适于滑坡监测的小型无人机遥感系统构建及其应用
2016-11-23林海玉黄海峰龙晶晶李梦园胡乃利李剑南
林海玉 黄海峰,3 龙晶晶 李梦园 胡乃利 李剑南 张 磊
(1. 三峡大学 湖北长江三峡滑坡国家野外科学观测研究站, 湖北 宜昌 443002; 2. 三峡地区地质灾害与生态环境湖北省协同创新中心, 湖北 宜昌 443002; 3.三峡大学 湖北省水电工程智能视觉监测重点实验室, 湖北 宜昌 443002)
适于滑坡监测的小型无人机遥感系统构建及其应用
林海玉1,2黄海峰1,2,3龙晶晶1,3李梦园1,2胡乃利1李剑南1张 磊1
(1. 三峡大学 湖北长江三峡滑坡国家野外科学观测研究站, 湖北 宜昌 443002; 2. 三峡地区地质灾害与生态环境湖北省协同创新中心, 湖北 宜昌 443002; 3.三峡大学 湖北省水电工程智能视觉监测重点实验室, 湖北 宜昌 443002)
构建小型无人机遥感系统,实现对滑坡等地质灾害的常态化监测,对于防灾减灾具有重要现实意义.本文以近年来利用小型无人机遥感针对三峡库区滑坡开展的多次监测实践为基础,构建了一套适于开展滑坡监测的包括无人机机体及飞控、拍摄系统、地面监控等在内的小型无人机遥感系统,并详细阐述了包括航线规划、相机拍照设定、飞行前检查、飞行作业、飞行后检查等在内的滑坡监测流程,最后介绍了具体实例.结果表明,利用小型无人机遥感系统可以获取滑坡正射影像、数字高程模型等遥感成果,进而快速圈定变形区,解决地面调查难以发现或准确确定变形范围的问题.
滑坡; 监测; 小型无人机; 遥感系统
滑坡作为主要地质灾害类型,每年均造成大量人员伤亡或财产损失[1].监测预警[2]作为防治滑坡最主要和最有效的手段,已得到广泛认可,各种监测技术也得到广泛应用.这其中,基于GPS或北斗等导航卫星系统实施的地表位移监测[3],因其高精度、低成本、适应性强等特点,已成为滑坡监测[4]中必不可少的核心监测手段.
然而,这种地表位移监测方法都只能获得事先部署在滑坡体上有限的几个离散点的位移变形数据,而无法获知整个滑坡体表面空间的连续变形特征[5].为了弥补这种不足,遥感方法尤其是高分辨率光学[6]或雷达遥感[7]开始被较为广泛地应用到了滑坡监测和分析方面.然而大型的航天、航空甚至地面遥感却又面临着成本昂贵、技术复杂等现实问题,尤其是受制于时间、气象条件等的影响,无法实现对滑坡灾害的常态化监测.
近年来,随着小型无人机技术的飞速发展,以及数字摄影测量[8]等影像处理方法的成熟,小型无人机遥感开始被广泛应用于自然灾害、环境保护、资源勘查、林业普查等诸多领域[9-11].小型无人机遥感系统(micro unmanned aerial vehicle remote sensing system, Micro-UAVR)具有结构简单、成本低、风险小、机动灵活、快速响应等特点,既能克服载人航空遥感受制于航时长、大机动、恶劣气象条件等问题,又能弥补航天卫星遥感因天气和时间原因无法及时获得目标区域影像问题,同时又避免地面遥感工作范围小、视野窄、工作量大的缺陷[12].
目前,无人机遥感系统主要集中应用到重大自然灾害(如汶川地震、玉树泥石流等)突发后的应急地质灾害评估方面[13],对于常规单体滑坡的持续性监测还较少.而如果在充分考虑滑坡监测特点基础上,构建出经济、实用、高效的适于滑坡监测的小型无人机遥感系统,实现对滑坡灾害的常态化监测以及表面变形分析,对于防灾减灾将具有重要的现实意义.
本文以近年来利用小型无人机遥感针对三峡库区滑坡开展的多次监测实践为基础,构建了一套适于库区滑坡监测的小型无人机遥感系统,并得到了成功应用,以下具体阐述.
1 滑坡监测目的及需求
滑坡监测的目的是及时发现和跟踪灾害体变形信息,从而为防灾减灾提供第一手基础信息资料.因此,滑坡监测首先应具有长期连续性,即现场监测须实现定期常态化(如每月一次).同时,大多数滑坡灾害常位于山区或河谷两岸斜坡,人眼可视范围有限,而且很多灾害体上要么植被覆盖茂密、要么地形陡峭等造成人类无法涉足,加上所处局地气象条件易变(如风力风向不定等).此外,需要监测的滑坡常临近村镇、交通要道分布,坡体周边或上方常有通讯、电力设施等.
考虑到以上条件,用于开展滑坡监测的小型无人机遥感系统应满足以下一些基本需求:体积小、重量轻;安全可靠;现场设置及操控简单方便;起降场地要求低;稳定性好,照片拍摄清晰.
2 小型无人机遥感系统构建
根据滑坡监测目的及需求分析,定制以下适于滑坡监测的小型无人机遥感系统(如图1所示).其核心构成包括:

图1 适于滑坡监测的小型无人机遥感系统
1)小型无人机:考虑到滑坡范围有限,对续航能力要求不高,因此采用更为轻巧、紧凑、稳定性更好的多旋翼碳纤维机身,保证整机(包括相机及云台)重量在5 kg以下.飞行控制系统采用成熟的开源软硬件,便于调试维护;同时配备高性能GPS、数据传输及图像传输模块,可以完整支持包括航线规划、飞行定位、实时数据及图像传输等核心功能.
2)拍摄系统:相机采用1 800万像素以上的普通数码相机即可,为保证照片拍摄清晰,加装相机稳定云台.相机拍照可通过飞行控制系统进行自动控制,同时也可以通过遥控器进行手动控制.
3)地面控制系统:包括地面控制站、遥控器及终端监视器.其中地面控制站利用便携式笔记本电脑安装地面站软件,再通过数据传输模块与无人机上的飞行控制系统进行连接,以实现对无人机遥感系统的配置测试、航线规划[14-16]、操控维护等功能;遥控器主要是实现对无人机系统的手动操控;终端监视器能实时接收并显示无人机的飞行画面以及各状态参数,以便地面操作人员根据这些信息对飞行过程进行有效控制.
3 小型无人机遥感监测滑坡流程
3.1 室内航线初步规划
室内打开地面站软件,进入航线规划模块,加载谷歌地球、必应地图等卫星影像数据,找到需要监测的滑坡位置,在影像图上圈定滑坡大致范围并进行航线规划.注意规划的航线范围必须稍大于滑坡体的实际范围,同时保证照片的航向重叠率不得小于80%和影像旁向重叠率不得小于60%[16].
另外,规划航线还应考虑小型无人机飞行时间(由电池容量决定).如果一次飞行无法完成,则规划航线可以分为几部分,但要保证相邻部分之间具有足够的重叠率.图2为航线规划界面.
3.2 现场航线调整优化
由于室内航线初步规划是根据已有卫星影像地图数据进行的,一般与实际位置存在误差,因此在现场作业之前,必须先根据小型无人机上自带的GPS进行定位,可以根据软件参数中的卫星数目来确定,卫星数目越多,地理定位越是准确;并且还要参照软件参数中的HDOP(horizontal dilution of precision,水平分量精度因子)[17]数据,HDOP数值越小,表示定位的精度越高,对研究山体滑坡的价值也就越大.除此之外,GPS定位能够实现初步规划航线的平面范围调整,以保证无人机飞行路线能完整覆盖滑坡.
此外,还应根据滑坡周边及上空环境进行适当高度优化调整,例如,如果滑坡体上存在高大树木、通讯电力铁塔和线路等,必须调整好飞行高度,以避免无人机飞行过程中发生碰撞.当确定规划航线准确无误后,必须通过地面站软件将其导入到飞行控制系统中去,才能实现小型无人机遥感系统的自主飞行.
3.3 相机拍照设定
为配合自主飞行过程中有规律地自动拍摄滑坡照片,在航线规划完成后,还应在相机上安装控制快门的舵机装置,再将舵机连接到飞行控制系统,然后通过在地面站软件中设置舵量并导入到飞行控制系统,这样无人机在飞行过程中就能够由飞控系统控制相机的自动拍照了.
3.4 飞行前检查
飞行前检查是保证飞行安全的重要前提,主要包括各种线路及设备接触端的检查局,具体包括:①图传检查:通过终端监视器,查看图像传输是否正常、图像是否清晰、状态数据是否叠加显示;②电池电压检测:不同容量电池电压是否正常,低电压报警器是否正常;③飞行控制指令检查:在手持飞行状态下,测试无人机是否精准反映了遥控器的各输出指令;④GPS信号检查:确保至少搜索到7颗GPS卫星且信号稳定,这是保障按规划航线自动飞行的重要前提.⑤相机检查:包括相机是否是否开启、相机参数是否准确、舵机是否工作正常.
3.5 飞行作业
选择相对平坦开阔场地,先由遥控器控制无人机起飞;升空之后,拨动遥控器自动模式开关,小型无人机遥感系统进入自动航线飞行模式,将按照规划航线进行飞行以及像片拍摄作业,飞行过程中应实时注意终端监视器上显示的飞行画面以及各飞行参数(如电池电压、水平飞行距离,竖直高度、卫星数目、电流输出量、飞行速度、飞行时间、飞行方向等),一旦发现异常应及时通过遥控器将飞行模式切换到手动进行操控;飞行作业结束后,无人机会自动返航,也可以通过拨动遥控器返航模式开关使无人机自动返回到起飞地点.
3.6 飞行后检查
飞行结束后,将飞行控制系统中的飞行日志以及相机存储卡上的像片导出到电脑当中,通过地面站软件将飞行日志中的GPS地理位置信息一一对应的写入照片中,地理位置信息导入结束后,检查照片中的地理位置信息,照片属性当中会显示照片的高程以及地理坐标(经纬度坐标),这样通过软件处理的时候能够提高遥感图片的地理位置的精确度,确认无误后对所有照片导入到遥感软件中进行快速数字摄影测量处理,得到低分辨率的滑坡正射影像DOM[18]、数字高程模型DEM[18]和三维模型[19]等,先肉眼观察遥感影像中的滑坡范围大小是否满足要求,是否有无缺失情况,如果有缺失情况则重新进行航线规划重复操作;如果没有缺失情况将滑坡正射影像图和数字高程模型图等导出软件后保存,然后将其导入到ENVI软件当中,主要通过ENVI软件中的几何校正方法[20](如图3所示)进行处理,以及辅助图像融合[21]、图像裁剪、正射校正方法[22]对遥感影像图进行后期处理等增加遥感影像的准确性.将根据影像范围及质量判断飞行任务是否合格.如果最终的遥感影像图范围存在缺陷、图像失真或者达不到精度时,则必须重新调整、规划航线,设置相机拍照功能等各种参数调试、调整问题;如影像存在质量问题,则须检查云台设置情况,需要对云台进行调试以及飞控系统部分参数修改等.解决各种问题之后,进行新一次的飞行作业.
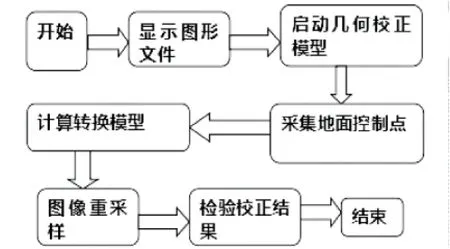
图3 几何校正操作流程
4 应用实例
三峡库区某边坡原为一山梁,夹于两沟之间.由于三峡水库蓄水,该山梁被选为附近城镇回填的取土场地,经过长期取土后,发生一次整体下座滑移,形成了不稳定斜坡.近年来,坡体上也不断发生零星块石滚落以及松散土体下滑现象,严重威胁斜坡下方省级公路运输以及长江支流航运安全(如图4所示).

图4 三峡库区某不稳定斜坡全貌
该不稳定斜坡呈不规则长舌状,长450 m,最宽200 m,面积5.3×104m2,高程分布190~435 m,因此高差达到245 m,平均坡度33°.斜坡存在两级平台,其中一级位于高程约195 m,二级则位于高程245 m,这导致斜坡后部地形更加陡峭,平均坡度达到43°,最陡坡度甚至超过了70°,则意味着人已经无法在坡体上站立甚至行走.除此之外,不稳定斜坡范围以外植被覆盖茂密,也导致人很难通过地面穿行.
为有效防止该不稳定斜坡发生变形而引发灾害,决定对其实施监测预警.考虑到该斜坡规模大、地形陡峭、人类无法涉足等因素,决定采用小型无人机遥感方法进行监测.图5显示了该斜坡的规划航线示意,根据该航线首次飞行自动拍摄了93张像片,通过数字摄影测量处理最后生成了空间分辨率为5cm的数字正射影像DOM和数字高程模型DEM等遥感成果(如图5所示).
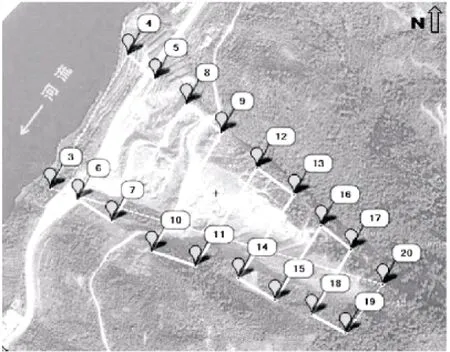
图5 不稳定斜坡的航线规划示意图
借助上述遥感影像成果,可以迅速圈定出该不稳定斜坡内部及周边的四处局部变形(如图6所示):其中,A、B两处变形位于斜坡中下部平台附近位置,通过地面调查就能轻易发现;但C、D两处变形位于斜坡顶部外侧冲沟,周围植被茂密,通过地面调查是很难发现并准确确定变形范围的,但无人机遥感监测轻易解决了该问题.

图6 基于不稳定斜坡正射影像及数字地形成果确定的变形区
后期,对该不稳定斜坡实现了常态化的小型无人机遥感监测.而且基于首次成功的规划航线,后期的监测只需将航线直接导入到飞行控制系统,就可以在现场直接进行飞行采集工作,时间可以压缩到30 min以内,这是其他监测方式不具备的.更重要的是,通过每期监测获得的遥感影像成果,与前期进行对比分析,可以逐渐了解该不稳定斜坡的变形过程,进而分析其变形特征并掌握其变形规律,从而真正实现防灾减灾.此外,小型无人机遥感系统还被应用到多项滑坡、危岩体及边坡恢复治理等工程以辅助勘察设计,以下简明列举几例兴山金乐滑坡(如图7所示),于2014年8月底9月初强降雨后,发生过一次整体下座滑移破坏,当时位于滑体滑动了1.7 m.2014年9月份,首次使用无人机遥感对其进行了应急调查,此后逐步实现了常态化,一直监测至今.
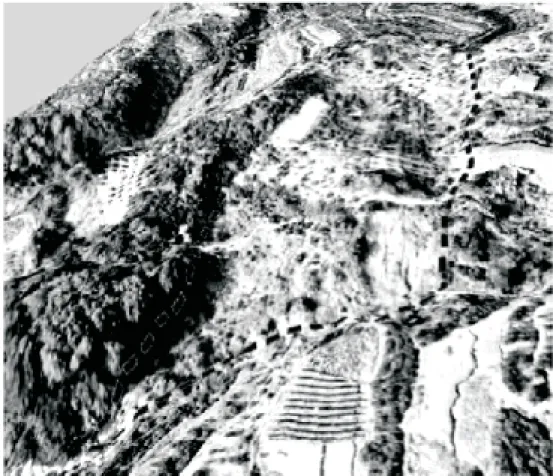
图7 兴山金乐滑坡三维模型图
兴山彭家湾不稳定边坡(如图8所示),受降雨后产生了整体变形,虽然位移较小,但对房屋产生了严重威胁.因此,通过无人机遥感系统对其进行了监测,并且得到正射影像图等成果,以辅助应急勘查设计.
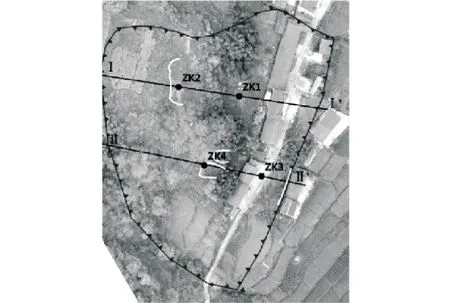
图8 兴山彭家湾不稳定边坡正射影像图
兴山彭家湾滑坡(如图9所示),因为强降雨后导致前缘土体松软产生滑动,严重威胁居民房屋及生命财产安全,因此通过无人机遥感系统得到影像及地形成果,以辅助治理设计.

图9 兴山彭家湾滑坡
夷陵区S334省道天柱山隧道出口公路上方近100 m的垂直陡壁上,存在一危岩体(如图10所示),严重影响着道路安全.为进行应急治理,获得准确的基础地形数据及为重要,但人工地面手段均无法进行准确测量,最后采用无人机遥感手段轻松解决了该问题.
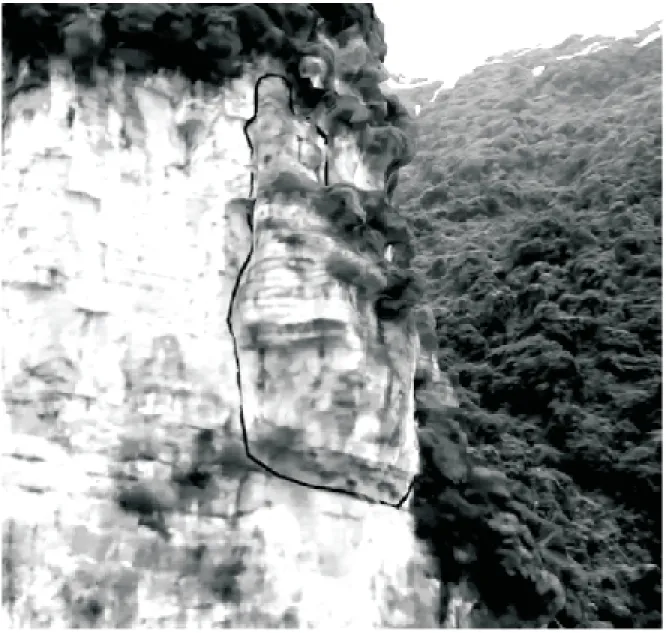
图10 夷陵区天柱山隧道出口危岩模型
5 结论与展望
本文定制了适于滑坡监测的小型无人机遥感系统,并得到成功应用.通过相关实践可以得出以下结论:
1)根据监测目的及需求,适于滑坡监测的小型无人机遥感系统,其机身采用多旋翼碳纤维材料,配备开源飞控系统并能实现航线规划及自动拍照功能;拍摄系统采用1800万像素以上的普通数码相机即可,应加装稳定云台;地面控制站实现对无人机系统的航向规划、操控维护等功能,监视器实时显示无人机飞行画面及状态参数.
2)基于小型无人机遥感的滑坡监测可以分为六个步骤.其中航线规划是保障飞行安全以及拍摄质量的重要前提,分为室内初步规划和现场优化;自动拍照则是通过飞控系统直接控制舵机,舵机直接控制快门的方式实现;飞行前检查必不可少,具体包括图传系统、电池电压、飞控指令、GPS信号以及相机检查;飞行作业是滑坡监测的核心,通常设定为自动飞行模式即可,但应密切注意监视器的飞行画面以及状态参数变化,发现异常应切换至手动模式;飞行后检查主要是判断像片覆盖范围及质量是否满足要求.
3)利用小型无人机遥感系统可以获取滑坡的正射影像以及数字高程模型等成果,从而快速圈定变形区,解决地面调查难以发现或准确确定变形范围的问题.
总之,小型无人机遥感系统在滑坡等地质灾害监测领域表现出了极大优势,但要真正实现对滑坡灾害长期连续的常态化监测,其关键还在于后期根据遥感影像成果有效提取滑坡变形信息的技术方法研究.
[1] 乔建平,王 萌,吴彩燕.汶川8.0级地震灾区滑坡风险评估方法[J].灾害学,2016,31(1):55-59.
[2] 唐亚明,张茂省,薛 强,等.滑坡监测预警国内外研究现状及评述[J].地质评论,2012(3):533-541.
[3] 桂 蕾,殷坤龙.基于多重分形理论的滑坡地表监测位移分析[J].中南大学学报(自然科学版),2014(11):3908-3914.
[4] 陈 楚,姜兴钰.近景摄影测量在滑坡监测中的应用研究[J].城市勘测,2015(1):105-108.
[5] 伏永朋,吴吉民.三峡库区曾家棚滑坡变形特征与成因机制分析[J].华南地质与矿产,2015(1):89-95.
[6] 鲁学军,史振春.滑坡高分辨率遥感多维解译方法及其应用[J].中国图象图形学报,2014,19(1):141-149.
[7] 刘 波,李道京,李冽辰.基于压缩感知的干涉逆合成孔径雷达成像研究[J].电波科学学报,2014(1):19-25.
[8] 卢晓攀.无人机低空摄影测量成图精度时政研究[D].北京:中国矿业大学,2014,6.
[9] 赵 莹,王小平.无人机遥感在抗震救灾中的应用[J].井冈山大学学报(自然科学版),2014(12):113-115.
[10] 李定松.无人机技术在地质灾害监测中的应用[J].北京测绘,2015(4):76-78.
[11] 田建宏,高生飞.无人机低空航拍遥感在应急测绘保障中的应用[J].甘肃科技,2015(4):49-51.
[12] 汪 齐.我国遥感科学与技术发展现状[J].科技致富向导,2015(3):69.
[13] 王福涛,王世新.高分辨率多光谱的芦山地震次生地质灾害遥感监测与评估[J].光谱学与光谱分析,2016(1):181-185.
[14] 廖永生,陈文森.无人机低空数字摄影测量参数计算和路线设计系统[J].测绘通报,2011(9):38-41.
[15] 徐 博,陈立平.基于无人机航向的不规则区域作业航线规划算法与验证[J].农业工程学报,2015,23:173-178.
[16] 李 秀.基于Google地图数据的可视化无人机航线规划研究[J].测绘通报,2014(1):74-76.
[17] 曲正武,孙 伟,吴 健.特殊地区提高GPS测量精度的方法研究[J].中国科技信息,2013(4):62.
[18] 刘 春,万 红.基于无人机影像的大型滑坡区域精细地形构建研究[J].井冈山大学自然版,2015(1):1-7.
[19] 王 鹤,刘 军,王秋玲.利用无人机影像进行滑坡地形三维重建[J].测绘与空间地理,2015(12):68-71.
[20] 冯登超,陈 刚.遥感图像的几何精校正研究[J].国外电子测量技术,2015(5):41-43.
[21] 梁 艳,张书琼.遥感图像融合技术研究与探讨[J].北京测绘,2010(2):72-74.
[22] 韩晓庆,刘 佳.海岸带地区SPOT-5遥感影像无控制点正射校正方法[J].测绘科学,2013(3):121-124.
[责任编辑 周文凯]
Structuring and Applying Micro-UAV Remote Sensing System for Landslides Monitoring
Lin Haiyu1,2Huang Haifeng1,2,3Long Jingjing1,3Li Mengyuan1,2Hu Naili1Li Jiannan1Zhang Lei1
(1. National Field Observation & Research Station of Landslides in Three Gorges Reservoir Area of Yangtze River, China Three Gorges Univ., Yichang 443002, China;2. Collaborative Innovation Center for Geo-Hazards and Eco-Environment in Three Gorges Area of Hubei Province, China Three Gorges Univ., Yichang 443002, China;3. Hubei Key Laboratory of Intelligent Vision Based Monitoring for Hydroelectric Engineering, China Three Gorges Univ., Yichang 443002, China)
Structuring the Micro-UAV remote sensing system and realizing the normal monitoring of landslides and other geological disasters have practical significance for disaster prevention and mitigation. Based on many monitoring practices conducted in landslides of Three Gorges Reservoir, this paper describes a kind of Micro-UAV remote sensing system applied to the monitoring of landslides, including UAV air-frame, flight control, shooting system and ground recording and monitoring system. Meanwhile, this paper thoroughly illustrates the process of monitoring of landslides, flight routes planning, camera shot setting, pre-flight inspection, flight operations and post-flight inspection. The results show that the Micro-UAV remote sensing system can obtain the digital orthophoto map, digital elevation model and other remote sensing outcomes; and it can rapidly delineate deformation zone and resolve the problem that it is difficult for ground investigation to find or accurately determine deformation range.
landslides; monitoring; micro-UAV; remote sensing system
10.13393/j.cnki.issn.1672-948X.2016.05.010
2016-03-28
国家自然科学基金项目(41302260);湖北省水电工程智能视觉监测重点实验室开放基金(2014KLA11);湖北省科技支撑计划项目(2015BCE070);湖北省自然科学基金创新群体项目(2015CFA025)资助.
黄海峰(1978-),男,副教授,博士,主要从事滑坡灾害监测、3S技术应用等方面的研究.E-mail:hhf@ctgu.edu.cn
X924.2
A
1672-948X(2016)05-0053-06