基于自动控制理论的高速循迹智能车设计
2016-11-23林志强万在红
林志强,万在红
(南昌航空大学 信息工程学院,江西 南昌 330063)
基于自动控制理论的高速循迹智能车设计
林志强,万在红
(南昌航空大学 信息工程学院,江西 南昌 330063)
本设计以自动控制系统为研究对象,以飞思卡尔K60单片机为控制核心,设计了一种新型智能高速循迹小车,旨在解决现实生活中勘测、搜救行动中人为难以到达位置的勘探搜救难题。基于自动控制理论的智能高速巡迹小车,利用各类传感器确定路径及姿态,实现智能高速循迹行驶,具有自动稳定控制车身,高速行驶,并稳定回传数据的功能,使现实生活中的搜救勘探活动更加智能高效。
自动控制系统;智能车;pid控制;自动
智能循迹小车作为智能行走机器人的一种,其采用传统的四轮行走的机械结构,具有适应多种环境、抗干扰性强、成本低、安全性高的优点,可代替人进入各种复杂的环境开展各种勘探测量工作[1]。本设计将电路设计技术、传感器技术、自动控制理论等技术知识,综合设计出自动循迹行驶的高速智能小车。本设计具有较强的科学先进性,该小车配备光电传感器,可自动识别路径上存在的黑线。配备的加速度计可监控小车车身的偏移及各方向的加速度。再配以编码器模块,实时得到小车运行速度。最后通过算法综合各种得到的数据,运用自动控制理论实现小车的自动循迹形式。本设计还配有无线传输模块,以实现小车状态的实时回传[2]。
1 硬件系统设计
1.1系统硬件设计总体框架
系统硬件包括:单片机控制系统,采用飞思卡尔k60单片机,传感器检测系统,包括光电传感器,mpu60506轴加速度计,编码器模块,电机驱动模块,无线传输模块。系统整体框图如图1所示。
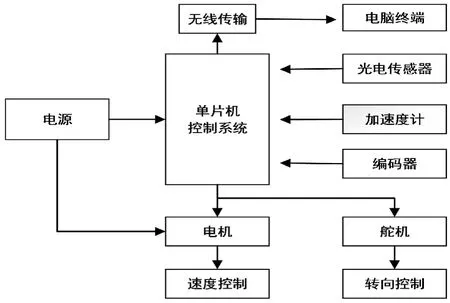
图1 硬件系统总体框架
1.2传感器检测系统
1.2.1线性CCD光电传感器
该模块内置TSL1401CL线性传感器,TSL1401CL线性传感器由128×1列光电二极管,内部集成了电荷放大器电路,以及像素数据保持功能,可同时集成启动和停止所有像素位[3]。该阵列由128个像素构成, 每个像素点都有一个3 524.3 μm2的光敏区域。像素之间有8μm间距。内部控制逻辑简化了芯片操作,只需要一个串行输入(SI)信号和一个时钟信号(Clock)就可以完成全部逻辑控制,读取AO口的电压就可以完成数据采集。在检测到黑线的时候相应点返回较低电压,白色时返回较高电压。通过单片机adc口读取128个电压值,可判断出路径上一条横向线段的情况,如图2所示。本设计采用3个线性ccd,可获取3行图像,融合数据后可判断出前方道路信息,以实现巡迹[4]。
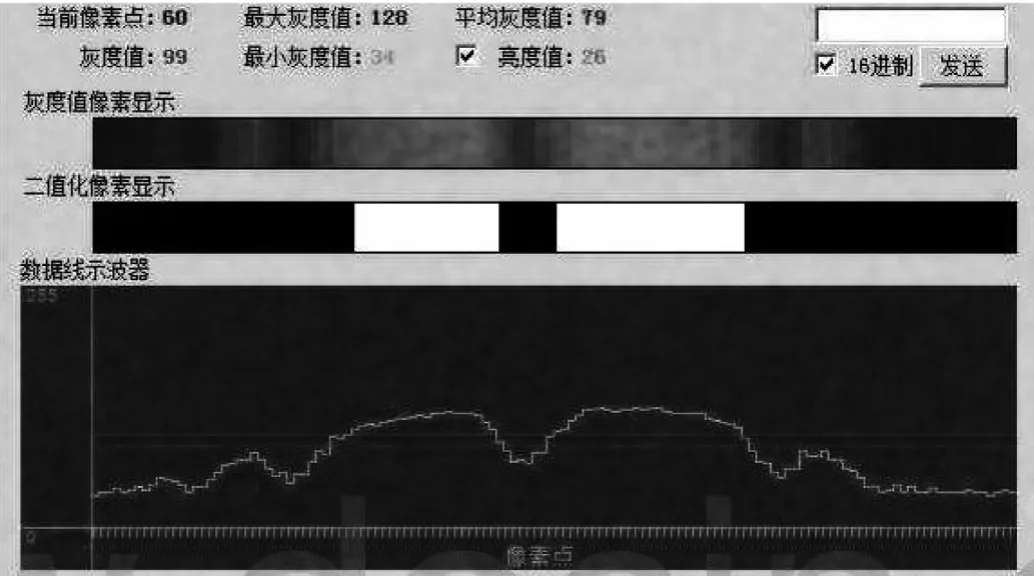
图2 线性ccd道路采集上位机显示数据
1.2.2mpu6050六轴加速度计
mpu6050为三轴陀螺仪三轴加速度计模块,其外观如图3所示,其可输出小车在运行过程中三轴上的加速度和角加速度,对其积分,即可得到小车的角加速度和角速度。其还带有硬件dmp结算能力,即内部的运动引擎,直接输出四元数[5],可以减轻外围微处理器的工作负担且避免了繁琐的滤波和数据融合过程,设计中可选择硬件解算和软件解算两种方式。
若使用软件解算,其角度计算公式为:angle_n=angle_ n-1+(Gyro-C_Gyro)*R_Gryo; angle_n为当前角度值,angle_n-1为上一次计算的角度值,Gyro为陀螺仪敏感轴偏转值,C_Gyro陀螺仪零点偏移值,R_Gyro是陀螺仪比例[6]。通过计算出角度,可以判断出小车运行平地、坡道等状态,因而已实现对小车的不同控制。
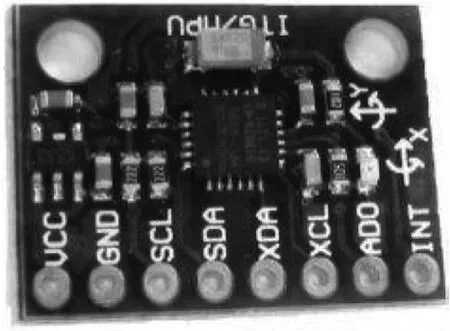
图3 mpu6050模块
1.2.3编码器模块
光电轴角编码器是一种具有代表性的角位移传感器,是一种集光、机、电于一体的数字测角装置[7]。该模块为512线光电增量式编码器,其用光信号扫描分度盘(分度盘与转动轴相连),其内部置有一个512线的光栅,随轮胎转动轴转动,当转动到分度盘的光缝刚好使光照射到接收管时,编码器会输出一个信号脉冲。将其连接到单片机PWM捕获口,利用单片机自带的正交解码功能,可以检测、统计信号的通断数量,由此计算出车轮的正反转向及旋转角度,从而得到小车的运行速度。
1.2.4电机驱动模块
如图4所示,该电路由脉宽调制电动机控制芯片HIP4802 4 个mos管搭建的H桥组成,单片机输入PWM脉冲,由HIP4802控制H桥电路的通断时间。直流电机驱动使用最广泛的是H型伞桥式电路,这种驱动电路能方便地实现电机的四象限运行,即正转、正转制动、反转、反转制动[8]。当一定时间内电路导通时间占比大时,电机转动就快。当导通时间占比小时,电机转动就慢。电路不导通时电机停止转动。4个mos管相当于4个开关,当Q2和Q3导通时,电机正向转动[9]。当Q1和Q4导通时,电机反向转动。场效应管为压控元件,输入阻抗大,开关速度快,且可承受大电流通过,满足小车的高速行驶控制的性能要求。
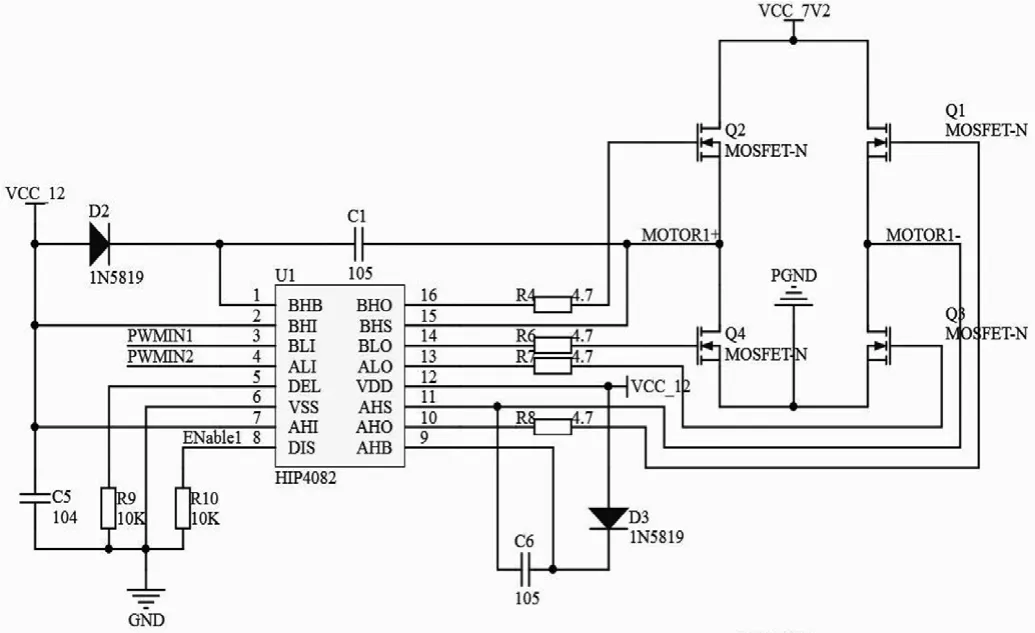
图4 电机驱动电路
1.2.5无线传输模块
无线传输模块采用目前通信采用最广泛的2.4 G通讯技术,其采用nrf24l01无线通讯芯片,其电路如图5所示,配以较大功率天线,其传输距离可达100 m以上[10]。其可被单片机配置为接受或发送模式,还可以配置频道、地址、每次发送的字节数、是否带CRC校验、功率等。具有多通道抗干扰传输的优点,可实现一对六多向通讯,高效且稳定。
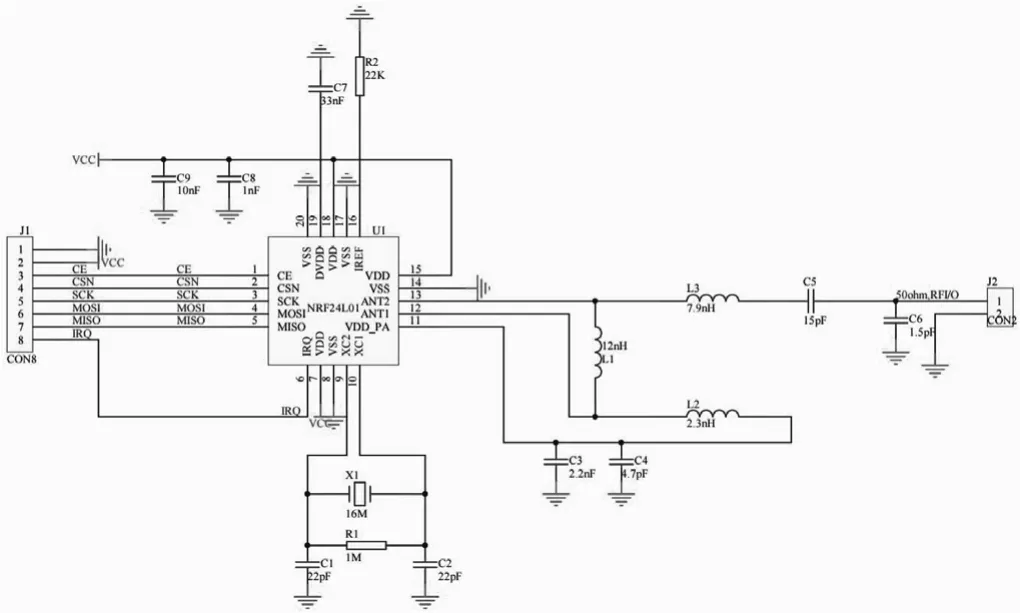
图5 无线传输模块电路
2 软件系统设计
2.1软件系统设计整体框架
本程序采用定时中断控制系统,每隔10 ms进行一次数据采集,每隔5 ms进行姿态调整,确保车身控制的稳定性和及时性。软件设计总体框架如图6所示。
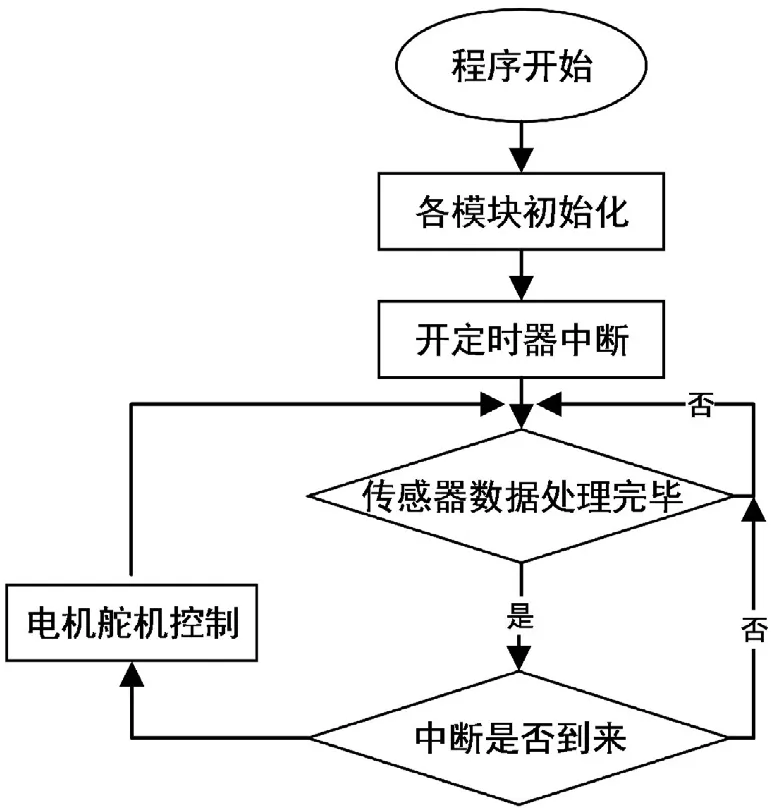
图6 软件设计总体框图
2.2算法设计
2.2.1pid控制算法
pid控制器是自动控制理论中最重要的控制器之一。其运用偏差量的比例(p)、积分(I)和微分(d)进行控制。在实际运用中,发现对舵机的控制采用位置式pd控制的效果最好,而对电机控制采用增量式pid效果最好[11]。
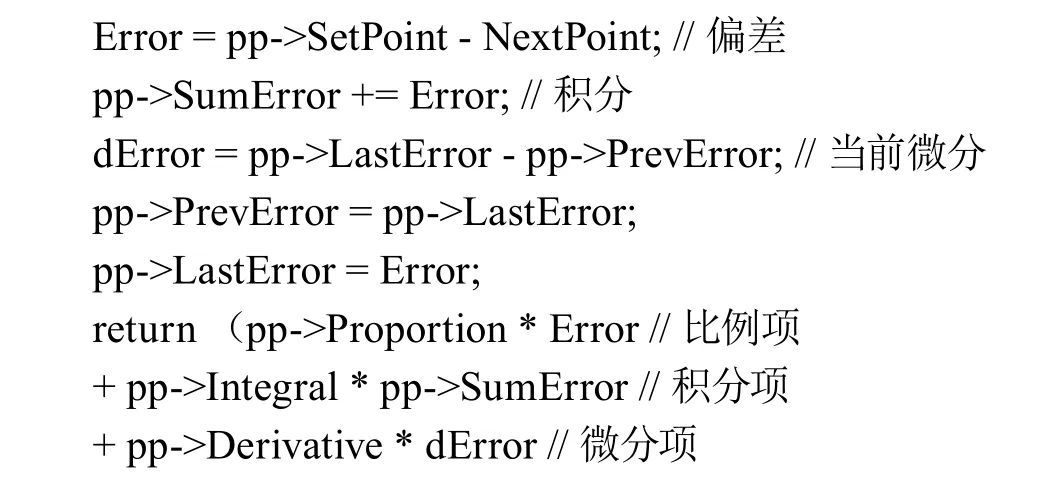
位置式pid理想算式为:

其输出量即为控制量,可直接用于舵机的控制输出。式中:
u(t)—控制器(也称调节器)的输出;
e(t)—控制器的输入(常常是设定值与被控量之差,即e(t)=r(t)-c(t);
Kp—控制器的比例放大系数;
Ti—控制器的积分时间;
Td—控制器的微分时间。
其算法为:
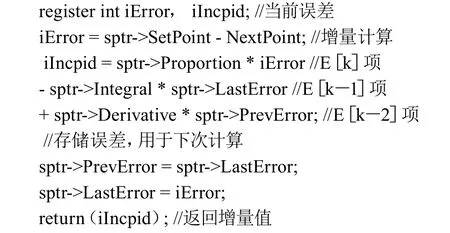
而增量式pid的输出只是控制量的增量,需要对控制量增量累加后对电机输出控制[12],其算法如下:
2.2.2动态P控制算法
在实际pid控制运用中,为实现小车适应各种环境,保证车身稳定,固定pid值的pid算法效果,在实际Matlab仿真后,发现将小车舵机控制所用的p值(pid控制中的比例值)与计算出的车身与路径的偏移量拟合成一条二次曲线后,舵机打角及时,过弯流畅,可实现高速过弯[13]。其实现代码如下:
pp->Proportion = a*Err*Err+b*Err+c。
实际调试中,根据所面临的环境,理论计算出实际所需的二次曲线。在MATLAB中,调整a,b,c 3值使所得曲线近似拟合为所需要的实际曲线即可。
2.3路径识别算法
在路径识别上,本设计采用二值化处理图像,用基于阈值的中值滤波算法通过设定阈值,判断像素是否为噪点,如果是噪点,可通过中值滤波消除其影响[14]。然后对图像进行二值化,使图像只具有黑白两变量。最后通过逐点查找数据跳变沿确定道路边缘。左右边缘确定后即可通过求中值确定智能车位置。将其偏移量导入舵机和电机pid计算实现小车的方向和速度控制[15]。
3 结语
该设计采用单片机控制搭载传感控制电路为硬件平台,结合自动控制理论综合设计算法,极大地提高智能车的自适应能力。经实际运用测试,该小车能在多种环境下高速机动行驶,具有稳定可靠的功能,达到设计目标。
[1]杨会成,费琛,王筱薇倩,等.基于单目视觉的智能寻迹小车设计与实现[J].重庆理工大学学报(自然科学版),2013(3):441-455.
[2]师树恒,孙明,师素娟.基于MC9S12XS28的智能循迹小车设计[J].自动化与仪表,2012(4):50-60.
[3]骆文博,王广志,丁海曙,等.基于线阵 CCD的高精度位置检测[J].清华大学学报(自然科学版),2002(9):1139-1143.
[4]李晶,袁峰,丁振良.基于Rodrigues参数的多线阵CCD外姿态测量系统的姿态解算[J].光学精密工程,2012(4):858-864.
[5]王显军.光电轴角编码器细分信号误差及精度分析[J].光学精密工程,2012(2):379-386.
[6]胡发焕,邱小童,蔡咸健.基于场效应管的大功率直流电机驱动电路设计[J].电机与控制应用,2011(4):21-25.
[7]张荣辉,贾宏光,陈涛,等.基于四元数法的捷联式惯性导航系统的姿态解算[J].光学精密工程,2008(10):1963-1971.
[8]丁明理,王祁,宋凯.无陀螺惯性测量组合姿态解算新方法[J].哈尔滨工业大学学报,2006(7):1025-1028.
[9]刘玉兵,张俞,吴江源.2.4 G无线文件传输系统的设计与实现[J].中国集成电路,2012(3):77-81.
[10]余晓填,杨曦,陈安,等.基于移动机器人直流电机驱动电路的设计与应用[J].微电机,2011(11):37-41.
[11]仇成群,刘成林,沈法华,等.基于Matlab和模糊PID的汽车巡航控制系统设计[J].农业工程学报,2012(6):197-203.
[12]罗天资,陈卫兵,邹豪杰.直线电机模糊增量PID控制算法的研究[J].测控技术,2011(2):56-60.
[13]王志坚,张凤登.基于CAN总线的分布式动态PID算法实现[J].信息技术,2015(4):181-185
[14]李 进,陈无畏,李碧春,等.自动导引车视觉导航的路径识别和跟踪控制[J].农业机械学报,2008(2):20-24.
[15]季聪,王思明,汉鹏武.智能车路径识别与控制研究[J].电视技术,2013(9):192-209.
Design of high speed intelligent car based on automatic control theroy
Lin Zhiqiang, Wan Zaihong
(Information Engineering College of Nanchang Hangkong University, Nanchang 330063, China)
In order to resolve the difficulty in some place where human is hard to reach in search and rescue activities, this design designed a new type high-speed smart car, which used the free scale K60 micro controller as the control core, choosing the automatic control system as the research object. Based on the theory of automatic control, the intelligent high speed tracking car used all kinds of sensor to determine the path and posture, to achieve the requirement of driving high-speed and automatically. The design has advantage of intelligent, high speed tracking and automatic stabilization control body, and with the function of the stability of return data, it makes search and rescue exploration activities in reality more intelligent and efficient.
automatic control system; intelligent car; pid control; automatic
林志强(1995— ),男,江西赣州,本科;研究方向:电子信息技术,自动控制技术。
