动速度作为系统的输入量,将足球机器人守门员的运动方向和运动速度作为输出量。采用模糊系统来拟合输入量和输出量之间的关系。
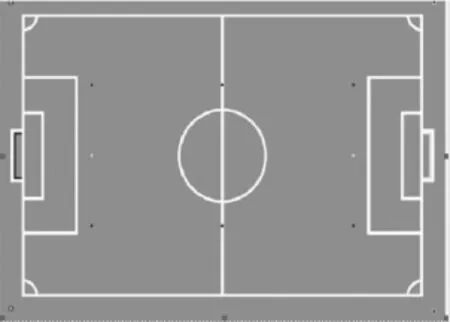
图1 足球机器人比赛场地
2 守门员运动路径的分析计算方法
2.1 标准可加性模糊行为系统
标准可加性模糊行为系统是由MIT的R.A.Brooks于20世纪80年代提出[7]。早期的模糊系统不具备可加性,只是以并运算的方式将激活的则部分模糊集合组合起来,只获取了极值中的最大值,而忽略了其他部分,实验所得结果误差相对较大。标准可加性模糊系统则在这一方面有所改进。一个可加性模糊系统F储存了m条模糊规则,这些规则具有形式:如果“X=Ai,那么Y=Bi,”,i=1,2,…,m.当一个实数x输入到系统中,激活了所有m条规则的如果部分,系统按比例或加权转化则部分形成一个新的模糊集合Bi。将Bi相加作为输出集合B。系统通过取B的形心,或选取它的众数以及选用其它方式将B“解模糊化”或将其映射为一个标量以得到输出值[6]。
假设模糊系统F:Rn→RP是一个标准可加性模型:

则F(x)是m个部分集合形心的凸和:
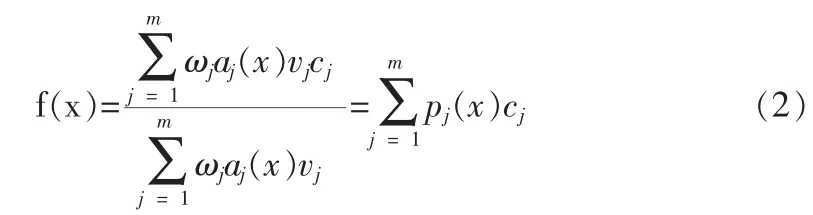
凸系数p1(x),p2(x)…,pm(x)通过以下的关系依赖于输入x:
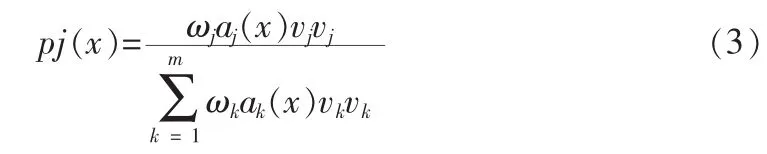
Vj代表有限正容积(或当范围空间Rp中的p=1时,代表面积),cj是则部分集合Bj的形心:
当p=1时,式(4)与式(5)分别简化为:
工程中处理如果部分集函数的因子组合问题时常采用乘积来代替最小,即:

一般采用“重心”方法作为一个常数容量标准可加性模糊系统,如果则部分集合Bj∈Rp的模式或“顶点”Pj与则部分集合的形心cj相等,或者所有则部分集合Bj都有相同的面积或容积Vj,令Vj=l,并且具有相同的规则权重ωj=pj=cj,则标准可加性模糊系统就退化为重心模型为
一个简单的高斯标准可加性模糊作为一个标量映射F:Rn→R时,重心模型可表达为

2.2 标准可加性模糊系统的路径规划
在足球机器人比赛中,守门员对进攻球员的运动判断并做出正确的判断在整个比赛中至关重要。作出正确的预先判断是守门员最为重要的技能之一。作出一个正确的预先判断最为关键的问题则在于判断对方带球进攻的球员的射门位置和足球的运动轨迹。然而,在足球机器人比赛的过程中,影响足球机器人守门员运动路径的因素有很多。在诸多的影响因素中,最为主要的因素有:对方带球进攻的足球机器人的运动速度及其运动方向、距离球门的远近等[6]。文中将根据对方带球进攻球员的位置、运动速度及其运动方向,运用标准可加性模糊行为系统对对方进攻球员射门的可能性进行判断,并做出相应的动作。
3 守门员的路径规划设计
3.1 守门员运动路径设计
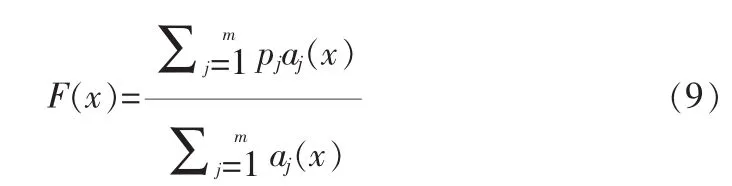
足球机器人由上下两个面板构成,其中上层面板固定有一个全景摄像机,下层面板装有3个声纳[7]。根据全景摄像机所获得的图像及声纳所获得的数据可以判断出对方带球进攻的球员的位置及其运动速度、方向。在比赛开始时,守门员将位于我方球门的中间位置。以守门员为原点,建立位置坐标系。以对方带球进攻的球员的位置及运动速度作为模糊输入量,即对方带球进攻球员的横坐标、纵坐标及其运动速度。守门员的运动路径作为输出量进行模糊控制。选取横坐标的模糊子集为{偏左(left),居中(Mid)、偏右(right)},纵坐标的模糊子集为{偏远(far),居中(Mid)、偏近(jin)},对方带球进攻的球员运动速度的模糊子集为 {快 (qiukly),中 (Mid)、慢(slow)},输入量及输出量的隶属度函数图2所示。
模糊规则的建立如下:如果对方带球进攻球员在左侧,距离球门远则左移;如果对方带球进攻球员在中间,距离球门中等距离则不移动;如果对方带球进攻球员在右侧,距离球门近则右移;如果对方带球进攻球员在左侧,距离球门中等距离则稍左移;如果对方带球进攻球员在右侧,距离球门中等距离则稍右移。模糊规则如图3所示。
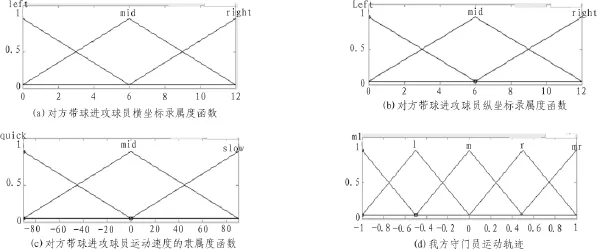
图2 输入量和输出量的隶属度函数
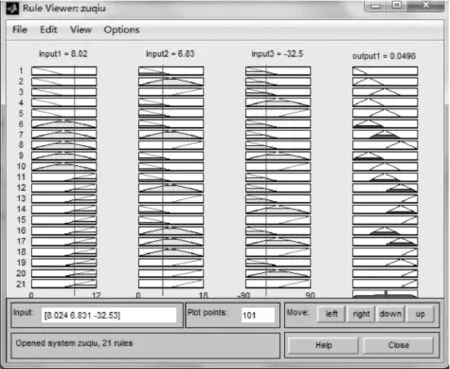
图3 模糊规则
3.2 守门员运动的约束条件
守门员在运动过程中的能量输入必须满足足球机器人的机械特性,包括足球机器人的最大运行速度、最大转到速度、最大加速度等。因此,在确定隶属度函数的时候应考虑上述约束条件[3]。
4 足球机器人守门员路径规划仿真结果
运用Matlab R2013a对输入量及输出量实现标准可加性模糊控制的仿真。标准可加性模糊控制系统的输入量为3个,即以我方守门员为原点,对方带球进攻球员位置的横坐标和纵坐标、对方带球进攻球员的运动速度,输出量为我方守门员的运动轨迹。图4所示为对方带球进攻球员位置与守门员运动轨迹的关系。图5所示为对方带球进攻球员与球门的的垂直距离及运动速度与守门员运动轨迹的关系。
从仿真结果中可以看出,守门员的运动动作又对方带球进攻球员的位置以及对方带球进攻球员的的运动速度所决定。不论是对方带球进攻球员的位置的横坐标、纵坐标发生变化,还是对方带球进攻球员的运动速度发生变化,或者仅仅只有其中一个因素发生变化,都会影响我方守门员的运动动作发生改变。这样守门员可以根据对方球员的运动变化做出调整,提高守门的成功率。
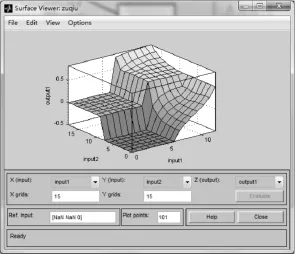
图4 对方带球进攻球员位置与守门员运动轨迹的关系
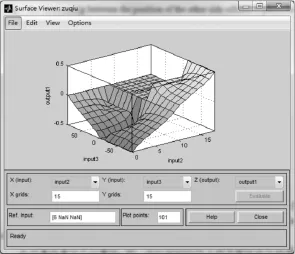
图5 对方带球进攻球员与球门的的垂直距离及运动速度与守门员运动轨迹的关系
5结 论
文中设计的基于标准可加性模糊行为系统对足球机器人守门员的路径规划方法,不仅考虑到对方带球进攻的足球机器人位置和运动速度,以此作为我方足球机器人守门员路径规划的依据,还加入了人的经验知识,而且由于可加性结构来自被激活的则部分集合只和,涵盖了更加全面的信息。运用Matlab R2013a进行仿真发现我方守门员可以根据对方带球进攻球员的位置和运动速度的变化,调整自身运动动作,提高守门拦截的成功率。
[1]黎波,李磊民.博弈论的足球机器人进攻策略研究[J].计算机工程与应用,2011,47(3):224-226.
[2]童小平.教育机器人的应用现状[J].中国教育技术装备,2008(16):138-140.
[3]韩家新,刘彦伯,张旭华.基于分区的带球射门算法研究[J].科学技术与工程,2014,5(13):212-216.
[4]杨洁,居鹤华.标准可加性模糊行为系统的月球车运动规划[J].控制工程,2010,17(增刊):150-154.
[5]王妮妮,张强,刘晓东.基于标准可加性模型的模糊神经网络[J].大连海事大学学报,2002,8(28):73-76.
[6]周形,洪炳熔,周洪玉.基于模块化Q学习的足球机器人合作[J].微型机与应用,2005(10):65-68.
[7]梁冰,洪炳熔.FIRA’2001全自主式机器人竞赛系统[J].计算机应用研究,2003(3):90-92.
Path planning of soccer robot goalkeeper based on standard additive fuzzy system
YU Ke,DENG Ben-zai
(College of Electrical and Information Engineering,Changsha University of Science and Technology,Changsha 410000,China)
Robot soccer World Cup is an international competition for the promotion of distributed artificial intelligence,robotics and related fields of research and development in the field of research and development.In a soccer robot competition,the function of the goalkeeper robot is very important,which requires that the robot's action is fast and accurate.Based on the data of the position as well as the velocity of movement of the attacking players,this paper utilizes the standard additive fuzzy system and standard additive model to carry on a research of the soccer goalkeeper robot motion planning problem,and designs a motion planning which can help the soccer goalkeeper robot to move more quickly,effectively and accurately.The simulation by Matlab R2013a shows that both the accuracy and the efficiency of the robot's path are optimized.
the standard additive fuzzy system;soccer robot;goalkeeper;motion planning
TP2
J
1674-6236(2016)18-0155-04
2015-09-05 稿件编号:201509033
余 轲(1991—),女,湖南长沙人,硕士研究生。研究方向:机器人。